SSD 源码分析
来源:互联网 发布:天龙八部辅助软件 编辑:程序博客网 时间:2024/05/25 08:15
http://blog.csdn.net/mydear_11000/article/details/73867041
SSD(SSD: Single Shot MultiBox Detector)是采用单个深度神经网络模型实现目标检测和识别的方法。如图0-1所示,该方法是综合了Faster R-CNN的anchor box和YOLO单个神经网络检测思路(YOLOv2也采用了类似的思路,详见YOLO升级版:YOLOv2和YOLO9000解析),既有Faster R-CNN的准确率又有YOLO的检测速度,可以实现高准确率实时检测。在300*300分辨率,SSD在VOC2007数据集上准确率为74.3%mAP,59FPS;512*512分辨率,SSD获得了超过Fast R-CNN,获得了80%mAP/19fps的结果,如图0-2所示。SSD关键点分为两类:模型结构和训练方法。模型结构包括:多尺度特征图检测网络结构和anchor boxes生成;训练方法包括:ground truth预处理和损失函数。本文解析的是SSD的tensorflow实现源码,来源balancap/SSD-Tensorflow。本文结构如下:
1,多尺度特征图检测网络结构;
2,anchor boxes生成;
3,ground truth预处理;
4,目标函数;
5,总结
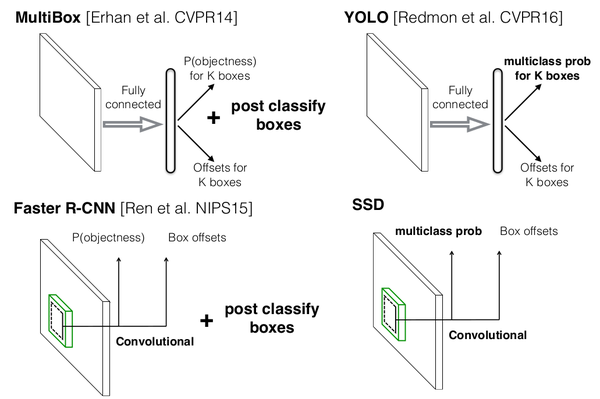
图0-1 SSD与MultiBox,Faster R-CNN,YOLO原理(此图来源于作者在eccv2016的PPT)
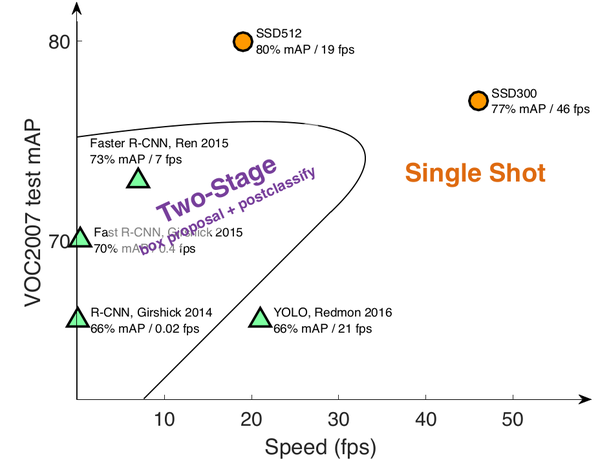
图0-2 SSD检测速度与精确度。(此图来源于作者在eccv2016的PPT)
1 多尺度特征图检测网络结构
SSD的网络模型如图1-1所示。
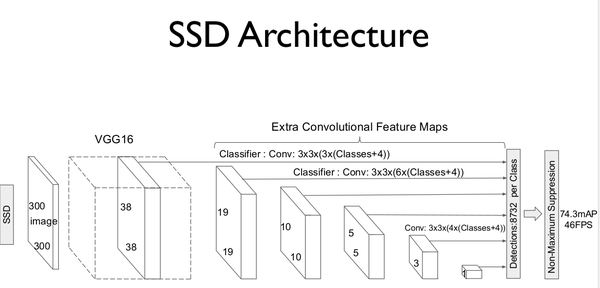
图1-1 SSD模型结构。(此图来源于原论文)
模型建立源代码包含于ssd_vgg_300.py中。模型多尺度特征图检测如图1-2所示。模型选择的特征图包括:38×38(block4),19×19(block7),10×10(block8),5×5(block9),3×3(block10),1×1(block11)。对于每张特征图,生成采用3×3卷积生成 默认框的四个偏移位置和21个类别的置信度。比如block7,默认框(def boxes)数目为6,每个默认框包含4个偏移位置和21个类别置信度(4+21)。因此,block7的最后输出为(19*19)*6*(4+21)。
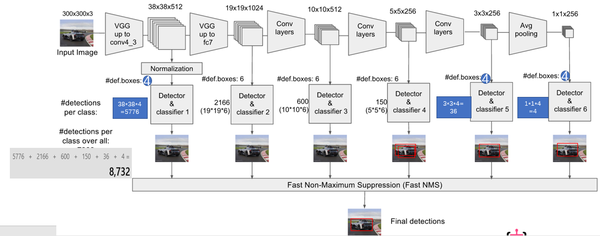
图1-2 多尺度特征采样(此图来源:知乎专栏)
其中,初始化参数如下:
""" Implementation of the SSD VGG-based 300 network. The default features layers with 300x300 image input are: conv4 ==> 38 x 38 conv7 ==> 19 x 19 conv8 ==> 10 x 10 conv9 ==> 5 x 5 conv10 ==> 3 x 3 conv11 ==> 1 x 1 The default image size used to train this network is 300x300. """ default_params = SSDParams( img_shape=(300, 300),#输入尺寸 num_classes=21,#预测类别20+1=21(20类加背景) #获取feature map层 feat_layers=['block4', 'block7', 'block8', 'block9', 'block10', 'block11'], feat_shapes=[(38, 38), (19, 19), (10, 10), (5, 5), (3, 3), (1, 1)], # 每个特性层上的anchor大小都不一样, 越靠近输入的层其anchor越小。
# 确定第一个与最后一个feature层的anchor大小以后, 处于中间的层的anchor大小则通过线性插值计算而来。例如,假如anchor_size_bounds = [0.2, 0.7], 有6个feature layer,则每个layer对应的default anchor大小为:[0.2, 0.3, 0.4, 0.5, 0.6, 0.7]. anchor_size_bounds=[0.15, 0.90], #anchor boxes的大小 anchor_sizes=[(21., 45.), (45., 99.), (99., 153.), (153., 207.), (207., 261.), (261., 315.)], #anchor boxes的aspect ratios anchor_ratios=[[2, .5], [2, .5, 3, 1./3], [2, .5, 3, 1./3], [2, .5, 3, 1./3], [2, .5], [2, .5]], anchor_steps=[8, 16, 32, 64, 100, 300],#anchor的层 anchor_offset=0.5,#补偿阀值0.5 normalizations=[20, -1, -1, -1, -1, -1],#该特征层是否正则,大于零即正则;小于零则否 prior_scaling=[0.1, 0.1, 0.2, 0.2] )建立模型代码如下,作者采用了TensorFlow-Slim(类似于keras的高层库)来建立网络模型,详细内容可以参考TensorFlow-Slim网页。
#建立ssd网络函数def ssd_net(inputs, num_classes=21, feat_layers=SSDNet.default_params.feat_layers, anchor_sizes=SSDNet.default_params.anchor_sizes, anchor_ratios=SSDNet.default_params.anchor_ratios, normalizations=SSDNet.default_params.normalizations, is_training=True, dropout_keep_prob=0.5, prediction_fn=slim.softmax, reuse=None, scope='ssd_300_vgg'): """SSD net definition. """ # End_points collect relevant activations for external use. #用于收集每一层输出结果 end_points = {} #采用slim建立vgg网络,网络结构参考文章内的结构图 with tf.variable_scope(scope, 'ssd_300_vgg', [inputs], reuse=reuse): # Original VGG-16 blocks. net = slim.repeat(inputs, 2, slim.conv2d, 64, [3, 3], scope='conv1') end_points['block1'] = net net = slim.max_pool2d(net, [2, 2], scope='pool1') # Block 2. net = slim.repeat(net, 2, slim.conv2d, 128, [3, 3], scope='conv2') end_points['block2'] = net net = slim.max_pool2d(net, [2, 2], scope='pool2') # Block 3. net = slim.repeat(net, 3, slim.conv2d, 256, [3, 3], scope='conv3') end_points['block3'] = net net = slim.max_pool2d(net, [2, 2], scope='pool3') # Block 4. net = slim.repeat(net, 3, slim.conv2d, 512, [3, 3], scope='conv4') end_points['block4'] = net net = slim.max_pool2d(net, [2, 2], scope='pool4') # Block 5. net = slim.repeat(net, 3, slim.conv2d, 512, [3, 3], scope='conv5') end_points['block5'] = net net = slim.max_pool2d(net, [3, 3], 1, scope='pool5')#max pool #外加的SSD层 # Additional SSD blocks. # Block 6: let's dilate the hell out of it! #输出shape为19×19×1024 net = slim.conv2d(net, 1024, [3, 3], rate=6, scope='conv6') end_points['block6'] = net # Block 7: 1x1 conv. Because the fuck. #卷积核为1×1 net = slim.conv2d(net, 1024, [1, 1], scope='conv7') end_points['block7'] = net # Block 8/9/10/11: 1x1 and 3x3 convolutions stride 2 (except lasts). end_point = 'block8' with tf.variable_scope(end_point): net = slim.conv2d(net, 256, [1, 1], scope='conv1x1') net = slim.conv2d(net, 512, [3, 3], stride=2, scope='conv3x3') end_points[end_point] = net end_point = 'block9' with tf.variable_scope(end_point): net = slim.conv2d(net, 128, [1, 1], scope='conv1x1') net = slim.conv2d(net, 256, [3, 3], stride=2, scope='conv3x3') end_points[end_point] = net end_point = 'block10' with tf.variable_scope(end_point): net = slim.conv2d(net, 128, [1, 1], scope='conv1x1') net = slim.conv2d(net, 256, [3, 3], scope='conv3x3', padding='VALID') end_points[end_point] = net end_point = 'block11' with tf.variable_scope(end_point): net = slim.conv2d(net, 128, [1, 1], scope='conv1x1') net = slim.conv2d(net, 256, [3, 3], scope='conv3x3', padding='VALID') end_points[end_point] = net # Prediction and localisations layers. #预测和定位 predictions = [] logits = [] localisations = [] for i, layer in enumerate(feat_layers): with tf.variable_scope(layer + '_box'): #接受特征层的输出,生成类别和位置预测 p, l = ssd_multibox_layer(end_points[layer], num_classes, anchor_sizes[i], anchor_ratios[i], normalizations[i]) #把每一层的预测收集 predictions.append(prediction_fn(p))#prediction_fn为softmax,预测类别 logits.append(p)#概率 localisations.append(l)#预测位置信息 return predictions, localisations, logits, end_points2 anchor box生成
对每一张特征图,按照不同的大小(scale) 和长宽比(ratio) 生成生成k个默认框(default boxes),原理图如图2-1所示(此图中,默认框数目k=6,其中5×5的红色点代表特征图,因此:5*5*6 = 150 个boxes)。
每个默认框大小计算公式为:,其中,m为特征图数目,为最底层特征图大小(原论文中值为0.2,代码中为0.15),为最顶层特征图默认框大小(原论文中为0.9,代码中为0.9)。
每个默认框长宽比根据比例值计算,原论文中比例值为,因此,每个默认框的宽为,高为。对于比例为1的默认框,额外添加一个比例为的默认框。最终,每张特征图中的每个点生成6个默认框。每个默认框中心设定为,其中,为第k个特征图尺寸。
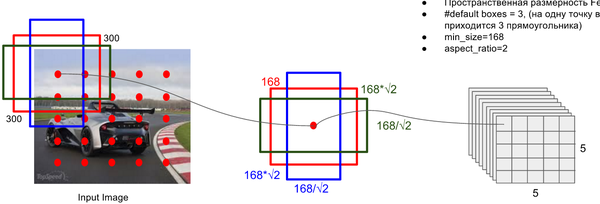
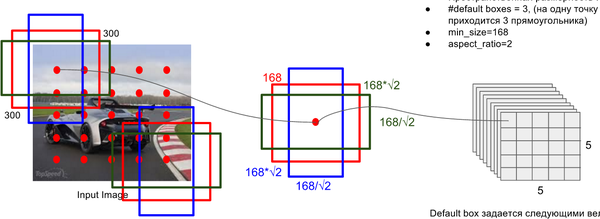
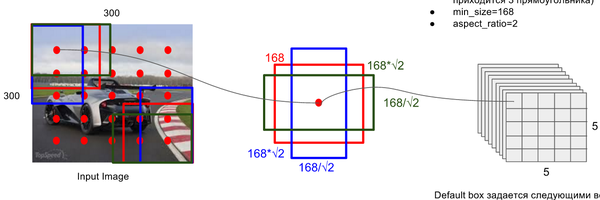
图2-1 anchor box生成示意图(此图来源于知乎专栏)
源代码中,默认框生成函数为ssd_anchor_one_layer(),代码如下:
#生成一层的anchor boxesdef ssd_anchor_one_layer(img_shape,#原始图像shape feat_shape,#特征图shape sizes,#预设的box size ratios,#aspect 比例 step,#anchor的层 offset=0.5, dtype=np.float32): """Computer SSD default anchor boxes for one feature layer. Determine the relative position grid of the centers, and the relative width and height. Arguments: feat_shape: Feature shape, used for computing relative position grids; size: Absolute reference sizes; ratios: Ratios to use on these features; img_shape: Image shape, used for computing height, width relatively to the former; offset: Grid offset. Return: y, x, h, w: Relative x and y grids, and height and width. """ # Compute the position grid: simple way. # y, x = np.mgrid[0:feat_shape[0], 0:feat_shape[1]] # y = (y.astype(dtype) + offset) / feat_shape[0] # x = (x.astype(dtype) + offset) / feat_shape[1] # Weird SSD-Caffe computation using steps values... """ #测试中,参数如下 feat_shapes=[(38, 38), (19, 19), (10, 10), (5, 5), (3, 3), (1, 1)] anchor_sizes=[(21., 45.), (45., 99.), (99., 153.), (153., 207.), (207., 261.), (261., 315.)] anchor_ratios=[[2, .5], [2, .5, 3, 1./3], [2, .5, 3, 1./3], [2, .5, 3, 1./3], [2, .5], [2, .5]] anchor_steps=[8, 16, 32, 64, 100, 300] offset=0.5 dtype=np.float32 feat_shape=feat_shapes[0] step=anchor_steps[0] """ #测试中,y和x的shape为(38,38)(38,38) #y的值为 #array([[ 0, 0, 0, ..., 0, 0, 0], # [ 1, 1, 1, ..., 1, 1, 1], # [ 2, 2, 2, ..., 2, 2, 2], # ..., # [35, 35, 35, ..., 35, 35, 35], # [36, 36, 36, ..., 36, 36, 36], # [37, 37, 37, ..., 37, 37, 37]]) y, x = np.mgrid[0:feat_shape[0], 0:feat_shape[1]] #测试中y=(y+0.5)×8/300,x=(x+0.5)×8/300 y = (y.astype(dtype) + offset) * step / img_shape[0] x = (x.astype(dtype) + offset) * step / img_shape[1] #扩展维度,维度为(38,38,1) # Expand dims to support easy broadcasting. y = np.expand_dims(y, axis=-1) x = np.expand_dims(x, axis=-1) # Compute relative height and width. # Tries to follow the original implementation of SSD for the order. #数值为2+2 num_anchors = len(sizes) + len(ratios) #shape为(4,) h = np.zeros((num_anchors, ), dtype=dtype) w = np.zeros((num_anchors, ), dtype=dtype) # Add first anchor boxes with ratio=1. #测试中,h[0]=21/300,w[0]=21/300? h[0] = sizes[0] / img_shape[0] w[0] = sizes[0] / img_shape[1] di = 1 if len(sizes) > 1: #h[1]=sqrt(21*45)/300 h[1] = math.sqrt(sizes[0] * sizes[1]) / img_shape[0] w[1] = math.sqrt(sizes[0] * sizes[1]) / img_shape[1] di += 1 for i, r in enumerate(ratios): h[i+di] = sizes[0] / img_shape[0] / math.sqrt(r) w[i+di] = sizes[0] / img_shape[1] * math.sqrt(r) #测试中,y和x shape为(38,38,1) #h和w的shape为(4,) return y, x, h, w3 ground truth预处理
训练过程中,首先需要将label信息(ground truth box,ground truth category)进行预处理,将其对应到相应的默认框上。根据默认框和ground truth box的jaccard 重叠来寻找对应的默认框。文章中选取了jaccard重叠超过0.5的默认框为正样本,其它为负样本。
源代码ground truth预处理代码位于ssd_common.py文件中,关键代码如下:
#label和bbox编码函数def tf_ssd_bboxes_encode_layer(labels,#ground truth标签,1D tensor bboxes,#N×4 Tensor(float) anchors_layer,#anchors,为list matching_threshold=0.5,#阀值 prior_scaling=[0.1, 0.1, 0.2, 0.2],#缩放 dtype=tf.float32): """Encode groundtruth labels and bounding boxes using SSD anchors from one layer. Arguments: labels: 1D Tensor(int64) containing groundtruth labels; bboxes: Nx4 Tensor(float) with bboxes relative coordinates; anchors_layer: Numpy array with layer anchors; matching_threshold: Threshold for positive match with groundtruth bboxes; prior_scaling: Scaling of encoded coordinates. Return: (target_labels, target_localizations, target_scores): Target Tensors. """ # Anchors coordinates and volume. #获取anchors层 yref, xref, href, wref = anchors_layer ymin = yref - href / 2. xmin = xref - wref / 2. ymax = yref + href / 2. xmax = xref + wref / 2. #xmax的shape为((38, 38, 1), (38, 38, 1), (4,), (4,))(38, 38, 4) #体积 vol_anchors = (xmax - xmin) * (ymax - ymin) # Initialize tensors... shape = (yref.shape[0], yref.shape[1], href.size) feat_labels = tf.zeros(shape, dtype=tf.int64) feat_scores = tf.zeros(shape, dtype=dtype) #shape为(38,38,4) feat_ymin = tf.zeros(shape, dtype=dtype) feat_xmin = tf.zeros(shape, dtype=dtype) feat_ymax = tf.ones(shape, dtype=dtype) feat_xmax = tf.ones(shape, dtype=dtype) #计算jaccard重合 def jaccard_with_anchors(bbox): """Compute jaccard score a box and the anchors. """ # Intersection bbox and volume. int_ymin = tf.maximum(ymin, bbox[0]) int_xmin = tf.maximum(xmin, bbox[1]) int_ymax = tf.minimum(ymax, bbox[2]) int_xmax = tf.minimum(xmax, bbox[3]) h = tf.maximum(int_ymax - int_ymin, 0.) w = tf.maximum(int_xmax - int_xmin, 0.) # Volumes. inter_vol = h * w union_vol = vol_anchors - inter_vol \ + (bbox[2] - bbox[0]) * (bbox[3] - bbox[1]) jaccard = tf.div(inter_vol, union_vol) return jaccard #条件函数 def condition(i, feat_labels, feat_scores, feat_ymin, feat_xmin, feat_ymax, feat_xmax): """Condition: check label index. """ #tf.less函数 Returns the truth value of (x < y) element-wise. r = tf.less(i, tf.shape(labels)) return r[0] #主体 def body(i, feat_labels, feat_scores, feat_ymin, feat_xmin, feat_ymax, feat_xmax): """Body: update feature labels, scores and bboxes. Follow the original SSD paper for that purpose: - assign values when jaccard > 0.5; - only update if beat the score of other bboxes. """ # Jaccard score. label = labels[i] bbox = bboxes[i] scores = jaccard_with_anchors(bbox)#计算jaccard重合值 # 'Boolean' mask. #tf.greater函数返回大于的布尔值 mask = tf.logical_and(tf.greater(scores, matching_threshold), tf.greater(scores, feat_scores)) imask = tf.cast(mask, tf.int64) fmask = tf.cast(mask, dtype) # Update values using mask. feat_labels = imask * label + (1 - imask) * feat_labels feat_scores = tf.select(mask, scores, feat_scores) feat_ymin = fmask * bbox[0] + (1 - fmask) * feat_ymin feat_xmin = fmask * bbox[1] + (1 - fmask) * feat_xmin feat_ymax = fmask * bbox[2] + (1 - fmask) * feat_ymax feat_xmax = fmask * bbox[3] + (1 - fmask) * feat_xmax return [i+1, feat_labels, feat_scores, feat_ymin, feat_xmin, feat_ymax, feat_xmax] # Main loop definition. i = 0 [i, feat_labels, feat_scores, feat_ymin, feat_xmin, feat_ymax, feat_xmax] = tf.while_loop(condition, body, [i, feat_labels, feat_scores, feat_ymin, feat_xmin, feat_ymax, feat_xmax]) # Transform to center / size. #计算补偿后的中心 feat_cy = (feat_ymax + feat_ymin) / 2. feat_cx = (feat_xmax + feat_xmin) / 2. feat_h = feat_ymax - feat_ymin feat_w = feat_xmax - feat_xmin # Encode features. feat_cy = (feat_cy - yref) / href / prior_scaling[0] feat_cx = (feat_cx - xref) / wref / prior_scaling[1] feat_h = tf.log(feat_h / href) / prior_scaling[2] feat_w = tf.log(feat_w / wref) / prior_scaling[3] # Use SSD ordering: x / y / w / h instead of ours. feat_localizations = tf.stack([feat_cx, feat_cy, feat_w, feat_h], axis=-1) return feat_labels, feat_localizations, feat_scores#ground truth编码函数def tf_ssd_bboxes_encode(labels,#ground truth标签,1D tensor bboxes,#N×4 Tensor(float) anchors,#anchors,为list matching_threshold=0.5,#阀值 prior_scaling=[0.1, 0.1, 0.2, 0.2],#缩放 dtype=tf.float32, scope='ssd_bboxes_encode'): """Encode groundtruth labels and bounding boxes using SSD net anchors. Encoding boxes for all feature layers. Arguments: labels: 1D Tensor(int64) containing groundtruth labels; bboxes: Nx4 Tensor(float) with bboxes relative coordinates; anchors: List of Numpy array with layer anchors; matching_threshold: Threshold for positive match with groundtruth bboxes; prior_scaling: Scaling of encoded coordinates. Return: (target_labels, target_localizations, target_scores): Each element is a list of target Tensors. """ with tf.name_scope(scope): target_labels = [] target_localizations = [] target_scores = [] for i, anchors_layer in enumerate(anchors): with tf.name_scope('bboxes_encode_block_%i' % i): #将label和bbox进行编码 t_labels, t_loc, t_scores = \ tf_ssd_bboxes_encode_layer(labels, bboxes, anchors_layer, matching_threshold, prior_scaling, dtype) target_labels.append(t_labels) target_localizations.append(t_loc) target_scores.append(t_scores) return target_labels, target_localizations, target_scores#编码goundtruth的label和bbox def bboxes_encode(self, labels, bboxes, anchors, scope='ssd_bboxes_encode'): """Encode labels and bounding boxes. """ return ssd_common.tf_ssd_bboxes_encode( labels, bboxes, anchors, matching_threshold=0.5, prior_scaling=self.params.prior_scaling, scope=scope)4 目标函数
SSD目标函数分为两个部分:对应默认框的位置loss(loc)和类别置信度loss(conf)。定义 为第i个默认框和对应的第j个ground truth box,相应的类别为p。目标函数定义为:
其中,N为匹配的默认框。如果N=0,loss为零。为预测框和ground truth box 的Smooth L1 loss,值通过cross validation设置为1。
定义如下:其中,为预测框,为ground truth。为补偿(regress to offsets)后的默认框()的中心,为默认框的宽和高。
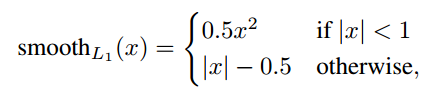
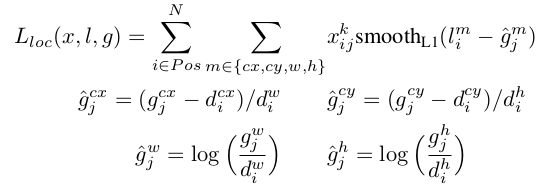 其中,
其中,定义为多累别softmax loss,公式如下:
目标函数定义源码位于ssd_vgg_300.py,注释如下:
 目标函数定义源码位于ssd_vgg_300.py,注释如下:
目标函数定义源码位于ssd_vgg_300.py,注释如下:# =========================================================================== ## SSD loss function.# =========================================================================== #def ssd_losses(logits, #预测类别 localisations,#预测位置 gclasses, #ground truth 类别 glocalisations, #ground truth 位置 gscores,#ground truth 分数 match_threshold=0.5, negative_ratio=3., alpha=1., label_smoothing=0., scope='ssd_losses'): """Loss functions for training the SSD 300 VGG network. This function defines the different loss components of the SSD, and adds them to the TF loss collection. Arguments: logits: (list of) predictions logits Tensors; localisations: (list of) localisations Tensors; gclasses: (list of) groundtruth labels Tensors; glocalisations: (list of) groundtruth localisations Tensors; gscores: (list of) groundtruth score Tensors; """ # Some debugging... # for i in range(len(gclasses)): # print(localisations[i].get_shape()) # print(logits[i].get_shape()) # print(gclasses[i].get_shape()) # print(glocalisations[i].get_shape()) # print() with tf.name_scope(scope): l_cross = [] l_loc = [] for i in range(len(logits)): with tf.name_scope('block_%i' % i): # Determine weights Tensor. pmask = tf.cast(gclasses[i] > 0, logits[i].dtype) n_positives = tf.reduce_sum(pmask)#正样本数目 #np.prod函数Return the product of array elements over a given axis n_entries = np.prod(gclasses[i].get_shape().as_list()) # r_positive = n_positives / n_entries # Select some random negative entries. r_negative = negative_ratio * n_positives / (n_entries - n_positives)#负样本数 nmask = tf.random_uniform(gclasses[i].get_shape(), dtype=logits[i].dtype) nmask = nmask * (1. - pmask) nmask = tf.cast(nmask > 1. - r_negative, logits[i].dtype) #cross_entropy loss # Add cross-entropy loss. with tf.name_scope('cross_entropy'): # Weights Tensor: positive mask + random negative. weights = pmask + nmask loss = tf.nn.sparse_softmax_cross_entropy_with_logits(logits[i], gclasses[i]) loss = tf.contrib.losses.compute_weighted_loss(loss, weights) l_cross.append(loss) #smooth loss # Add localization loss: smooth L1, L2, ... with tf.name_scope('localization'): # Weights Tensor: positive mask + random negative. weights = alpha * pmask loss = custom_layers.abs_smooth(localisations[i] - glocalisations[i]) loss = tf.contrib.losses.compute_weighted_loss(loss, weights) l_loc.append(loss) # Total losses in summaries... with tf.name_scope('total'): tf.summary.scalar('cross_entropy', tf.add_n(l_cross)) tf.summary.scalar('localization', tf.add_n(l_loc))5 总结
本文对SSD: Single Shot MultiBox Detector的tensorflow的关键源代码进行了解析。本文采用的源码来自于balancap/SSD-Tensorflow。源码作者写得非常详细,内容较多(其它还包括了图像预处理,多GPU并行训练等许多内容),因此只选取了关键代码进行解析。在看完论文后,再结合关键代码分析,结构就很清晰了。SSD代码实现的关键点为:1,多尺度特征图检测网络结构;2,anchor boxes生成;3,ground truth预处理;4,目标函数。SSD和YOLOv2类似,可以实现高准确率下的实时目标检测,是非常值得研究和改进的目标检测方法。
- SSD 源码分析
- SSD关键源码解析
- SSD 源码(1)
- ssd-300 代码分析
- SSD模型分析
- 磁盘与SSD性能分析
- SSD源码解读1~~~~~~~~~~ssd_pascal.py
- SSD的caffe源码解读 -- 数据增强
- ssd
- SSD
- SSD
- ssd
- SSD
- SSD
- ssd
- SSD
- ssd
- SSD
- 191。Number of1 Bits
- HDU 3032 Nim or not Nim?
- http和https区别
- Delphi中资源的简单应用
- getchar/getche/getch/gets/scanf/printf/puts/putchar
- SSD 源码分析
- 196. Delete Duplicate Emails
- HDU2255-奔小康赚大钱
- hibernate创建Configuration不同方法
- Java中的private、protected、public和default的区别
- TObject的create和destroy
- 2. Add Two Numbers
- borel集
- 照片墙


