最近邻分类器(Nearest Neighbor Classifier)
来源:互联网 发布:认知语言学与人工智能 编辑:程序博客网 时间:2024/05/16 09:48
先从简单的方法开始说,先提一提最近邻分类器/Nearest Neighbor Classifier,不过事先申明,它和深度学习中的卷积神经网/Convolutional Neural Networks其实一点关系都没有,我们只是从基础到前沿一点一点推进,最近邻是图像识别一个相对简单和基础的实现方式。
1.1 CIFAR-10
CIFAR-10是一个非常常用的图像分类数据集。数据集包含60000张32*32像素的小图片,每张图片都有一个类别标注(总共有10类),分成了50000张的训练集和10000张的测试集。如下是一些图片示例:
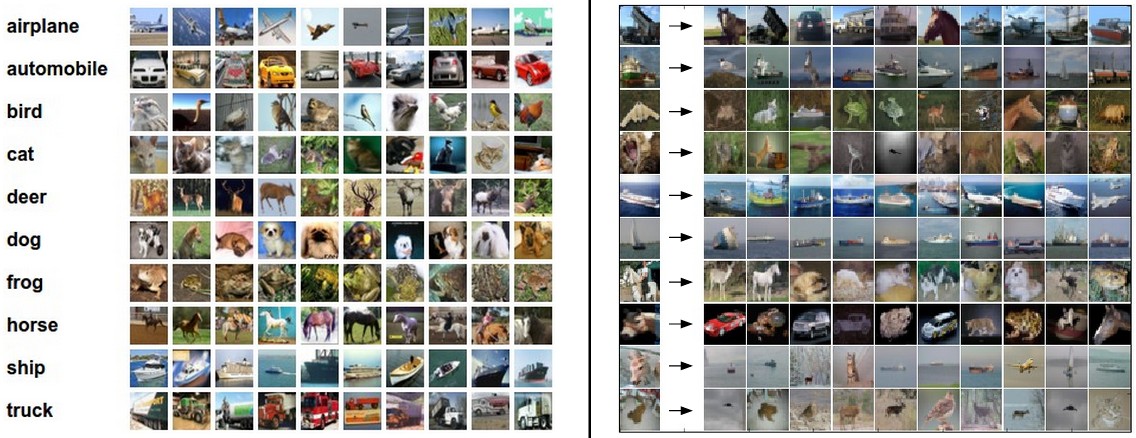
上图中左边是十个类别和对应的一些示例图片,右边是给定一张图片后,根据像素距离计算出来的,最近的10张图片。
1.2 基于最近邻的简单图像类别判定
假如现在用CIFAR-10数据集做训练集,判断一张未知的图片属于CIFAR-10中的哪一类,应该怎么做呢。一个很直观的想法就是,既然我们现在有每个像素点的值,那我们就根据输入图片的这些值,计算和训练集中的图片距离,找最近的图片的类别,作为它的类别,不就行了吗。
恩,想法很直接,这就是『最近邻』的思想。偷偷说一句,这种直接的做法在图像识别中,其实效果并不是特别好。比如上图是按照这个思想找的最近邻,其实只有3个图片的最近邻是正确的类目。
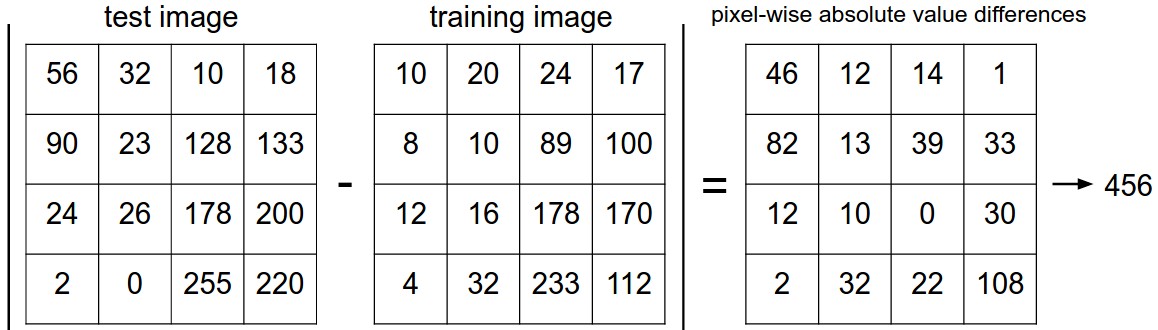
即使这样,作为最基础的方法,还是得掌握,我们来简单实现一下吧。我们需要一个图像距离评定准则,比如最简单的方式就是,比对两个图像像素向量之间的l1距离(也叫曼哈顿距离/cityblock距离),公式如下:
其实就是计算了所有像素点之间的差值,然后做了加法,直观的理解如下图:
我们先把数据集读进内存:
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
下面我们实现最近邻的思路:
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
最近邻的思想在CIFAR上得到的准确度为38.6%,我们知道10各类别,我们随机猜测的话准确率差不多是1/10=10%,所以说还是有识别效果的,但是显然这距离人的识别准确率(94%)实在是低太多了,不那么实用。
1.3 关于最近邻的距离准则
我们这里用的距离准则是l1距离,实际上除掉l1距离,我们还有很多其他的距离准则。
- 比如说l2距离(也就是大家熟知的欧氏距离)的计算准则如下:
- 比如余弦距离计算准则如下:
更多的距离准则可以参见scipy相关计算页面.
2. K最近邻分类器(K Nearest Neighbor Classifier)
这是对最近邻的思想的一个调整。其实我们在使用最近邻分类器分类,扫描CIFAR训练集的时候,会发现,有时候不一定距离最近的和当前图片是同类,但是最近的一些里有很多和当前图片是同类。所以我们自然而然想到,把最近邻扩展为最近的N个临近点,然后统计一下这些点的类目分布,取最多的那个类目作为自己的类别。
恩,这就是KNN的思想。
KNN其实是一种特别常用的分类算法。但是有个问题,我们的K值应该取多少呢。换句话说,我们找多少邻居来投票,比较靠谱呢?
3.1 交叉验证与参数选择
在现在的场景下,假如我们确定使用KNN来完成图片类别识别问题。我们发现有一些参数是肯定会影响最后的识别结果的,比如:
- 距离的选择(l1,l2,cos等等)
- 近邻个数K的取值。
每组参数下其实都能产生一个新的model,所以这可以视为一个模型选择/model selection问题。而对于模型选择问题,最常用的办法就是在交叉验证集上实验。
数据总量就那么多,如果我们在test data上做模型参数选择,又用它做效果评估,显然不是那么合理(因为我们的模型参数很有可能是在test data上过拟合的,不能很公正地评估结果)。所以我们通常会把训练数据分为两个部分,一大部分作为训练用,另外一部分就是所谓的cross validation数据集,用来进行模型参数选择的。比如说我们有50000训练图片,我们可以把它分为49000的训练集和1000的交叉验证集。
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
这里提一个在很多地方会看到的概念,叫做k-fold cross-validation,意思其实就是把原始数据分成k份,轮流使用其中k-1份作为训练数据,而剩余的1份作为交叉验证数据(因此其实对于k-fold cross-validation我们会得到k个accuracy)。以下是5-fold cross-validation的一个示例:

以下是我们使用5-fold cross-validation,取不同的k值时,得到的accuracy曲线(补充一下,因为是5-fold cross-validation,所以在每个k值上有5个取值,我们取其均值作为此时的准确度)
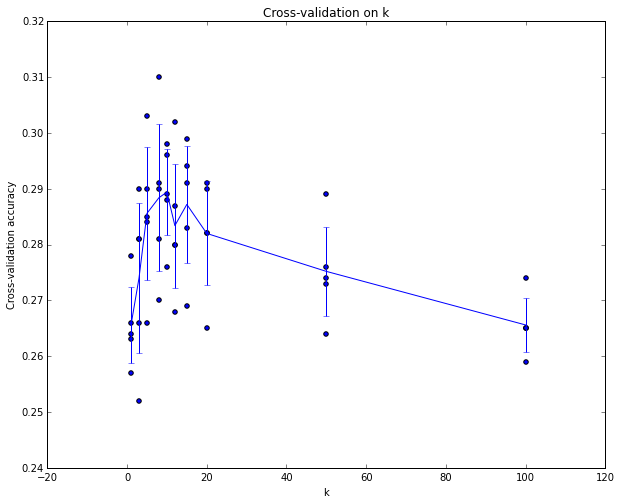
可以看出大概在k=7左右有最佳的准确度。
3.2 最近邻方法的优缺点
K最近邻的优点大家都看出来了,思路非常简单清晰,而且完全不需要训练…不过也正因为如此,最后的predict过程非常耗时,因为要和全部训练集中的图片比对一遍。
实际应用中,我们其实更加关心实施predict所消耗的时间,如果有一个图像识别app返回结果要半小时一小时,你一定第一时间把它卸了。我们反倒不那么在乎训练时长,训练时间稍微长一点没关系,只要最后应用的时候识别速度快效果好,就很赞。后面会提到的深度神经网络就是这样,深度神经网络解决图像问题时训练是一个相对耗时间的过程,但是识别的过程非常快。
另外,不得不多说一句的是,优化计算K最近邻时间问题,实际上依旧到现在都是一个非常热门的问题。Approximate Nearest Neighbor (ANN)算法是牺牲掉一小部分的准确度,而提高很大程度的速度,能比较快地找到近似的K最近邻,现在已经有很多这样的库,比如说FLANN.
最后,我们用一张图来说明一下,用图片像素级别的距离来实现图像类别识别,有其不足之处,我们用一个叫做t-SNE的技术把CIFAR-10的所有图片按两个维度平铺出来,靠得越近的图片表示其像素级别的距离越接近。然而我们瞄一眼,发现,其实靠得最近的并不一定是同类别的。
![]()
其实观察一下,你就会发现,像素级别接近的图片,在整张图的颜色分布上,有很大的共性,然而在图像内容上,有时候也只能无奈地呵呵嗒,毕竟颜色分布相同的不同物体也是非常多的。
- 最近邻分类器(Nearest Neighbor Classifier)
- k-Nearest Neighbor-最近邻分类算法
- Nearest-Neighbor Classifier紧邻算法分类器(一)
- kNN:k-nearest neighbor classification(K最近邻分类算法,KNN)
- 2-1 最近邻规则分类(K-Nearest Neighbor)KNN算法
- 最简单的分类器(nearest neighbor )
- 近似最近邻搜索ANN(Approximate Nearest Neighbor)
- K最近邻(KNN,k-Nearest Neighbor)准确理解
- k-最近邻聚类k-Nearest Neighbor
- kNN分类器 (k nearest neighborhood classifier)
- Cs231n学习笔记:Nearest Neighbor分类器
- K-Nearest Neighbor Classifier (邻近算法)
- 【cs231n】assignment1 :k-Nearest Neighbor classifier
- kNN(K-Nearest Neighbor)最邻近规则分类
- kNN(K-Nearest Neighbor)最邻近规则分类
- kNN(K-Nearest Neighbor)最邻近规则分类
- kNN(K-Nearest Neighbor)最邻近规则分类
- kNN(K-Nearest Neighbor)最邻近规则分类
- AspectJ切点语法定义
- HTML之我的第一个页面设计
- 通用时间格式化
- 移动端常见bug(5)
- [ArcPy] Excel转shp文件 Python解析Excel ArcPy创建要素类并保存
- 最近邻分类器(Nearest Neighbor Classifier)
- SMOJ 2019 歌词 (AC自动机)
- 子类对象调用父类方法包含子类覆盖的方法
- Linux命令行及文件练习题
- 神器!!!简单一步就可以实现雷达图
- 指令系统的寻址方式大致汇总
- LeetCode Count and Say(java)
- 迭代求根
- 96. Unique Binary Search Trees


