2017 ACM-ICPC 亚洲区(南宁赛区)网络赛 GSM Base Station Identification 线性变换||计算几何
来源:互联网 发布:查看手机支持网络制式 编辑:程序博客网 时间:2024/06/15 22:53
题目链接
In the Personal Communication Service systems such as GSM (Global System for Mobile Communications), there are typically a number of base stations spreading around the service area. The base stations are arranged in a cellular structure, as shown in the following figure. In each cell, the base station is located at the center of the cell.
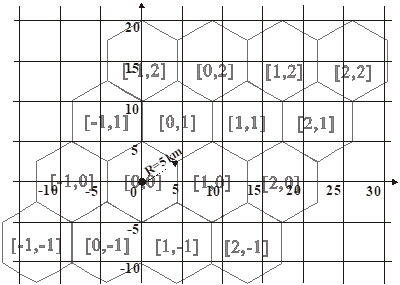
For convenience, each cell is denoted by [i, j]. The cell covers the origin is denoted by [0, 0]. The cell in the east of [0, 0] is denoted by [1, 0]. The cell in the west of [0, 0] is denoted by [−1, 0]. The cell in the northeast of [0, 0] is denoted by [0, 1]. The cell in the southwest of [0, 0] is denoted by [0, −1]. This notation can be easily generalized, as shown in the above figure.
Now the question is as follows. We have a service area represented by a Euclidean plane (i.e., x−y plane). Each unit is 1 Km. For example, point (5, 0) in the plane means the location at a distance of 5 Km to the east of the origin. We assume that there are totally 400 cells, denoted by [i, j], i = −9 ... 10, j = −9 ... 10. The base station of cell [0, 0] is located at the origin of the Euclidean plane. Each cell has a radius of R = 5 Km, as shown in the following figure.
You are given an input (x, y), which indicates a mobile phone’s location. And you need to determine the cell [i,j] that covers this mobile phone and can serve this phone call.
For example, given a location (10, 0), your program needs to output the cell [1, 0], which can cover this location. Specifically, the input and output are:
- input = (x, y). hhis is a location on the Euclidean plane. This value will not exceed the service area covered by the 400 cells. That is, you do not need to handle the exceptional case that the input is out of the boundary of the service area.
- output = [i, j]. One of the 400 cells that covers location [i, j]
Input Format
A list of 10 locations.
Output Format
A list of 10 cells covering the above 10 locations in the correct order.
Please be reminded that there exist a space between coordinates.
样例输入
1 00 152 013 75 510 1525 15-13 -812 -7-10 0
样例输出
[0,0], [-1,2], [0,0], [1,1], [0,1], [0,2], [2,2], [-1,-1], [2,-1], [-1,0]
题目来源
2017 ACM-ICPC 亚洲区(南宁赛区)网络赛
题意:有一个坐标系,每格的长度是5,然后在这个坐标系中有许多边长为5的正六边形,这些正六边形互相连接,没有空隙,每个正六边形都有一个自己的坐标,原点处的正六边形坐标是[0,0],然后每往右一个横坐标+1,每往左一个横坐标-1。然后右上方的纵坐标+1,左下方的纵坐标-1。这样每个正六边形都有属于自己的不同的坐标。现在给你一个坐标系中的坐标,问这个坐标所在的正六边形的坐标是多少。
思路:
所谓线性变换:通俗的理解就是,A集合中的每一个元素,经过某种规则变换,总有非空集合B中一个确定元素和他对应.
那么关于这个题目,我们对于每个正六边形的坐标需要映射到在整个坐标系(集合B中的坐标)的坐标(正六边形的中心).
通过上图可以很简单的算出: 正六边形中心(ox,oy)。
ox=5*sqrt(3)*i+2.5*sqrt(3)*j
oy=7.5*j。
知道这个坐标,因为最多400个多边形,我们可以枚举每个多边形,判断给定点在不在多边形内(直接判断中心到给定
点的距离即可)。
#include<bits/stdc++.h>using namespace std;const double base = sqrt(3.0);const int maxn = 10+5;bool judge(double x,double y,double xx,double yy){double dis = (x - xx)*(x - xx) + (y - yy)*(y - yy);if(dis <= 25)return 1;return 0;}void solve(double x,double y){for(int i = -9;i <= 10;++i){for(int j = -9;j <= 10;++j){double ox = 5*base*i+2.5*base*j;double oy = 7.5*j;if(judge(x,y,ox,oy))printf("[%d,%d]",i,j);}}}int main(){double x,y;for(int _ = 1;_ <= 10;_++){scanf("%lf %lf",&x,&y);solve(x,y);if(_ != 10)printf(", ");elseputs("");}return 0;}当然,麻烦一点的做法是用计算几何模板,还是要算出中心坐标,进而得到正六边形的六个顶点坐标,然后套模板判断关系.
/*射线法:判断一个点是在多边形内部,边上还是在外部,时间复杂度为O(n);射线法可以正确用于凹多边形;射线法是使用最广泛的算法,这是由于相比较其他算法而言,它不但可以正确使用在凹多边形上,而且不需要考虑精度误差问题。该算法思想是从点出发向右水平做一条射线,计算该射线与多边形的边的相交点个数,当点不在多边形边上时,如果是奇数,那么点就一定在多边形内部,否则,在外部。*/#include <stdio.h>#include <algorithm>#include <cstring>#include <cmath>using namespace std;const int N = 2010;const double eps = 1e-10;const int INF = 0x3f3f3f3f;//////////////////////////////////////////////////////////////////struct point{ double x, y; point(double x=0, double y=0) : x(x), y(y){} friend point operator - (const point& p1, const point& p2) { return point(p1.x-p2.x, p1.y-p2.y); } friend double operator ^ (const point& p1, const point& p2) { return p1.x*p2.y - p1.y*p2.x; }};//////////////////////////////////////////////////////////////////struct Segment{ point s, e;};/////////////////////////////////////////////////////////////////////判断一个double类型的数是 0 <0 >0;int Sign(double x){ if( fabs(x) < eps )return 0; if(x > 0)return 1; return -1;}/////////////////////////////////////////////////////////////////////判断o在ab的哪边;0:o在直线ab上; >0:在左边; <0:在右边;double cross(point o, point a, point b){ return ((a-o)^(b-o));}/////////////////////////////////////////////////////////////////////已知abc三点在一条直线上,判断点a是否在线段bc之间;<=0:在 >0:不在;int Between(point a, point b, point c){ if(fabs(b.x-c.x) > fabs(b.y-c.y)) return Sign(min(b.x, c.x)-a.x)*Sign(max(b.x, c.x)-a.x); else return Sign(min(b.y, c.y)-a.y)*Sign(max(b.y, c.y)-a.y);}/////////////////////////////////////////////////////////////////////判断点p0和线段S上,<=0:在,1:不在;int PointOnSegment(point p0, Segment S){ if(Sign(cross(S.s, S.e, p0)) == 0) return Between(p0, S.s, S.e); return 1;}/////////////////////////////////////////////////////////////////////求线段a和线段b的交点个数;int SegmentCross(Segment a, Segment b){ double x1 = cross(a.s, a.e, b.s); double x2 = cross(a.s, a.e, b.e); double x3 = cross(b.s, b.e, a.s); double x4 = cross(b.s, b.e, a.e); if(Sign(x1*x2)<0 && Sign(x3*x4)<0) return 1; if((Sign(x1)==0 && Between(b.s, a.s, a.e)<=0) || (Sign(x2)==0 && Between(b.e, a.s, a.e)<=0) || (Sign(x3)==0 && Between(a.s, b.s, b.e)<=0) || (Sign(x4)==0 && Between(a.e, b.s, b.e)<=0)) return 2; return 0;}/////////////////////////////////////////////////////////////////////判断点p0与含有n个节点的多边形的位置关系,p数组是顶点集合;///返回0:边上或顶点上, 1:外面, -1:里面;int PointInPolygon(point p0, point p[], int n){ Segment L, S; point temp; L.s = p0, L.e = point(INF, p0.y);///以p0为起点的射线L; int counts = 0; p[n] = p[0]; for(int i=1; i<=n; i++) { S.s = p[i-1], S.e = p[i]; if(PointOnSegment(p0, S) <= 0) return 0; if(S.s.y == S.e.y) continue;///和射线平行; if(S.s.y > S.e.y) temp = S.s; else temp = S.e; if(PointOnSegment(temp, L) == -1) counts ++; else if(SegmentCross(L, S) == 1) counts ++; } if(counts%2) return -1; return 1;}void find(int x, int y, int &X, int &Y) { double ox, oy; point pp[7]; for (int i = -9; i <= 10; i++) for (int j = -9; j <= 10; j++) { oy = 7.5*j; ox = 5 * sqrt(3)*i + j*2.5*sqrt(3); pp[0].x = ox; pp[0].y = oy + 5; pp[1].x = ox + 2.5*sqrt(3); pp[1].y = oy + 2.5; pp[2].x = ox + 2.5*sqrt(3); pp[2].y = oy - 2.5; pp[3].x = ox; pp[3].y = oy - 5; pp[4].x = ox - 2.5*sqrt(3); pp[4].y = oy + 2.5; pp[5].x = ox - 2.5*sqrt(3); pp[5].y = oy - 2.5; if (PointInPolygon(point(x,y),pp,6) <= 0) { X = i; Y = j; return; } } } int main() { int x, y; int X, Y; scanf("%d%d", &x, &y); find(x, y, X, Y); printf("[%d,%d]", X, Y); for (int i = 2; i <= 10; i++) { scanf("%d%d", &x, &y); find(x, y, X, Y); printf(", [%d,%d]", X, Y); } printf("\n"); } - 2017 ACM-ICPC 亚洲区(南宁赛区)网络赛 GSM Base Station Identification 线性变换||计算几何
- 2017 ACM-ICPC 亚洲区(南宁赛区)网络赛-I-GSM Base Station Identification(线性变换)
- 2017 ACM-ICPC 亚洲区(南宁赛区)网络赛 I GSM Base Station Identification(暴力,计算几何)
- 2017 ACM-ICPC 亚洲区(南宁赛区)网络赛 I.GSM Base Station Identification
- 2017 ACM-ICPC南宁网络赛: I. GSM Base Station Identification(线性变换)
- 2017 ACM-ICPC 亚洲区(南宁赛区)网络赛
- 2017 ACM-ICPC 亚洲区(南宁赛区)网络赛
- 2017 ACM-ICPC GSM Base Station Identification
- 2017南宁网络赛 I. GSM Base Station Identification 暴力
- 2017 ACM-ICPC 亚洲区(南宁赛区)网络赛
- 2017 ACM-ICPC 亚洲区(南宁赛区)网络赛 G. Finding the Radius for an Inserted Circle(计算几何,二分)
- Finding the Radius for an Inserted Circle 公式/几何 2017 ACM-ICPC 亚洲区(南宁赛区)网络赛
- ACM 2017 ACM-ICPC 亚洲区(南宁赛区)网络赛 B. Train Seats Reservation
- 2017 ACM-ICPC 亚洲区(南宁赛区)网络赛 B.Train Seats Reservation(模拟)
- 2017 ACM-ICPC 亚洲区(南宁赛区)网络赛 F. Overlapping Rectangles(扫描线)
- 2017 ACM-ICPC 亚洲区(南宁赛区)网络赛: F. Overlapping Rectangles(线段树)
- 2017 ACM-ICPC 亚洲区(南宁赛区)网络赛 F. Overlapping Rectangles(面积并)
- 2017 ACM-ICPC 亚洲区(南宁赛区)网络赛 A. Weather Patterns(阅读题)
- qbxt Day 6 搜索+乱搞+差分约束
- Spring面向切面编程——什么是面向切面编程
- 《着色器和屏幕特效》读书笔记第八章-用Unity的渲染纹理实现屏幕特效
- lua_func.hpp
- sort总结
- 2017 ACM-ICPC 亚洲区(南宁赛区)网络赛 GSM Base Station Identification 线性变换||计算几何
- 第一次写博客
- VTK学习(三)VTK读取序列图像
- Perfect Number
- 学习Docker(2017-10-6)
- windows主机,ubuntu16.04虚拟机,x210开发板的网络纠结
- Apache Cassandra3.X 系列,第 1 部分 Cassnadra3.X 特性概述
- 拉格朗日插值法 【NOIP2017提高A组模拟10.6】Count
- HDU 4784 DP


