STm32驱动74HC595引脚图时序图工作原理
来源:互联网 发布:网络安全法规定 编辑:程序博客网 时间:2024/04/30 13:41
74HC595和74hc164一样是在单片机系统中常用的芯片之一他的作用就是把串行的信号转为并行的信号,常用在各种数码管以及点阵屏的驱动芯片, 使用74HC595可以节约单片机mcu的io口资源,用3个io就可以控制8个数码管的引脚,他还具有一定的驱动能力,可以免掉三极管等放大电路,所以这块芯片是驱动数码管的神器.应用非常广泛,点这里可以下载完整的74HC595中文资料:http://www.51hei.com/f/74HC595中文资料.pdf
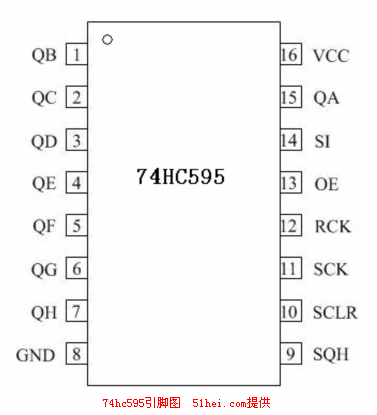
74HC595引脚图
74HC595管脚功能
下面我来介绍一下 74HC595工作原理:
74HC595的数据端:
QA--QH: 八位并行输出端,可以直接控制数码管的8个段。
QH': 级联输出端。我将它接下一个595的SI端。
SI: 串行数据输入端。
74hc595的控制端说明:
/SCLR(10脚): 低电平时将移位寄存器的数据清零。通常我将它接Vcc。
SCK(11脚):上升沿时数据寄存器的数据移位。QA-->QB-->QC-->...-->QH;下降沿移位寄存器数据不变。(脉冲宽度:5V时,大于几十纳秒就行了。我通常都选微秒级)
控制移位寄存器
SCK 上升沿 数据 移位 SCK 下降沿 数据 保持
RCK(12脚):上升沿时移位寄存器的数据进入存储寄存器,下降沿时存储寄存器数据不变。通常我将RCK置为低电平,当移位结束后,在RCK端产生一个正脉冲(5V时,大于几十纳秒就行了。我通常都选微秒级),更新显示数据。
控制存储寄存器
RCK 上升沿 移位寄存器 的 数据进入 存储寄存器 RCK 下降沿 存储寄存器数据不变
/G(13脚): 高电平时禁止输出(高阻态)。如果单片机的引脚不紧张,用一个引脚控制它,可以方便地产生闪烁和熄灭效果。比通过数据端移位控制要省时省力。
注:74164和74595功能相仿,都是8位串行输入转并行输出移位寄存器。74164的驱动电流(25mA)比74595(35mA)的要小,14脚封装,体积也小一些。
74595的主要优点是具有数据存储寄存器,在移位的过程中,输出端的数据可以保持不变。这在串行速度慢的场合很有用处,数码管没有闪烁感。
与74hc164只有数据清零端相比,74hc595还多有输出端时能/禁止控制端oe,可以使输出为高阻态。所以是用这块芯片会更方便
74HC595是具有8位移位寄存器和一个存储器,三态输出功能。 移位寄存器和存储器是分别的时钟。数据在SHcp(见时序图)的上升沿输入,在STcp(见时序图)的上升沿进入的存储寄存器中去。如果两个时钟连在一起,则移位
寄存器总是比存储寄存器早一个脉冲。移位寄存器有一个串行移位输入(Ds),和一个串行输出
(Q7’),和一个异步的低电平复位,存储寄存器有一个并行8位的,具备三态的总线输出,当使
能 OE时(为低电平),存储寄存器的数据输出到总线。
这里有单片机驱动74hc595的方法:http://www.51hei.com/chip/1799.html
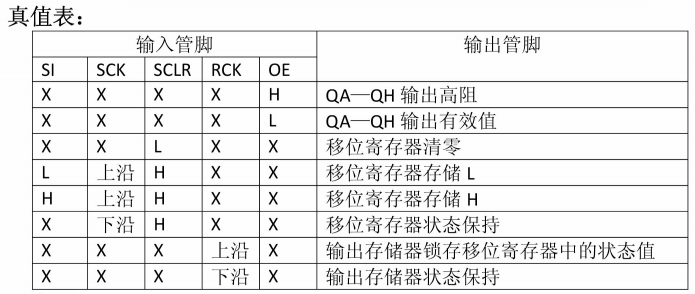
74HC595真值表
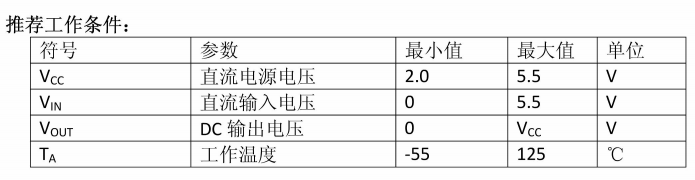
74hc595最高电压和最低电压
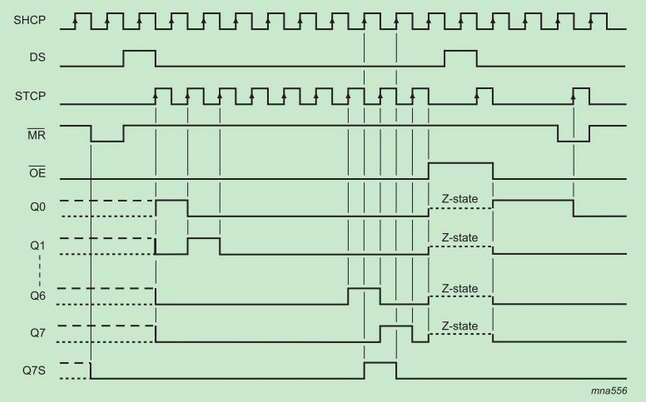
74HC595时序图 
74HC595逻辑图
74HC595和74HC164的区别主要有:
1、74HC595有锁存器,所以在移位过程中输出可以保持不变;而74HC164没有锁存器,所以每产生一个移位时钟输出就改变一次。这是二者的最大区别
2、74HC595使用专门的Q7'引脚实现多片级联;74HC164直接使用输出引脚Q7级联
3、74HC595有使能OE,OE无效时输出引脚为高阻态;而74HC164没有使能引脚
4、74HC595的复位是针对移位寄存器的,想要复位LATCH寄存器还须ST_CP上升沿将移位寄存器内容加载到锁存寄存器;也就是说:74HC595的复位是同步的,74HC164的复位是异步的,所以74HC164的复位更简单
5、74HC164有对应的74HC165并转串芯片
74HC595.c------------------------------------------------------------------------------------------------------------------------------------------------------ #include "stm32f10x.h"#include "stm32f10x_rcc.h"#include "stm32f10x_gpio.h"#include "74HC595.h"/* 延时模块82615468 sp-320-12 * */static void delay(u32 t){u32 i;while(t--)for (i = 0; i < 1; i++);}void HC595Init(void){GPIO_InitTypeDef GPIO_InitStructure;RCC_APB2PeriphClockCmd(HC595_CLK_GPIO_CLK | HC595_DATA_GPIO_CLK | HC595_CS_GPIO_CLK, ENABLE);GPIO_InitStructure.GPIO_Pin = HC595_CLK_PIN;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_2MHz;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;GPIO_Init(HC595_CLK_GPIO, &GPIO_InitStructure);GPIO_InitStructure.GPIO_Pin = HC595_DATA_PIN;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_2MHz;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;GPIO_Init(HC595_DATA_GPIO, &GPIO_InitStructure);GPIO_InitStructure.GPIO_Pin = HC595_CS_PIN;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_2MHz;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;GPIO_Init(HC595_CS_GPIO, &GPIO_InitStructure);HC595_CLK_H();HC595_DATA_H();HC595_CS_H();}void HC595Send(u8 data){ u8 j; for (j = 8; j > 0; j--){ if(data & 0x80) HC595_DATA_H();elseHC595_DATA_L(); HC595_CLK_L(); //上升沿发生移位delay(1); data <<= 1; HC595_CLK_H();delay(1); }//HC595Load();}void HC595Load(void){HC595_CS_L();HC595_CS_H();}/*void LedRowOn(u8 Row7_0, u8 Row15_8, u8 Row16_23,u8 Row31_24){HC595Send(Row15_8);HC595Send(Row7_0);HC595Send(Row31_24);HC595Send(Row16_23);HC595Load();}*/void LedRowOut(u32 Data){HC595Send(Data >> 24);HC595Send(Data >> 16);HC595Send(Data >> 8);HC595Send(Data >> 0);HC595Load();}//end of file74HC595.h
#ifndef __74HC595_H__ #define __74HC595_H__ #define HC595_CLK_PIN GPIO_Pin_6 #define HC595_CLK_GPIO GPIOA #define HC595_CLK_GPIO_CLK RCC_APB2Periph_GPIOA #define HC595_CLK_H() GPIOA->BSRR = HC595_CLK_PIN #define HC595_CLK_L() GPIOA->BRR = HC595_CLK_PIN #define HC595_CS_PIN GPIO_Pin_7 #define HC595_CS_GPIO GPIOA #define HC595_CS_GPIO_CLK RCC_APB2Periph_GPIOA #define HC595_CS_H() GPIOA->BSRR = HC595_CS_PIN #define HC595_CS_L() GPIOA->BRR = HC595_CS_PIN #define HC595_DATA_PIN GPIO_Pin_10 #define HC595_DATA_GPIO GPIOE #define HC595_DATA_GPIO_CLK RCC_APB2Periph_GPIOE #define HC595_DATA_H() GPIOE->BSRR = HC595_DATA_PIN #define HC595_DATA_L() GPIOE->BRR = HC595_DATA_PIN void HC595Send(u8 data); void HC595Init(void); void HC595Load(void); void LedRowOn(u8 Row7_0, u8 Row15_8, u8 Row16_23,u8 Row31_24); void LedRowOut(u32 Data); #endif
阅读全文
0 0
- STm32驱动74HC595引脚图时序图工作原理
- 74HC595引脚图时序图工作原理及pdf中文资料lsh
- 74HC595引脚图时序图工作原理及pdf中文资料
- STM32 控制74HC595 驱动点阵 文字能移动
- [转载]74HC595驱动
- 74HC595驱动数码管
- 74HC595 驱动代码
- 74ls192/74ls193中文资料介绍-引脚图-真值表-工作原理
- 单片机驱动74hc595使用方法
- LCD工作原理 驱动之LCD 上电时序
- 12位二进制异步计数器74HC4040引脚图,功能及时序图简介
- 74HC595 for STM32 源代码【worldsing笔记】
- tomcat工作流程时序图
- 74HC595单片机C51驱动(源程序)
- 基于s3c6410的74hc595驱动
- 51单片机利用74HC595驱动数码管
- linux驱动实例之74HC595
- STM32 软件模拟SPI时序驱动NRF24L01
- CentOS 无法识别NTFS格式U盘的解决方法
- 当共享单车遇上窄带物联网 开锁速度将提高3倍
- 如何解决H5中获取相机与图片,在苹果手机获取不了文件选择图片的问题
- python小技巧
- python错误处理记录完整的异常堆栈信息
- STm32驱动74HC595引脚图时序图工作原理
- Mybatis传入多个参数和${}与#{}的区别
- 蓝桥杯斐波拉切数列踩过的坑
- ngnix配置
- javascript定义个json对象
- 借工业物联网融合IT与OT 驱动制造服务化转型
- 在express 模板引擎的路由中加载socket.io
- 【Cocos2d-x游戏开发lua篇之基础】加载图片与设置按钮监听事件
- java的变量和常量以及常量池


