用双边滤波图像平滑
来源:互联网 发布:淘宝搜索指数查询 编辑:程序博客网 时间:2024/06/05 18:56
算法
双边滤波(Bilateral filter)是非线性滤波,是一种可以保边去噪的滤波器。之所以可以达到此去噪效果,是因为滤波器是由两个函数构成。一个函数是由几何空间距离决定滤波器系数。另一个由像素差值决定滤波器系数。
双边滤波器中,输出像素的值依赖于邻域像素的值的加权组合,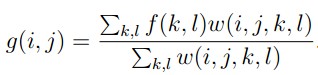
权重系数w(i,j,k,l)取决于定义域核
和值域核
的乘积
同时考虑了空间域与值域的差别,而Gaussian Filter和α均值滤波分别只考虑了空间域和值域差别。
函数
void bilateralFilter(InputArray src, OutputArraydst, int d, double sigmaColor, double sigmaSpace, int borderType=BORDER_DEFAULT)
第一个参数,InputArray类型的src,输入图像,即源图像,需要为8位或者浮点型单通道、三通道的图像。
第二个参数,OutputArray类型的dst,即目标图像,需要和源图片有一样的尺寸和类型。
第三个参数,int类型的d,表示在过滤过程中每个像素邻域的直径。如果这个值我们设其为非正数,那么OpenCV会从第五个参数sigmaSpace来计算出它来。
第四个参数,double类型的sigmaColor,颜色空间滤波器的sigma值。这个参数的值越大,就表明该像素邻域内有更宽广的颜色会被混合到一起,产生较大的半相等颜色区域。
第五个参数,double类型的sigmaSpace坐标空间中滤波器的sigma值,坐标空间的标注方差。他的数值越大,意味着越远的像素会相互影响,从而使更大的区域足够相似的颜色获取相同的颜色。当d>0,d指定了邻域大小且与sigmaSpace无关。否则,d正比于sigmaSpace。
第六个参数,int类型的borderType,用于推断图像外部像素的某种边界模式。注意它有默认值BORDER_DEFAULT。
源码
亲测,这个耗时很久。对整张图片做平滑之前还是要一些处理。加掩膜?用开闭运算?
#include "opencv2/highgui/highgui.hpp"#include <opencv2/opencv.hpp>#include "opencv2/imgproc/imgproc.hpp"#include <iostream>using namespace std;using namespace cv;#define WINDOW_NAME "Contrast"const int g_nMaxA = 100;int sigmaColor;int sigmaSpace;Mat g_srcImage1(Scalar(0,0,0));Mat g_srcImage2(Scalar(0,0,0));Mat g_dstImage(Scalar(0,0,0));//定义像素值系数的控制条void on_TrackbarColor(int, void*){ //让两张图线性融合(并不是要这个功能啊!) //addWeighted(g_srcImage1, g_dAvalue, g_srcImage2, g_dBvalue, 0.0, g_dstImage); /* 第一个参数,InputArray类型的src,输入图像,即源图像,需要为8位或者浮点型单通道、三通道的图像。 第二个参数,OutputArray类型的dst,即目标图像,需要和源图片有一样的尺寸和类型。 第三个参数,int类型的d,表示在过滤过程中每个像素邻域的直径。如果这个值我们设其为非正数,那么OpenCV会从第五个参数sigmaSpace来计算出它来。 第四个参数,double类型的sigmaColor,颜色空间滤波器的sigma值。这个参数的值越大,就表明该像素邻域内有更宽广的颜色会被混合到一起,产生较大的半相等颜色区域。 第五个参数,double类型的sigmaSpace坐标空间中滤波器的sigma值,坐标空间的标注方差。他的数值越大,意味着越远的像素会相互影响,从而使更大的区域足够相似的颜色获取相同的颜色。 当d>0,d指定了邻域大小且与sigmaSpace无关。否则,d正比于sigmaSpace。 第六个参数,int类型的borderType,用于推断图像外部像素的某种边界模式。注意它有默认值BORDER_DEFAULT。 */ bilateralFilter(g_srcImage1, g_dstImage, -1, sigmaColor, sigmaSpace, BORDER_DEFAULT); imshow(WINDOW_NAME, g_dstImage); waitKey(1);}//定义空间位置系数的控制条void on_TrackbarSpace(int, void*){ //让两张图线性融合(并不是要这个功能啊!) //addWeighted(g_srcImage1, g_dAvalue, g_srcImage2, g_dBvalue, 0.0, g_dstImage); /* 第一个参数,InputArray类型的src,输入图像,即源图像,需要为8位或者浮点型单通道、三通道的图像。 第二个参数,OutputArray类型的dst,即目标图像,需要和源图片有一样的尺寸和类型。 第三个参数,int类型的d,表示在过滤过程中每个像素邻域的直径。如果这个值我们设其为非正数,那么OpenCV会从第五个参数sigmaSpace来计算出它来。 第四个参数,double类型的sigmaColor,颜色空间滤波器的sigma值。这个参数的值越大,就表明该像素邻域内有更宽广的颜色会被混合到一起,产生较大的半相等颜色区域。 第五个参数,double类型的sigmaSpace坐标空间中滤波器的sigma值,坐标空间的标注方差。他的数值越大,意味着越远的像素会相互影响,从而使更大的区域足够相似的颜色获取相同的颜色。 当d>0,d指定了邻域大小且与sigmaSpace无关。否则,d正比于sigmaSpace。 第六个参数,int类型的borderType,用于推断图像外部像素的某种边界模式。注意它有默认值BORDER_DEFAULT。 */ bilateralFilter(g_srcImage1, g_dstImage, -1, sigmaSpace, sigmaSpace, BORDER_DEFAULT); imshow(WINDOW_NAME, g_dstImage); waitKey(1);}int main(int argc, char** argv){ g_srcImage1 = imread("newme.jpeg");//984 × 738 //g_srcImage2 = imread("../view.jpeg");//1200 x 800 //Rect rect(int(g_srcImage2.cols-g_srcImage1.cols)/2, 0, g_srcImage1.cols, g_srcImage1.rows); //g_srcImage2 = g_srcImage2(rect); if(!g_srcImage1.data){ cout<<"read error"<<endl; } sigmaColor = 4; sigmaSpace = 4; namedWindow(WINDOW_NAME, WINDOW_AUTOSIZE); char TrackbarNameColor[50]; sprintf(TrackbarNameColor, "of Color Value: %d", sigmaColor); //建立响应 createTrackbar(TrackbarNameColor, WINDOW_NAME, &sigmaColor, g_nMaxA, on_TrackbarColor); on_TrackbarColor(sigmaColor, 0); char TrackbarNameSpace[50]; sprintf(TrackbarNameSpace, "of Space value: %d", sigmaSpace); createTrackbar(TrackbarNameSpace, WINDOW_NAME, &sigmaSpace, g_nMaxA, on_TrackbarSpace); on_TrackbarSpace(sigmaSpace, 0); waitKey(0); return 0;}阅读全文
0 0
- 用双边滤波图像平滑
- 图像平滑处理(归一化块滤波、高斯滤波、中值滤波、双边滤波)
- 图像平滑处理(归一化块滤波、高斯滤波、中值滤波、双边滤波)
- 图像平滑处理(归一化块滤波、高斯滤波、中值滤波、双边滤波)
- 图像处理平滑处理--高斯滤波,简单模糊,中值模糊,双边滤波,简单无放缩变换
- 【拜小白opencv】34-图像平滑处理,6种滤波总结的综合示例【盒式滤波、均值滤波、高斯滤波、中值滤波、双边滤波、导向滤波】
- 图像平滑技术之盒滤波、均值滤波、中值滤波、高斯滤波、双边滤波的原理概要及OpenCV代码实现
- 灰度图像双边滤波代码
- 图像处理-双边滤波原理
- 图像平滑、滤波、模糊
- 图像滤波---双边滤波和引导滤波的基本原理
- 图像平滑处理(滤波)
- OpenCV GaussianBlur() 图像平滑滤波
- 图像算法之十一:双边滤波
- 图像双边滤波及时间优化
- 图像处理 图像平滑、滤波、卷积
- 双边滤波
- 双边滤波
- CSV文件导入Neo4j数据库
- 自定义评星条
- leetcode 83|84. Remove Duplicates from Sorted List 1|2
- 小程序 ajax请求封装
- cnn
- 用双边滤波图像平滑
- Java笔记3
- 实验5-5
- CentOS 7 中 Docker 的安装
- 14期 12月期刊自荐
- JavaScript 动画之图片淡入淡出
- HTTP协议详解
- 创投日报:11月23日收录投融资项目10起
- 常用的滑动、隐藏、定位等CSS样式


