ROS Navigation的costmap_2d类继承关系与实现方法
来源:互联网 发布:社会法则 知乎 编辑:程序博客网 时间:2024/05/16 18:59
costmap_2d
costmap的计算
costmap表示的是地图中栅格的cost,cost的计算方法是: 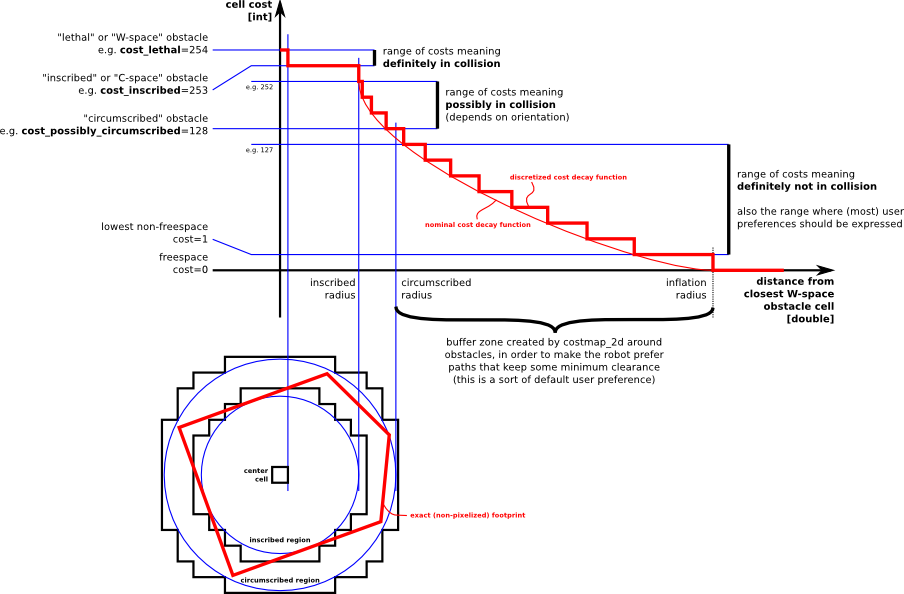
上图将地图中栅格的cost分为五部分,其中红色多边形表示机器人的轮廓:
(1) Lethal (致命的):机器人的中心与该网格的中心重合,此时机器人必然与障碍物冲突。
(2) Inscribed(内切圆):网格的外切圆与机器人的轮廓内切,此时机器人也必然与障碍物冲突。
(3) Possibly circumscribed(外切圆):栅格与机器人的轮廓外切,此时机器人相当于靠在障碍物附近,所以不一定冲突。
(4) Freespace(自由空间):没有障碍物的空间。
(5) Unknown(未知):未知的空间。
对应的cost的计算:exp(-1.0 * cost_scaling_factor * (distance_from_obstacle - inscribed_radius)) * (costmap_2d::INSCRIBED_INFLATED_OBSTACLE - 1)
// costmap_2d/inflation_layer.h inline unsigned char computeCost(double distance) const { unsigned char cost = 0; if (distance == 0) cost = LETHAL_OBSTACLE; else if (distance * resolution_ <= inscribed_radius_) cost = INSCRIBED_INFLATED_OBSTACLE; //254 else { // make sure cost falls off by Euclidean distance cost 0~255 double euclidean_distance = distance * resolution_; double factor = exp(-1.0 * weight_ * (euclidean_distance - inscribed_radius_)); cost = (unsigned char)((INSCRIBED_INFLATED_OBSTACLE - 1) * factor); } return cost; }costmap由使用的是layeredMap的方式,如下图: 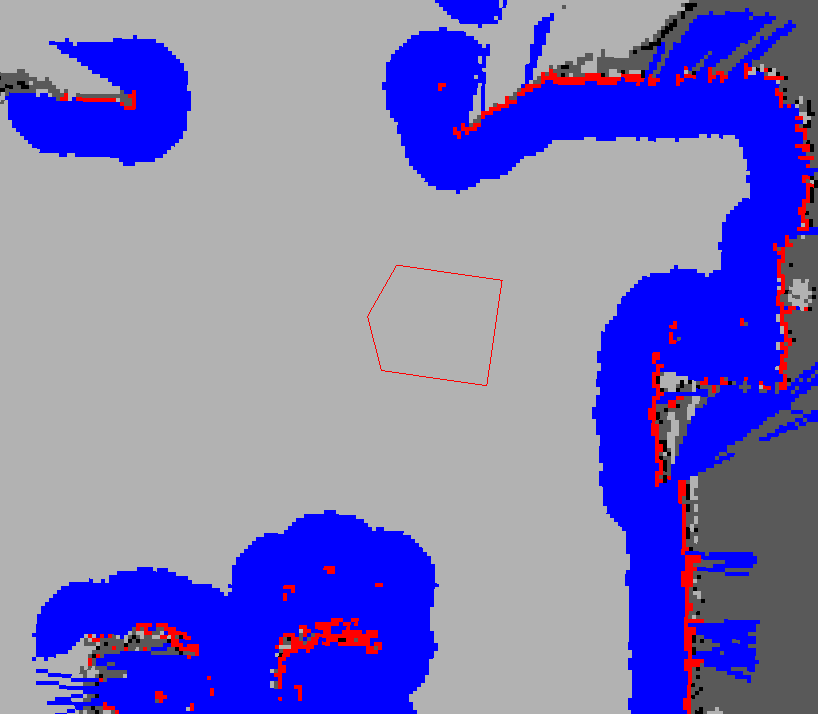
图中红色栅格表示障碍物,绿色表示障碍物根据机器人的内切圆膨胀形成的,红色多边形表示机器人。机器人需要保证机器人的多边形轮廓不与红色栅格区域相交、机器人的中心不到达蓝色膨胀区域。
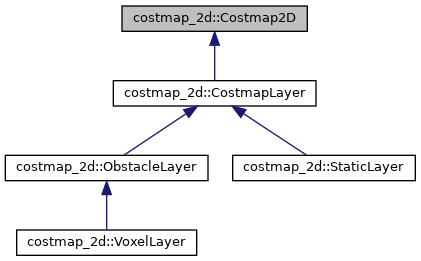
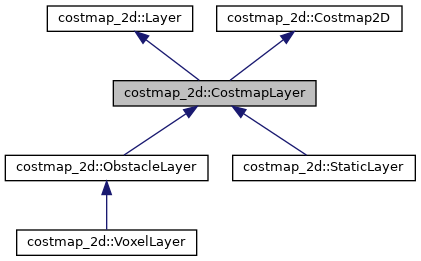
costmap_2d类之间关系
costmap_2d中的类继承关系:
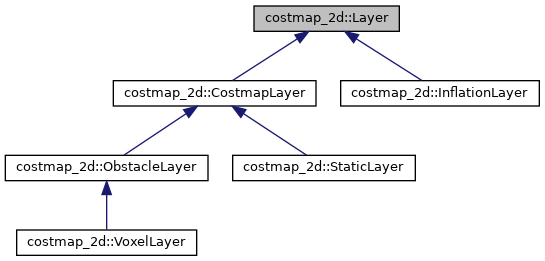
David Lu的《Layered Costmaps for Context-Sensitive Navigation》

move_base中的使用
在move_base的使用中,首先分别定义了planner_costmap_ros_,controller_costmap_ros_分别对应gloabl_costmap,local_costmap,在move_base的构造函数中,初始化这两个对象。这两个对象使用的是costmap_2d包中封装之后的costmap_2d::Costmap2DROS类,在这个类中包含对plugin的载入。分别如下:
move_base中的初始化:move_base/src/move_base.cpp //create the ros wrapper for the planner's costmap... and initializer a pointer we'll use with the underlying map planner_costmap_ros_ = new costmap_2d::Costmap2DROS("global_costmap", tf_); planner_costmap_ros_->pause(); //initialize the global planner try { planner_ = bgp_loader_.createInstance(global_planner); planner_->initialize(bgp_loader_.getName(global_planner), planner_costmap_ros_); } catch (const pluginlib::PluginlibException& ex) { ROS_FATAL("Failed to create the %s planner, are you sure it is properly registered and that the containing library is built? Exception: %s", global_planner.c_str(), ex.what()); exit(1); } //create the ros wrapper for the controller's costmap... and initializer a pointer we'll use with the underlying map controller_costmap_ros_ = new costmap_2d::Costmap2DROS("local_costmap", tf_); controller_costmap_ros_->pause(); //create a local planner try { tc_ = blp_loader_.createInstance(local_planner); ROS_INFO("Created local_planner %s", local_planner.c_str()); tc_->initialize(blp_loader_.getName(local_planner), &tf_, controller_costmap_ros_); } catch (const pluginlib::PluginlibException& ex) { ROS_FATAL("Failed to create the %s planner, are you sure it is properly registered and that the containing library is built? Exception: %s", local_planner.c_str(), ex.what()); exit(1); } // Start actively updating costmaps based on sensor data planner_costmap_ros_->start(); controller_costmap_ros_->start();在costmap2DROS中初始化对象layered_costmap_,然后向其中添加plugin:layered_costmap_->addPlugin(plugin)
// costmap_2d/src/costmap_2d_ros.cpp layered_costmap_ = new LayeredCostmap(global_frame_, rolling_window, track_unknown_space); if (!private_nh.hasParam("plugins")) // load the default configure { //函数 最后一行:nh.setParam("plugins",super_array); super_array是构造的默认plugin //函数 起始一行:ROS_INFO("Loading from pre-hydro paramter sytle"); //也可以看出navigation的设计,是plugin的一种方式 resetOldParameters(private_nh); } if (private_nh.hasParam("plugins")) // load the plugins { XmlRpc::XmlRpcValue my_list; private_nh.getParam("plugins", my_list); for (int32_t i = 0; i < my_list.size(); ++i) { std::string pname = static_cast<std::string>(my_list[i]["name"]); std::string type = static_cast<std::string>(my_list[i]["type"]); ROS_INFO("Using plugin \"%s\"", pname.c_str()); boost::shared_ptr<Layer> plugin = plugin_loader_.createInstance(type); layered_costmap_->addPlugin(plugin); plugin->initialize(layered_costmap_, name + "/" + pname, &tf_); } }完成每一个plugin的初始化之后,每一个地图的updateMap中先后执行updateBounds,updataCosts,updateBounds:这个阶段会更新每个Layer的更新区域,这样在每个运行周期内减少了数据拷贝的操作时间。StaticLayer的Static map只在第一次做更新,Bounds 范围是整张Map的大小,而且在UpdateBounds过程中没有对Static Map层的数据做过任何的更新。ObstacleLayer在这个阶段主要的操作是更新Obstacles Map层的数据,然后更新Bounds。InflationLayer则保持上一次的Bounds。 updateCosts:这个阶段将各层数据逐一拷贝到Master Map,上图中展示了Master Map的产生过程。
void LayeredCostmap::updateMap(double robot_x, double robot_y, double robot_yaw); for (vector<boost::shared_ptr<Layer> >::iterator plugin = plugins_.begin(); plugin != plugins_.end(); ++plugin) { ………… (*plugin)->updateBounds(robot_x, robot_y, robot_yaw, &minx_, &miny_, &maxx_, &maxy_); if (minx_ > prev_minx || miny_ > prev_miny || maxx_ < prev_maxx || maxy_ < prev_maxy) { ROS_WARN_THROTTLE(……); } } ………… ROS_DEBUG("Updating area x: [%d, %d] y: [%d, %d]", x0, xn, y0, yn); if (xn < x0 || yn < y0) return; costmap_.resetMap(x0, y0, xn, yn); for (vector<boost::shared_ptr<Layer> >::iterator plugin = plugins_.begin(); plugin != plugins_.end(); ++plugin) { (*plugin)->updateCosts(costmap_, x0, y0, xn, yn); } ………… initialized_ = true;运用plugins
plugins在costmap中的运用ROS中有介绍Configuring Layered Costmaps,也可以添加一些新的plugin对应新的costmap,比如navigation_layers。
plugins: - {name: static_map, type: "costmap_2d::StaticLayer"} - {name: obstacles, type: "costmap_2d::VoxelLayer"}publish_frequency: 1.0obstacles: observation_sources: base_scan base_scan: {data_type: LaserScan, sensor_frame: /base_laser_link, clearing: true, marking: true, topic: /base_scan}- ROS Navigation的costmap_2d类继承关系与实现方法
- ROS Navigation的base_local_planner类继承关系与实现方法
- ROS Navigation的global_planner类继承关系与实现算法
- ROS Navigation-----costmap_2d简介
- ROS Navigation的move_base类实现方法
- ROS Navigation-----costmap_2d之range_sensor_layer简介
- ROS Navigation-----costmap_2d之social_navigation_layers简介
- ROS Navigation-----costmap_2d之staticmap层简介
- ROS Navigation-----costmap_2d之inflation层简介
- ROS Navigation-----costmap_2d之obstacle层简介
- ROS Navigation-----costmap_2d之创建自定义用户层
- ROS Navigation-----base_local_planner类
- ROS Navigation-----dwa_planner_ros类
- Java 继承 父类变量, 方法 与子类的关系:
- ROS 学习系列 -- 执行turtlebot navigation的方法
- 抽象类与接口之间的继承和实现关系
- java实现接口与继承的关系
- 抽象类的继承与方法实现
- 使用JMeter创建数据库(Mysql)测试
- 【递归练习】算24点
- 修改WampServer的默认端口
- ArrayList的方法:remove(object o) 、remove(int index)、removeAll(Collection c)时间复杂度的比较
- K倍区间
- ROS Navigation的costmap_2d类继承关系与实现方法
- 2016级数据结构结课总结
- Linux-内存-数据结构
- RTC使用野火例程,LSE复位可用,HSE和LSI不可用问题。
- TensorFlow实战——个性化推荐
- 两个数比大小遇到的问题
- 写给自己的JAVA工程师之路-多线程
- 【二、Android Studio UI开发】#171216
- coursera deep learning course3 week1


