BVH文件解析
来源:互联网 发布:开票接口软件 编辑:程序博客网 时间:2024/06/09 13:53
2010-05-14
最近在做计算机动画方面的研究,读取BVH动作文件,从网上找了一些资料,介绍的不全,而且只是简单的介绍了BVH文件的结构,并没有看到BVH文件中每帧数据代表的真正含义。于是乎,自己摸索了许久,终于得到了正确的运动效果。
1、首先介绍一下BVH文件的基本概念,网上这方面的资料还是很多的,我进行了一些总结:
BVH(Biovision层次模型)是Biovision Hierarchy的缩写,它是由Biovision公司开发的一种描述动作捕获的数据文件格式。这种文件描述的人体动画十分逼真,因为它通过真实的人体模特穿上带有传感器的特殊衣服捕获动画。BVH文件来源也相当广泛,且易于制作,它可以利用3DMAX,POSER等软件制作;此外,这种文件是以文本形式存储的,因此操作简单,容易开发。
从计算机编程角度看来,程序员喜欢将很多东西分开对待,从而简化,也就是分而治之。
计算机动画肯定是复杂的,但是总有办法解决,于是动画被分为 蒙皮 & 骨骼动作
bvh文件存放的就是骨骼的构成和动作数据————
BVH是在BVA格式的基础上的改进,在动作捕获后,解析出来的
BVH文件分为2个主要部分:骨架信息 和 数据块
骨架信息 按照层级关系,定义了如root hip leg等位置和旋转分量,从而形成一个完整的骨架
数据块 对应上面的骨架各部位 标出每帧的数据信息
各种类型的动作捕捉仪导出的BVH文件还是有差别的,我是用的是Xsens惯性动作捕捉仪导出的BVH文件。文件基本的结构如下所示:
HIERARCHY
ROOT Hips
{
OFFSET 0.000000 0.000000 0.000000
CHANNELS 6 Xposition Yposition Zposition Yrotation Xrotation Zrotation
JOINT Chest
{
OFFSET 0.000000 9.085309 -0.011154
CHANNELS 3 Yrotation Xrotation Zrotation
JOINT Chest2
{
OFFSET 0.000000 8.950749 0.022763
CHANNELS 3 Yrotation Xrotation Zrotation
JOINT Chest3
{
OFFSET 0.000000 8.911174 0.000000
CHANNELS 3 Yrotation Xrotation Zrotation
JOINT Chest4
{
OFFSET 0.000000 8.902070 0.000000
CHANNELS 3 Yrotation Xrotation Zrotation
JOINT Neck
{
OFFSET 0.000000 13.422772 0.000000
CHANNELS 3 Yrotation Xrotation Zrotation
JOINT Head
{
OFFSET 0.000000 8.338636 0.048151
CHANNELS 3 Yrotation Xrotation Zrotation
End Site
{
OFFSET 0.000000 15.778614 0.025430
}
}
}
JOINT RightCollar
{
OFFSET -2.767708 8.920939 0.000000
CHANNELS 3 Yrotation Xrotation Zrotation
JOINT RightShoulder
{
OFFSET -13.358980 0.000000 0.000000
CHANNELS 3 Yrotation Xrotation Zrotation
JOINT RightElbow
{
OFFSET 0.000000 -29.360726 0.000000
CHANNELS 3 Yrotation Xrotation Zrotation
JOINT RightWrist
{
OFFSET 0.000000 -23.728381 0.000000
CHANNELS 3 Yrotation Xrotation Zrotation
End Site
{
OFFSET 0.000000 -17.517202 0.000000
}
}
}
}
}
JOINT LeftCollar
{
OFFSET 2.767708 8.920939 0.000000
CHANNELS 3 Yrotation Xrotation Zrotation
JOINT LeftShoulder
{
OFFSET 13.358980 0.000000 0.000000
CHANNELS 3 Yrotation Xrotation Zrotation
JOINT LeftElbow
{
OFFSET 0.000000 -29.360726 0.000000
CHANNELS 3 Yrotation Xrotation Zrotation
JOINT LeftWrist
{
OFFSET 0.000000 -23.728381 0.000000
CHANNELS 3 Yrotation Xrotation Zrotation
End Site
{
OFFSET 0.000000 -17.517202 0.000000
}
}
}
}
}
}
}
}
}
JOINT RightHip
{
OFFSET -7.475494 0.055214 0.005577
CHANNELS 3 Yrotation Xrotation Zrotation
JOINT RightKnee
{
OFFSET 0.000000 -38.197352 -0.005333
CHANNELS 3 Yrotation Xrotation Zrotation
JOINT RightAnkle
{
OFFSET 0.000000 -37.100850 -0.009018
CHANNELS 3 Yrotation Xrotation Zrotation
JOINT RightToe
{
OFFSET 0.000000 -9.655660 22.225547
CHANNELS 3 Yrotation Xrotation Zrotation
End Site
{
OFFSET 0.000000 -1.495764 7.116721
}
}
}
}
}
JOINT LeftHip
{
OFFSET 7.475494 0.055214 0.005577
CHANNELS 3 Yrotation Xrotation Zrotation
JOINT LeftKnee
{
OFFSET 0.000000 -38.197352 -0.005333
CHANNELS 3 Yrotation Xrotation Zrotation
JOINT LeftAnkle
{
OFFSET 0.000000 -37.100850 -0.009018
CHANNELS 3 Yrotation Xrotation Zrotation
JOINT LeftToe
{
OFFSET 0.000000 -9.655660 22.225547
CHANNELS 3 Yrotation Xrotation Zrotation
End Site
{
OFFSET 0.000000 -1.495764 7.116721
}
}
}
}
}
}
MOTION
Frames: 1
Frame Time: 0.008333
0.000000 84.730760 0.000000 0.000000 -5.767889 0.000000 0.000000 11.653876 0.000000 0.000000 -5.885988 0.000000 0.000000 -0.000000 0.000000 0.000000 -0.000000 0.000000 0.000000 12.528808 0.000000 0.000000 0.711711 0.000000 0.000000 -0.000000 0.000000 0.000000 0.000000 -90.000000 0.000000 -2.309063 0.000000 0.000000 2.309063 0.000000 0.000000 -0.000000 0.000000 0.000000 -0.000000 90.000000 0.000000 -2.309063 0.000000 0.000000 2.309063 0.000000 0.000000 8.520374 0.000000 0.000000 1.905768 0.000000 -0.000000 -4.658254 0.000000 0.000000 -0.000000 0.000000 0.000000 8.520374 0.000000 0.000000 1.905768 0.000000 -0.000000 -4.658254 0.000000 0.000000 -0.000000 0.000000
....
2、下面介绍如何读取并保存运动数据:
上面说过BVH包括两部分:骨架层次信息和每帧运动数据。层次信息保存了每个节点相对其父节点的位置信息,通过这些数据可以构造出骨架的初始姿态。如下图所示:
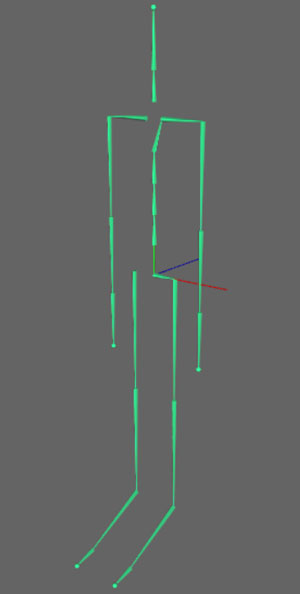
我是使用DirectX来绘制图形的,DX使用的左手坐标系,而BVH文件中使用的是右手坐标系,所以在绘制图形的时候,需要将得到的数据坐标系转换成左手坐标系。这里需要将层次信息中的z轴数据取反赋给DX中的z即可,x、y不变。
骨架中的各个关节节点相对父节点的位置读取并保存好之后,在渲染的时候,从根节点开始,依次求出每个关节在世界坐标中的位置,即可绘制出正确的骨架结构。
接下来就要读取运动数据了,首先可以从文件中读取出运动的总帧数,然后建立动态数组保存运动数据。运动数据的每帧保存的信息是这个样子的:
根节点的平移量(X、Y、Z)+除了site外所有节点的旋转信息(注意:旋转分量的次序是根据CHANNELS而定,旋转信息使用的是角度值表示的!)
每帧的旋转角度值,是相对于骨架的初始姿态的。知道这些后,接下来就是每行的读取帧数据了。代码如下:
- vec.y = atof(words.at(j+6).c_str());
- vec.x = atof(words.at(j+7).c_str());
- vec.z = atof(words.at(j+8).c_str());
- D3DXMATRIX matRotate;
- D3DXMatrixIdentity(&matRotate);
- D3DXMATRIX matY;
- D3DXMatrixIdentity(&matY);
- D3DXMatrixRotationY(&matY, -vec.y*3.14f/180.0f);
- D3DXMATRIX matX;
- D3DXMatrixIdentity(&matX);
- D3DXMatrixRotationX(&matX, -vec.x*3.14f/180.0f);
- D3DXMATRIX matZ;
- D3DXMatrixIdentity(&matZ);
- D3DXMatrixRotationZ(&matZ, vec.z*3.14f/180.0f);
- D3DXMatrixMultiply(&matRotate, &matZ, &matX);
- D3DXMatrixMultiply(&matRotate, &matRotate, &matY);
每帧相对初始姿态的数据保存好之后,在渲染时,将每一帧的旋转矩阵取出,乘以初始姿态在世界坐标系的变换矩阵,即可产生动画了
- BVH文件解析
- BVH文件解析
- BVH文件 Java解析器
- 关于java解析bvh动作文件
- BVH 文件
- BVH文件格式解析
- BVH文件格式解析
- [转]BVH文件介绍
- 表示三维运动的BVH文件格式解析
- 骨骼动画入门----BVH文件的载入和播放
- BVH File
- Biovision BVH
- openGL读取bvh
- 关于BVH 动作捕捉数据文件
- Uniform Grid , KD-Tree , BVH 性能比较
- 使用bvh数据实现OGRE骨骼动画
- Uniform Grid , KD-Tree , BVH 性能比较
- 基于BVH驱动的OGRE骨骼动画
- recv函数返回值说明
- mysql修改表名,列名,列类型,添加表列,删除表列
- ExtJs使用Array向后台发送大量数据
- 堆和栈
- linux中grep的用法以及regular expression的用法
- BVH文件解析
- Delphi RegisterHotKey 设置系统热键
- 黑马程序员--ADO.NET数据导入导出
- 字符串编码(charset, encoding/decoding)问题原理
- javax.servlet.http.HttpServletRequest对对地址栏地址信息的解析
- 生成mpx文件下载,解析mpp文件上传
- 八皇后问题
- struts2自定义分页标签
- JavaScript字符串函数大全


