PVCBOT【11号】机械猩猩--翻筋斗机器人
来源:互联网 发布:云杉网络 b 轮 编辑:程序博客网 时间:2024/04/29 06:30
在控制系统基本维持不变的情况下,计划接下来的几个项目都还是在机械结构上下功夫,而且更侧重于模仿生物界中动物的行为模式,即“仿生机器人”。虽然我们入门阶段的机器人都以BEAM也就是简单的仿生机器人为主,但是比起前面介绍的各项目机器人,接下来的仿生运动机器人在运动方式上更是与动物相似和接近。
这里首先介绍的是一个翻筋斗机器人,由于无论从外形上(上肢长下肢短),还是从翻筋斗的行为来看,都很像一只大猩猩,所以定名为“机械猩猩”。
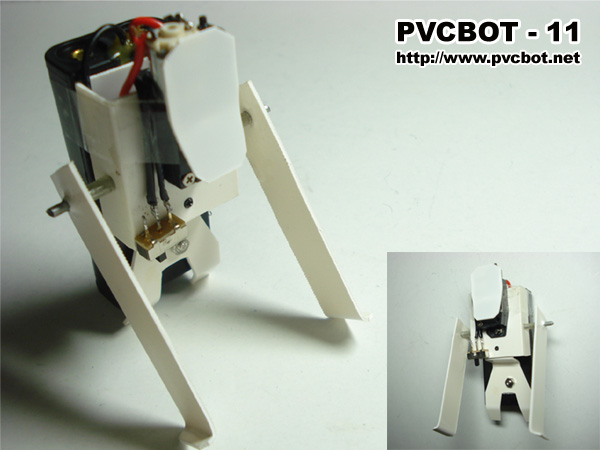
本项目的机械猩猩的控制电路相对比较简单,主要还是在机械结构和传动机构上有着特别的设计。
器材准备:

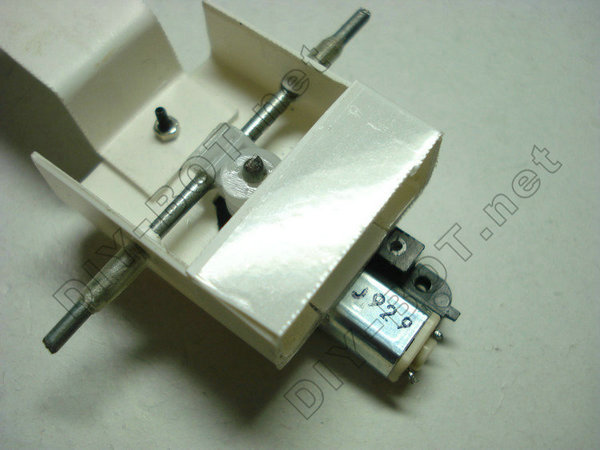
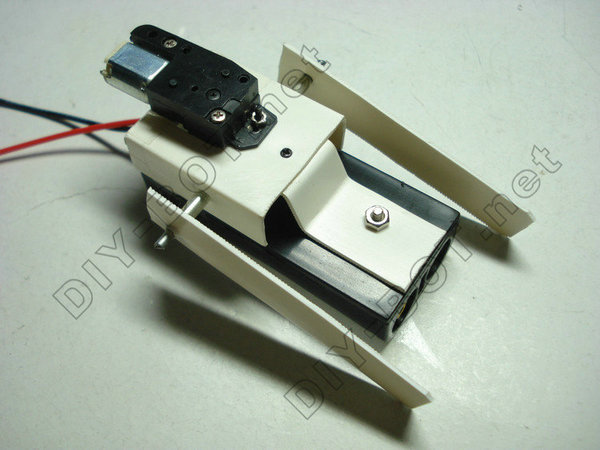
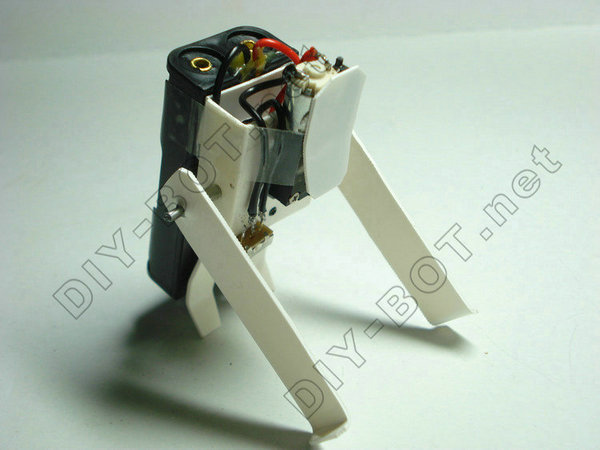
简要制作过程:


以下为视频:http://player.youku.com/player.php/sid/XMjY0OTE4NjA0/v.swf
详细教程http://www.diy-bot.net/pvcbot?id=11
这里首先介绍的是一个翻筋斗机器人,由于无论从外形上(上肢长下肢短),还是从翻筋斗的行为来看,都很像一只大猩猩,所以定名为“机械猩猩”。
本项目的机械猩猩的控制电路相对比较简单,主要还是在机械结构和传动机构上有着特别的设计。
器材准备:
简要制作过程:
以下为视频:http://player.youku.com/player.php/sid/XMjY0OTE4NjA0/v.swf
详细教程http://www.diy-bot.net/pvcbot?id=11
- PVCBOT【11号】机械猩猩--翻筋斗机器人
- PVCBOT【20号】机械螃蟹--横向爬行机器人
- PVCBOT【26号】机械蝎子--单通道线控机器人
- PVCBOT【27号】机械避役--线控变色龙机器人
- PVCBOT【14号A版】机械狗--四足爬行机器人
- PVCBOT【15号A版】机械昆虫--六足爬行机器人
- PVCBOT【16号】忙碌者--机械蜜蜂
- PVCBOT【24号】漫步者--步履机械马
- PVCBOT【22号】信步者--多足步履机械兽
- PVCBOT【1号】疯狂的小强--避障机器人
- PVCBOT【2号】晒太阳的蚊子--太阳能动力机器人
- PVCBOT【3号】光能小车--太阳能滑行机器人
- PVCBOT【4号】光能风车--太阳能转动机器人
- PVCBOT【5号B版】光能陀螺--太阳能卫星机器人
- PVCBOT【6号】光能比目鱼--太阳能翻跟斗机器人
- PVCBOT【19号】漫舞者--折叠滑步机器人
- 猩猩
- PVCBOT【12号A版】索道游者--吊绳攀爬机器人
- 在wxwidgets 界面编程使用 png 图片
- OCM备考 三. Managing Database Availability 之recovery catalog
- OCM备考 三. Managing Database Availability 之RMAN日常操作
- OCM备考 三. Managing Database Availability 之RMAN高级操作
- OCM备考 三. Managing Database Availability 之flashback
- PVCBOT【11号】机械猩猩--翻筋斗机器人
- PVCBOT【12号A版】索道游者--吊绳攀爬机器人
- 列出NSIndexSet的值
- oracle 10g 下载地址
- symbian os:读取文本中汉字的实例
- PVCBOT【13号A版】探路者--双足行走机器人
- What is “:-!!” in C code?
- PVCBOT【14号A版】机械狗--四足爬行机器人
- 筹建一个Flv视频播放服务器


