【Android笔记 七】Android Sensor感应器介绍(三)获取用户移动方向,指南针原理
来源:互联网 发布:客所思kx2a mac 编辑:程序博客网 时间:2024/05/16 11:13
转自http://blog.csdn.net/octobershiner/article/details/6641942
晚上好~今天继续给大家分享一下第二个重要的感应器,其实获取方向本应该很简单的事情,在文章一中看到 有个TYPE_ORIENTATION 关键字,说明可以直接获取设备的移动方向,但是最新版的SDK加上了这么一句话“TYPE_ORIENTATION This constant is deprecated. use SensorManager.getOrientation() instead. ”也就是说,这种方式已经被取消,要开发者使用 SensorManager.getOrientation()来获取原来的数据。
实际上,android获取方向是通过磁场感应器和加速度感应器共同获得的,至于具体的算法SDK已经封装好了。也就是说现在获取用户方向有两种方式,一是官方推荐的,通过SensorManager.getOrientation()来获取,这个方法表面看似容易(那是因为你还没看到他的参数。。一会再说),但实际上需要用到两个感应器共同完成工作,特点是更加的准确。第二种方法非常简单,就像前一篇文章获取加速度一样,直接得到三个轴上的数据。
额,从难一些的介绍吧,因为毕竟第一种方法会是android未来的一个选择,第二种不知道什么时候就要成为历史了。
android给我们提供的方向数据是一个float型的数组,包含三个方向的值 如图
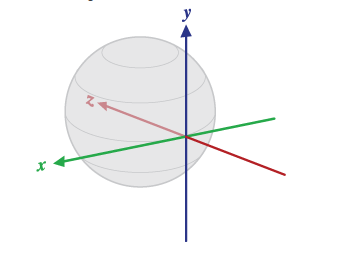
当你的手机水平放置时,被默认为静置状态,即XY角度均为0
values[0] 表示Z轴的角度:方向角,我们平时判断的东西南北就是看这个数据的,经过我的实验,发现了一个有意思的事情,也就是说使用第一种方式获得方向(磁场+加速度)得到的数据范围是(-180~180),也就是说,0表示正北,90表示正东,180/-180表示正南,-90表示正西。而第二种方式(直接通过方向感应器)数据范围是(0~360)360/0表示正北,90表示正东,180表示正南,270表示正西。
values[1] 表示X轴的角度:俯仰角 即由静止状态开始,前后翻转
values[2] 表示Y轴的角度:翻转角 即由静止状态开始,左右翻转
可见统一获取方向的方法是必须的,因为处理这些数据的算法可能针对第一种获取方式,那么当用在第二种方式时,移植性就不好了。
看下面的方法
--------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------
public static float[] getOrientation(float[] R, float[] values)
Computes the device's orientation based on the rotation matrix.
When it returns, the array values is filled with the result:
- values[0]: azimuth, rotation around the Z axis.
- values[1]: pitch, rotation around the X axis.
- values[2]: roll, rotation around the Y axis.
The reference coordinate-system used is different from the world coordinate-system defined for the rotation matrix:
- X is defined as the vector product Y.Z (It is tangential to the ground at the device's current location and roughly points West).
- Y is tangential to the ground at the device's current location and points towards the magnetic North Pole.
- Z points towards the center of the Earth and is perpendicular to the ground.
All three angles above are in radians andpositive in the counter-clockwise direction.
通常我们并不需要获取这个函数的返回值,这个方法会根据参数R[]的数据填充values[]而后者就是我们想要的。
那么R表示什么呢?又将怎么获取呢?
R[] 是一个旋转矩阵,用来保存磁场和加速度的数据,大家可以理解未加工的方向数据吧
R通过下面的静态方法获取,这个方法也是用来填充R[]
public static boolean getRotationMatrix(float[] R, float[] I, float[] gravity, float[] geomagnetic)
解释以下参数,第一个就是我们需要填充的R数组,大小是9
第二个是是一个转换矩阵,将磁场数据转换进实际的重力坐标中 一般默认情况下可以设置为null
第三个是一个大小为3的数组,表示从加速度感应器获取来的数据 在onSensorChanged中
第四个是一个大小为3的数组,表示从磁场感应器获取来的数据 在onSensorChanged中
好了基本逻辑就是这样的,下面给大家演示一个简单的测试方向的例子,可以时刻监听用户的方向
- /*
- * @author octobershiner
- * 2011 07 28
- * SE.HIT
- * 一个演示通过磁场和加速度两个感应器获取方向数据的例子
- * */
- package uni.sensor;
- import android.app.Activity;
- import android.content.Context;
- import android.hardware.Sensor;
- import android.hardware.SensorEvent;
- import android.hardware.SensorEventListener;
- import android.hardware.SensorManager;
- import android.os.Bundle;
- import android.util.Log;
- public class OrientationActivityextends Activity{
- private SensorManager sm;
- //需要两个Sensor
- private Sensor aSensor;
- private Sensor mSensor;
- float[] accelerometerValues =new float[3];
- float[] magneticFieldValues = new float[3];
- private staticfinal String TAG = "sensor";
- @Override
- public void onCreate(Bundle savedInstanceState) {
- // TODO Auto-generated method stub
- super.onCreate(savedInstanceState);
- setContentView(R.layout.main);
- sm = (SensorManager)getSystemService(Context.SENSOR_SERVICE);
- aSensor = sm.getDefaultSensor(Sensor.TYPE_ACCELEROMETER);
- mSensor = sm.getDefaultSensor(Sensor.TYPE_MAGNETIC_FIELD);
- sm.registerListener(myListener, aSensor, SensorManager.SENSOR_DELAY_NORMAL);
- sm.registerListener(myListener, mSensor,SensorManager.SENSOR_DELAY_NORMAL);
- //更新显示数据的方法
- calculateOrientation();
- }
- //再次强调:注意activity暂停的时候释放
- public void onPause(){
- sm.unregisterListener(myListener);
- super.onPause();
- }
- final SensorEventListener myListener =new SensorEventListener() {
- public void onSensorChanged(SensorEvent sensorEvent) {
- if (sensorEvent.sensor.getType() == Sensor.TYPE_MAGNETIC_FIELD)
- magneticFieldValues = sensorEvent.values;
- if (sensorEvent.sensor.getType() == Sensor.TYPE_ACCELEROMETER)
- accelerometerValues = sensorEvent.values;
- calculateOrientation();
- }
- public void onAccuracyChanged(Sensor sensor,int accuracy) {}
- };
- private void calculateOrientation() {
- float[] values =new float[3];
- float[] R = newfloat[9];
- SensorManager.getRotationMatrix(R, null, accelerometerValues, magneticFieldValues);
- SensorManager.getOrientation(R, values);
- // 要经过一次数据格式的转换,转换为度
- values[0] = (float) Math.toDegrees(values[0]);
- Log.i(TAG, values[0]+"");
- //values[1] = (float) Math.toDegrees(values[1]);
- //values[2] = (float) Math.toDegrees(values[2]);
- if(values[0] >= -5 && values[0] <5){
- Log.i(TAG, "正北");
- }
- else if(values[0] >=5 && values[0] <85){
- Log.i(TAG, "东北");
- }
- else if(values[0] >=85 && values[0] <=95){
- Log.i(TAG, "正东");
- }
- else if(values[0] >=95 && values[0] <175){
- Log.i(TAG, "东南");
- }
- else if((values[0] >=175 && values[0] <=180) || (values[0]) >= -180 && values[0] < -175){
- Log.i(TAG, "正南");
- }
- else if(values[0] >= -175 && values[0] <-95){
- Log.i(TAG, "西南");
- }
- else if(values[0] >= -95 && values[0] < -85){
- Log.i(TAG, "正西");
- }
- else if(values[0] >= -85 && values[0] <-5){
- Log.i(TAG, "西北");
- }
- }
- }
实训的时间非常紧张,抽时间写总结感觉很累,但是感觉收获很多,如果有时间的话,也想给大家分享第二种方法,和这种比起来简单很多,其实大家可以完全参考上篇文章中的代码http://blog.csdn.net/octobershiner/article/details/6639040
只要把其中的两个Sensor。TYPE_ACCELEROMETER改成 Sensor.TYPE_ORIENTATIO就好了,但是今天分享的方法大家最好掌握,这应该是未来android的标准。
Sensor感应器应该就先暂时介绍到这里吧,该看一下进程线程的东西了,其实hardware包中还有个非常重要的类,Camera摄像头,相信大家也听过android扫描器,很强大。以后有时间和大家分享吧。
接下来的安排 应该是 线程 activity然后是geocode
话说我也没有个指导老师,一个人对着SDK研究这些,有些累阿~求高人指点。
- 【Android笔记 七】Android Sensor感应器介绍(三)获取用户移动方向,指南针原理
- 【Android笔记 七】Android Sensor感应器介绍(三)获取用户移动方向,指南针原理
- Android Sensor感应器介绍:获取用户移动方向,指南针原理
- Android Sensor感应器介绍,获取用户移动方向,指南针原理
- Android Sensor感应器介绍(三)获取用户移动方向,指南针原理
- Android Sensor感应器介绍(三)获取用户移动方向,指南针原理
- Android Sensor感应器介绍(三)获取用户移动方向,指南针原理
- Android Sensor感应器:获取用户移动方向,指南针原理
- Android Sensor感应器介绍(三)Sensor类介绍
- Android 方向感应器实现指南针
- 【Android 笔记 五】 Android Sensor感应器介绍(一)重力感应加速度获取
- Android Sensor感应器介绍(一)重力感应加速度获取
- Android Sensor感应器介绍(一)
- 【Based Android】Android Sensor感应器介绍(一)重力感应加速度获取
- 如何强制禁用Android的Sensor方向感应器
- 【Android笔记 六】Android Sensor感应器介绍(二)线程中刷新UI 一个创建android测力计的例子
- android 方向传感器Sensor或指南针罗盘研究
- Android感应器Sensor的使用
- Android架构_xgqsa-ChinaUnix博客
- Android中G-Sensor相关流程
- 子夜悟道随笔
- android中Sensor 工作流程
- Android Sensor 入门
- 【Android笔记 七】Android Sensor感应器介绍(三)获取用户移动方向,指南针原理
- Android Sensor工作流程(一)
- Android学习之Sensor
- keytool 错误: java.io.FileNotFoundException: MyAndroidKey.keystore (拒绝访问).
- 创业公司的市场如何做?
- Link Stack
- LED驱动程序例子
- Vert.x的未来将何去何从?
- Java的文件输入输出


