雅可比矩阵
来源:互联网 发布:centos7 安装网络配置 编辑:程序博客网 时间:2024/04/29 00:28
雅可比矩阵[编辑]
在向量分析中,雅可比矩阵是一阶偏导数以一定方式排列成的矩阵,其行列式称为雅可比行列式。
还有,在代数几何中,代数曲线的雅可比量表示雅可比簇:伴随该曲线的一个代数群,曲线可以嵌入其中。
它们全部都以数学家卡尔·雅可比命名;英文雅可比量"Jacobian"可以发音为[ja ˈko bi ən]或者[ʤə ˈko bi ən]。
目录
[隐藏]- 1 雅可比矩阵
- 1.1 例子
- 1.2 在动力系统中
- 2 雅可比行列式
- 2.1 例子
- 3 参看
- 4 外部连接
雅可比矩阵[编辑]
雅可比矩阵的重要性在于它体现了一个可微方程与给出点的最优线性逼近。因此,雅可比矩阵类似于多元函数的导数。 假设F:Rn→Rm 是一个从n维欧氏空间转换到m维欧氏空间的函数。这个函数由m个实函数组成: y1(x1, ..., xn), ..., ym(x1, ...,xn)。这些函数的偏导数(如果存在)可以组成一个m行n列的矩阵(m by n),这就是所谓的雅可比矩阵:
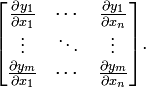
此矩阵表示为:
 ,或者
,或者 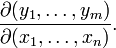
这个矩阵的第i行是由梯度函数的转置yi(i=1,...,m)表示的
如果p是Rn中的一点,F在p点可微分,那么在这一点的导数由JF(p)给出(这是求该点导数最简便的方法)。在此情况下,由JF(p)描述的线性算子即接近点p的F的最优线性逼近,x逼近于p

例子[编辑]
由球坐标系到直角坐标系的转化由F函数给出:R × [0,π] × [0,2π] → R3



此坐标变换的雅可比矩阵是
![J_F(r,\theta,\phi) =\begin{bmatrix}\frac{\partial x_1}{\partial r} & \frac{\partial x_1}{\partial \theta} & \frac{\partial x_1}{\partial \phi} \\[3pt]\frac{\partial x_2}{\partial r} & \frac{\partial x_2}{\partial \theta} & \frac{\partial x_2}{\partial \phi} \\[3pt]\frac{\partial x_3}{\partial r} & \frac{\partial x_3}{\partial \theta} & \frac{\partial x_3}{\partial \phi} \\\end{bmatrix}=\begin{bmatrix} \sin\theta \cos\phi & r \cos\theta \cos\phi & -r \sin\theta \sin\phi \\\sin\theta \sin\phi & r \cos\theta \sin\phi & r \sin\theta \cos\phi \\ \cos\theta & -r \sin\theta & 0 \end{bmatrix}.](http://upload.wikimedia.org/math/3/8/6/386498ee13deadc4d2f636f2e32b77de.png)
R4的f函数:




其雅可比矩阵为:
![J_F(x_1,x_2,x_3) =\begin{bmatrix}\frac{\partial y_1}{\partial x_1} & \frac{\partial y_1}{\partial x_2} & \frac{\partial y_1}{\partial x_3} \\[3pt]\frac{\partial y_2}{\partial x_1} & \frac{\partial y_2}{\partial x_2} & \frac{\partial y_2}{\partial x_3} \\[3pt]\frac{\partial y_3}{\partial x_1} & \frac{\partial y_3}{\partial x_2} & \frac{\partial y_3}{\partial x_3} \\[3pt]\frac{\partial y_4}{\partial x_1} & \frac{\partial y_4}{\partial x_2} & \frac{\partial y_4}{\partial x_3} \\\end{bmatrix}=\begin{bmatrix} 1 & 0 & 0 \\ 0 & 0 & 5 \\ 0 & 8x_2 & -2 \\ x_3\cos(x_1) & 0 & \sin(x_1) \end{bmatrix}.](http://upload.wikimedia.org/math/4/f/6/4f617beeec6717270d5be64e9d7ed812.png)
此例子说明雅可比矩阵不一定为方矩阵。
在动力系统中[编辑]
考虑形为x' = F(x)的动力系统,F : Rn → Rn。如果F(x0) = 0,那么x0是一个驻点。系统接近驻点时的表现通常可以从JF(x0)的特征值来决定。
雅可比行列式[编辑]
如果m = n,那么F是从n维空间到n维空间的函数,且它的雅可比矩阵是一个方块矩阵。于是我们可以取它的行列式,称为雅可比行列式。
在某个给定点的雅可比行列式提供了F在接近该点时的表现的重要信息。例如,如果连续可微函数F在p点的雅可比行列式不是零,那么它在该点附近具有反函数。这称为反函数定理。更进一步,如果p点的雅可比行列式是正数,则F在p点的取向不变;如果是负数,则F的取向相反。而从雅可比行列式的绝对值,就可以知道函数F在p点的缩放因子;这就是为什么它出现在换元积分法中。
例子[编辑]
设有函数F : R3 → R3,其分量为:



则它的雅可比行列式为:

从中我们可以看到,当x1和x2同号时,F的取向相反;该函数处处具有反函数,除了在x1 = 0和x2 = 0时以外。
- 雅可比矩阵
- 雅可比矩阵
- 雅可比矩阵
- matlab 雅可比矩阵求取
- 雅可比矩阵matlab实现
- 雅可比(Jacobian)矩阵
- 雅可比矩阵 和 海森矩阵
- 雅可比矩阵 和 海森矩阵
- 雅可比矩阵和海森矩阵
- 雅可比矩阵 和 海森矩阵
- 雅可比矩阵和Hessian矩阵
- 雅可比(Jacobi)矩阵与行列式
- 运动学与雅可比矩阵举例
- 机器人雅可比矩阵的求法_构造法
- 转载大神的对雅可比矩阵和海森矩阵的讲解
- 雅可比迭代
- 雅可比迭代
- 雅可比迭代法
- vim 配置及用法
- Mysql使用Federate引擎实现操作本地表映射远程操作表
- jetty
- 编译通过不能执行
- jQuery之下拉框左右选择
- 雅可比矩阵
- 经典线程同步 关键段CS
- 获取adriod 虚拟机的ip
- 计算机视觉相对容易的期刊
- MFC框架分析
- 大数运算(超长整数运算)算法的简单分析
- 输出n的因子
- IOS面试题
- android如何改变系统默认横竖屏方向


