opencv filter2D
来源:互联网 发布:安知玉如意江云儿 编辑:程序博客网 时间:2024/06/04 23:52
实现自己的线性滤波器¶
目的¶
本篇教程中,我们将学到:
- 用OpenCV函数 filter2D 创建自己的线性滤波器。
原理¶
Note
以下解释节选自Bradski and Kaehler所著 Learning OpenCV 。
卷积¶
高度概括地说,卷积是在每一个图像块与某个算子(核)之间进行的运算。
核是什么?¶
核说白了就是一个固定大小的数值数组。该数组带有一个 锚点 ,一般位于数组中央。
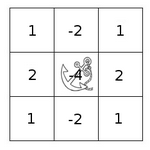
如何用核实现卷积?¶
假如你想得到图像的某个特定位置的卷积值,可用下列方法计算:
- 将核的锚点放在该特定位置的像素上,同时,核内的其他值与该像素邻域的各像素重合;
- 将核内各值与相应像素值相乘,并将乘积相加;
- 将所得结果放到与锚点对应的像素上;
- 对图像所有像素重复上述过程。
用公式表示上述过程如下:

幸运的是,我们不必自己去实现这些运算,OpenCV为我们提供了函数 filter2D 。
代码¶
下面这段程序做了些什么?
载入一幅图像
对图像执行 归一化块滤波器 。举例来说,如果该滤波器核的大小为
 ,则它会像下面这样:
,则它会像下面这样: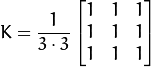
程序将执行核的大小分别为3、5、7、9、11的滤波器运算。
该滤波器每一种核的输出将在屏幕上显示500毫秒
本教程代码所示如下。你也可以从 这里 下载。
#include "opencv2/imgproc/imgproc.hpp"#include "opencv2/highgui/highgui.hpp"#include <stdlib.h>#include <stdio.h>using namespace cv;/** @函数main */int main ( int argc, char** argv ){ /// 声明变量 Mat src, dst; Mat kernel; Point anchor; double delta; int ddepth; int kernel_size; char* window_name = "filter2D Demo"; int c; /// 载入图像 src = imread( argv[1] ); if( !src.data ) { return -1; } /// 创建窗口 namedWindow( window_name, CV_WINDOW_AUTOSIZE ); /// 初始化滤波器参数 anchor = Point( -1, -1 ); delta = 0; ddepth = -1; /// 循环 - 每隔0.5秒,用一个不同的核来对图像进行滤波 int ind = 0; while( true ) { c = waitKey(500); /// 按'ESC'可退出程序 if( (char)c == 27 ) { break; } /// 更新归一化块滤波器的核大小 kernel_size = 3 + 2*( ind%5 ); kernel = Mat::ones( kernel_size, kernel_size, CV_32F )/ (float)(kernel_size*kernel_size); /// 使用滤波器 filter2D(src, dst, ddepth , kernel, anchor, delta, BORDER_DEFAULT ); imshow( window_name, dst ); ind++; } return 0;}说明¶
载入一幅图像
src = imread( argv[1] );if( !src.data ) { return -1; }
创建窗口以显示结果
namedWindow( window_name, CV_WINDOW_AUTOSIZE );
初始化线性滤波器的参数
anchor = Point( -1, -1 );delta = 0;ddepth = -1;
执行无限循环。在循环中,我们更新了核的大小,并将线性滤波器用在输入图像上。下面,我们详细分析一下该循环:
首先,我们定义滤波器要用到的核。像下面这样:
kernel_size = 3 + 2*( ind%5 );kernel = Mat::ones( kernel_size, kernel_size, CV_32F )/ (float)(kernel_size*kernel_size);
第一行代码将 核的大小 设置为
![[3,11]](http://www.opencv.org.cn/opencvdoc/2.3.2/html/_images/math/d06ded5510df3d9bb3bb09a89c0ce9b717998628.png) 范围内的奇数。第二行代码把1填充进矩阵,并执行归一化——除以矩阵元素数——以构造出所用的核。
范围内的奇数。第二行代码把1填充进矩阵,并执行归一化——除以矩阵元素数——以构造出所用的核。将核设置好之后,使用函数 filter2D 就可以生成滤波器:
filter2D(src, dst, ddepth , kernel, anchor, delta, BORDER_DEFAULT );
其中各参数含义如下:
- src: 源图像
- dst: 目标图像
- ddepth: dst 的深度。若为负值(如
 ),则表示其深度与源图像相等。
),则表示其深度与源图像相等。 - kernel: 用来遍历图像的核
- anchor: 核的锚点的相对位置,其中心点默认为 (-1, -1) 。
- delta: 在卷积过程中,该值会加到每个像素上。默认情况下,这个值为
 。
。 - BORDER_DEFAULT: 这里我们保持其默认值,更多细节将在其他教程中详解
#. 我们在程序里写了个 while 循环。每隔500毫秒,滤波器的核将在我们所指定的范围内更新。结果 ========
编译好上述代码之后,输入图像路径的参数,我们就可以执行这个程序。其输出结果是一个窗口,其中显示了由归一化滤波器模糊之后的图像。每过0.5秒,滤波器核的大小会有所变化,如你在下面几张图像中所见:

翻译者¶
loveisp@ OpenCV中文网站 <loveispdvd@gmail.com>
- opencv filter2D
- OpenCV的Filter2D代码解析
- OpenCV中的模板匹配/Filter2d
- filter2D
- OpenCV学习笔记(6):滤波filter2D()
- matlab imfilter 对于 opencv filter2D 参数
- opencv filter2D函数实现图像卷积
- 学习OpenCV(三)用filter2D实现矩阵掩码操作
- Opencv学习笔记(六):Mask Operation filter2D函数
- 学习OpenCV(三)用filter2D实现矩阵掩码操作
- opencv学习(七)之图像卷积运算函数filter2D()
- opencv学习(三十)之设计线性滤波器filter2D
- filter2D函数
- filter2D function
- opencv中cvFilter2D( ) 函数filter2D()函数与MATLAB中imfilter()函数的差异
- 利用OpenCV的filter2D函数作图像的卷积操作和协相关操作
- filter2D 图像滤波
- filter2D图像卷积
- java 正则扫描EL 表达式
- 算法杂货铺——k均值聚类(K-means)
- maven3简单配置和使用
- 【Internet】android.os.NetworkOnMainThreadException问题
- Finding and Installing a NuGet Package Using the Package Manager Console
- opencv filter2D
- Linux Redhat 6.4 Redis 2.6.14 缓存服务 完全安装手册
- OpenGL(3)GLUT库回调函数API
- SSL证书与Https应用部署小结
- wince下添加和删除驱动出现错误
- Python中asarray用法
- Struct和Class的区别
- 抽象工厂模式
- K-Means算法


