风扇控制系统--初版
来源:互联网 发布:刺客信条起源n卡优化 编辑:程序博客网 时间:2024/04/29 15:40
风扇控制系统--初版
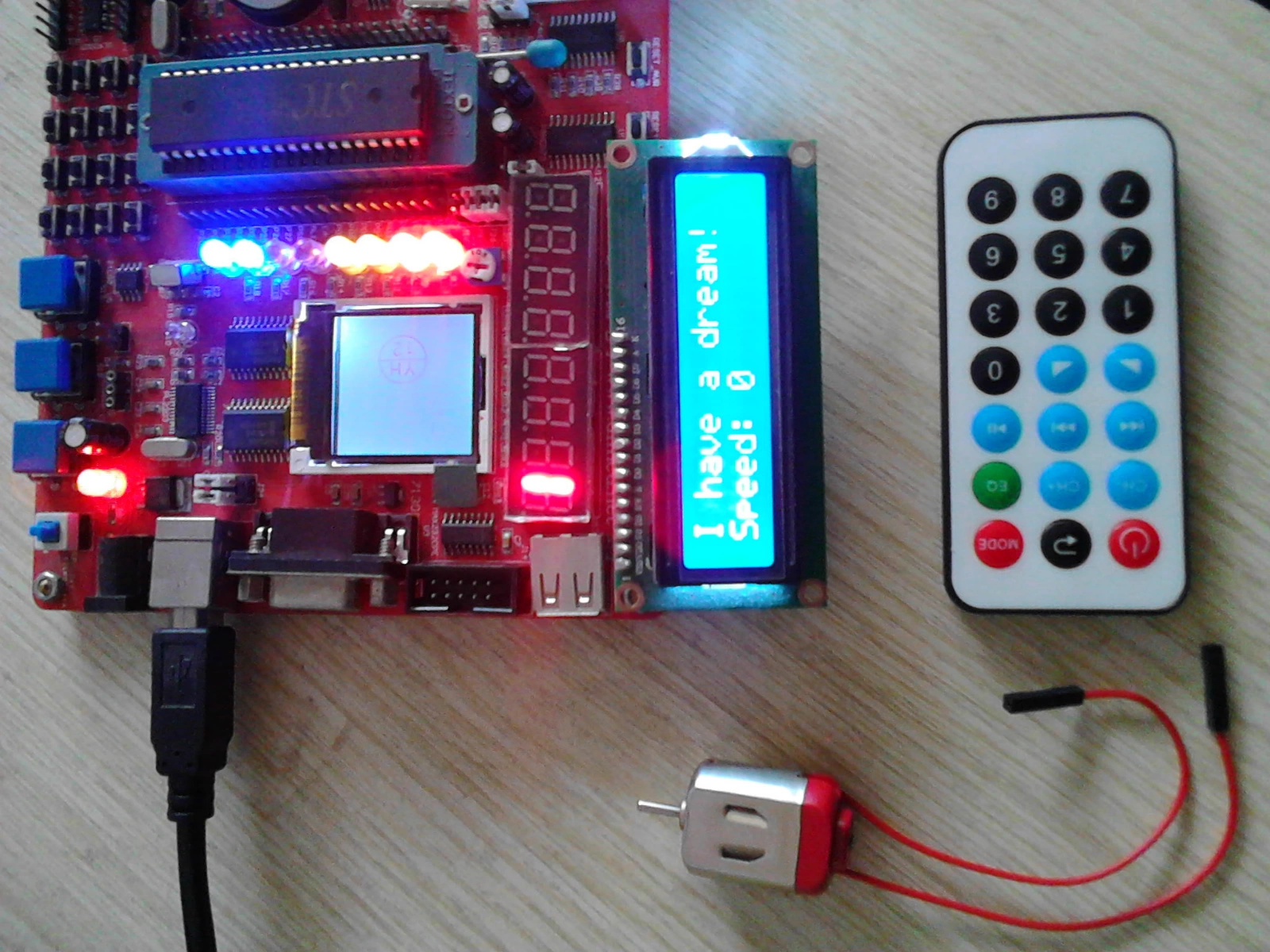
利用51单片机实现的风扇控制系统,包括硬件到软件的实现。(功能未完,待完善)
硬件的代码如下:
/********************************************************************
硬件的代码如下:
/********************************************************************
* 文件名 : 风扇控制智能系统
* 描述 :
1、红外线遥控板 控制风扇开关 挡速
2、液晶显示器 显示风扇的工作情况
3、客户端显示风扇工作情况
4、客户端控制风扇工作
5、定时开关风扇 LED倒数
6、开启风扇时 记录上次的挡速
* 创建人 : wu_zhuojun,2014年2月16日 北京
* 版本号 : 2.0
***********************************************************************/
#include <reg51.h>
#include <intrins.h>
#define uchar unsigned char
#define uint unsigned int
uchar LCD_ID_1[16] = {"I have a dream!"};
uchar LCD_ID_2[16] = {"Speed: 0"};
void delay(uchar x); //x*0.14MS
void delay1(int ms);
void beep();
sbit IRIN = P3^3; //红外接收器数据线
sbit BEEP = P1^5; //蜂鸣器驱动线
sbit RELAY= P1^4; //继电器驱动线
uchar IRCOM[7];
sbit E=P2^7;//1602使能引脚
sbit RW=P2^6;//1602读写引脚
sbit RS=P2^5;//1602数据/命令选择引脚
/********************************************************************
* 名称 : delay()
* 功能 : 延时,延时时间大概为140US。
* 输入 : 无
* 输出 : 无
***********************************************************************/
void Delay2()
{
int i,j;
for(i=0; i<=10; i++)
for(j=0; j<=2; j++)
;
}
/********************************************************************
* 名称 : enable(uchar del)
* 功能 : 1602命令函数
* 输入 : 输入的命令值
* 输出 : 无
***********************************************************************/
void enable(uchar del)
{
P0 = del;
RS = 0;
RW = 0;
E = 0;
Delay2();
E = 1;
Delay2();
}
/********************************************************************
* 名称 : write(uchar del)
* 功能 : 1602写数据函数
* 输入 : 需要写入1602的数据
* 输出 : 无
***********************************************************************/
void write(uchar del)
{
P0 = del;
RS = 1;
RW = 0;
E = 0;
Delay2();
E = 1;
Delay2();
}
/********************************************************************
* 名称 : L1602_init()
* 功能 : 1602初始化,请参考1602的资料
* 输入 : 无
* 输出 : 无
***********************************************************************/
void L1602_init(void)
{
enable(0x01);
enable(0x38);
enable(0x0c);
enable(0x06);
enable(0xd0);
}
/********************************************************************
* 名称 : L1602_char(uchar hang,uchar lie,char sign)
* 功能 : 改变液晶中某位的值,如果要让第一行,第五个字符显示"b" ,调用该函数如下
L1602_char(1,5,'b')
* 输入 : 行,列,需要输入1602的数据
* 输出 : 无
***********************************************************************/
void L1602_char(uchar hang,uchar lie,char sign)
{
uchar a;
if(hang == 1) a = 0x80;
if(hang == 2) a = 0xc0;
a = a + lie - 1;
enable(a);
write(sign);
}
/********************************************************************
* 名称 : L1602_string(uchar hang,uchar lie,uchar *p)
* 功能 : 改变液晶中某位的值,如果要让第一行,第五个字符开始显示"ab cd ef" ,调用该函数如下
L1602_string(1,5,"ab cd ef;")
* 输入 : 行,列,需要输入1602的数据
* 输出 : 无
***********************************************************************/
void L1602_string(uchar hang,uchar lie,uchar *p)
{
uchar a;
if(hang == 1) a = 0x80;
if(hang == 2) a = 0xc0;
a = a + lie - 1;
enable(a);
while(1)
{
if(*p == '\0') break;
write(*p);
p++;
}
}
/********************************************************************
* 名称 : Com_Init()
* 功能 : 初始化串口程序,晶振11.0592, 波特率9600
* 输入 : 无
* 输出 : 无
***********************************************************************/
void Com_Init(void)
{
TMOD = 0x20;
PCON = 0x00;
SCON = 0x50;
TH1 = 0xFd;
TL1 = 0xFd;
TR1 = 1;
}
/********************************************************************
* 名称 : main()
* 功能 :
* 输入 : 无
* 输出 : 无
***********************************************************************/
main()
{
//所要发送的数据 所用的串口是烧写程序的串口,并不是9针串口
//uchar code Buffer[] = "wo shi wuzhuojun";
//uchar *p = Buffer;
//P2 = 0x00;
//p = Buffer;
//=========初始化红外线控制 Begin=======//
IE = 0x84; //允许总中断中断,使能 INT1 外部中断
TCON = 0x10; //触发方式为脉冲负边沿触发
IRIN=1; //I/O口初始化
BEEP=1;
RELAY=1;
//=========初始化红外线控制 End=======//
delay1(10); //延时
L1602_init(); //初始化LCD
L1602_string(1, 1, LCD_ID_1); //设置 液晶显示屏 显示LCD_ID_1的内容
L1602_string(2, 1, LCD_ID_2); //设置 液晶显示屏 显示LCD_ID_2的内容
//=======初始化串口 Begin=======//
Com_Init();
#if 0
while(1)
{
SBUF = *p;
while(!TI) //如果发送完毕,硬件会置位TI
{
_nop_();
}
p++;
if(*p == '\0') break;//在每个字符串的最后,会有一个'\0'
TI = 0; //TI清零
}
#endif
//=======初始化串口 Begin=======//
while(1);
} //end main
/********************************************************************
* 名称 : IR_IN interrupt 2 using 0
* 功能 : 接收红外线数据,并中断处理液晶屏显示
* 输入 : 无
* 输出 : 无
***********************************************************************/
void IR_IN() interrupt 2 using 0
{
//======初始化串口发送数据 变量 Begin=======//
uchar code strSpeed[][4] = {"0", "1", "2", "3" };
uchar *p = strSpeed[0]; //初始化为 0 档
//======初始化串口发送数据 变量 End=======//
unsigned char j,k,N=0;
EX1 = 0;
delay(15);
if (IRIN==1)
{
EX1 =1;
return;
}
//确认IR信号出现
while (!IRIN) //等IR变为高电平,跳过9ms的前导低电平信号。
{
delay(1);
}
for (j=0;j<4;j++) //收集四组数据
{
for (k=0;k<8;k++) //每组数据有8位
{
while (IRIN) //等 IR 变为低电平,跳过4.5ms的前导高电平信号。
{
delay(1);
}
while (!IRIN) //等 IR 变为高电平
{
delay(1);
}
while (IRIN) //计算IR高电平时长
{
delay(1);
N++;
if (N>=30)
{
EX1=1;
return;
} //if (N>=30) //0.14ms计数过长自动离开。
} //while (IRIN) //高电平计数完毕
IRCOM[j]=IRCOM[j] >> 1; //数据最高位补“0”
if (N>=8)
{
IRCOM[j] = IRCOM[j] | 0x80; //数据最高位补“1”
} //if (N>=8)
N=0;
}//for (k=0;k<8;k++)
}//for (j=0;j<4;j++)
if (IRCOM[2]!=~IRCOM[3])
{
EX1=1;
return;
}
IRCOM[5]=IRCOM[2] & 0x0F; //取键码的低四位
IRCOM[6]=IRCOM[2] >> 4; //右移4次,高四位变为低四位
if(IRCOM[5]>9)
{
IRCOM[5]=IRCOM[5]+0x37;
}
else
IRCOM[5]=IRCOM[5]+0x30;
if(IRCOM[6]>9)
{
IRCOM[6]=IRCOM[6]+0x37;
}
else
IRCOM[6]=IRCOM[6]+0x30;
//=======控制 液晶显示屏显示数据 Begin=========//
//L1602_char(2,10,IRCOM[5]);
//L1602_char(2,9,IRCOM[6]);
if( ('4' == IRCOM[6]) && ('5' == IRCOM[5])) //触发开关键
{
p = strSpeed[0]; //档速
L1602_char(2,8,'0');
}
else if( ('0' == IRCOM[6]) && ('C' == IRCOM[5])) //触发1号键
{
p = strSpeed[1]; //档速
L1602_char(2,8,'1');
}
else if( ('1' == IRCOM[6]) && ('8' == IRCOM[5])) //触发2号键
{
p = strSpeed[2]; //档速
L1602_char(2,8,'2');
}
else if( ('5' == IRCOM[6]) && ('E' == IRCOM[5])) //触发3号键
{
p = strSpeed[3]; //档速
L1602_char(2,8,'3');
}
//=======控制 液晶显示屏显示数据 End=========//
//=======发送串口数据 Begin=========//
while(1)
{
SBUF = *p;
while(!TI) //如果发送完毕,硬件会置位TI
{
_nop_();
}
p++;
if(*p == '\0') break;//在每个字符串的最后,会有一个'\0'
TI = 0; //TI清零
}
//=======发送串口数据 End=========//
//beep();
EX1 = 1;
}
/**********************************************************/
void beep()
{
unsigned char i;
for (i=0;i<100;i++)
{
delay(4);
BEEP=!BEEP; //BEEP取反
}
BEEP=1; //关闭蜂鸣器
}
/**********************************************************/
void delay(unsigned char x) //x*0.14MS
{
unsigned char i;
while(x--)
{
for (i = 0; i<13; i++) {}
}
}
/**********************************************************/
void delay1(int ms)
{
unsigned char y;
while(ms--)
{
for(y = 0; y<250; y++)
{
_nop_();
_nop_();
_nop_();
_nop_();
}
}
}
串口接收到单片机是数据:
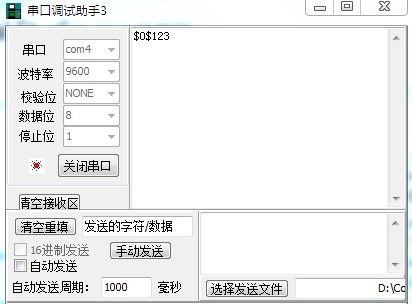
软件实现的代码如下: (待续)
0 0
- 风扇控制系统--初版
- 控制系统
- 控制系统
- 风扇调速
- 散热风扇
- 自定义下拉框初版
- 信息管理系统初版
- 澳门一日游 初版
- 颜色识别代码--初版
- jQuery2006最初版注释
- 下载进度指示器初版。。。
- 开发规范拟定--初版
- matrix(c++实现,初版)
- js--分页效果(自己初版)
- 路径规划算法总结初版
- Android计算器(最初版)
- WPF + dx9 + dx11初版完成
- (原创)斗牛游戏 初版
- NYOJ 115 城市平乱
- ReportStudio进阶教程(十) - 图表-基本图表介绍
- LINQ to SQL语句之用户定义函数(存储过程标量函数)
- 机器学习前沿热点--Deep Learning
- 跟我一起学extjs5(28--加入模块和菜单定义[1建立数据库和表])
- 风扇控制系统--初版
- 排序算法总结(三)
- FreeSWITCH - mod_fifo On-hook Agent模式配置示例
- 《摩纳哥王妃》观感 及对教育的认知
- windows下设置双击jar文件可以直接运行
- 机器学习简史 1
- Mac下将libpomelo连接到Cocos2d-x的解决方案
- 关于乱码的问题--Tomcat的编码修改
- a pair of


