基于S3C2440的嵌入式Linux驱动——SPI子系统解读(二)
来源:互联网 发布:投资 知乎 编辑:程序博客网 时间:2024/04/28 16:12
第一部分,将对SPI子系统整体进行描述,同时给出SPI的相关数据结构,最后描述SPI总线的注册。基于S3C2440的嵌入式Linux驱动——SPI子系统解读(一)
第二部分,该文将对SPI的主控制器(master)驱动进行描述。 基于S3C2440的嵌入式Linux驱动——SPI子系统解读(二)
第三部分,该文将对SPI设备驱动,也称protocol 驱动,进行讲解。基于S3C2440的嵌入式Linux驱动——SPI子系统解读(三)
第四部分,即本篇文章,通过SPI设备驱动留给用户层的API,我们将从上到下描述数据是如何通过SPI的protocol 驱动,由bitbang 中转,最后由master驱动将
数据传输出去。基于S3C2440的嵌入式Linux驱动——SPI子系统解读(四)
本文属于第二部分。
4. 主控制器驱动程序
4.1 定义 platform device
下列数据结构位于arch/arm/plat-s3c24XX/devs.c
- /* SPI (0) */
- static struct resource s3c_spi0_resource[] = {
- [0] = {
- .start = S3C24XX_PA_SPI,
- .end = S3C24XX_PA_SPI + 0x1f,
- .flags = IORESOURCE_MEM,
- },
- [1] = {
- .start = IRQ_SPI0,
- .end = IRQ_SPI0,
- .flags = IORESOURCE_IRQ,
- }
- };
- static u64 s3c_device_spi0_dmamask = 0xffffffffUL;
- struct platform_device s3c_device_spi0 = {
- .name = "s3c2410-spi",
- .id = 0,
- .num_resources = ARRAY_SIZE(s3c_spi0_resource),
- .resource = s3c_spi0_resource,
- .dev = {
- .dma_mask = &s3c_device_spi0_dmamask,
- .coherent_dma_mask = 0xffffffffUL
- }
- };
platform设备给出了spi0接口的寄存器地址资源以及IRQ资源。注意其设备名为s3c2410-spi。
下列函数位于deivers/spi/s3c24xx.c。
- MODULE_ALIAS("platform:s3c2410-spi");
- static struct platform_driver s3c24xx_spi_driver = {
- .remove = __exit_p(s3c24xx_spi_remove),
- .suspend = s3c24xx_spi_suspend,
- .resume = s3c24xx_spi_resume,
- .driver = {
- .name = "s3c2410-spi",
- .owner = THIS_MODULE,
- },
- };
- static int __init s3c24xx_spi_init(void)
- {
- return platform_driver_probe(&s3c24xx_spi_driver, s3c24xx_spi_probe);//设备不可热插拔,所以使用该函数,而不是platform_driver_register
- }
- static void __exit s3c24xx_spi_exit(void)
- {
- platform_driver_unregister(&s3c24xx_spi_driver);
- }
- module_init(s3c24xx_spi_init);
- module_exit(s3c24xx_spi_exit);
调用了platform_driver_probe注册platform驱动,注册完成以后将会调用platform的s3c24xx_spi_probe函数。
NOTE:platform驱动的name和platform device的name是相同的。
4.2.1 s3c24xx_spi_probe函数
下列函数位于deivers/spi/s3c24xx.c。
- static int __init s3c24xx_spi_probe(struct platform_device *pdev)
- {
- struct s3c2410_spi_info *pdata;
- struct s3c24xx_spi *hw;
- struct spi_master *master;
- struct resource *res;
- int err = 0;
- /*分配master结构体,其中包括s3c24xx_spi结构的内存空间,使用master.dev.driver_data指向它*/
- master = spi_alloc_master(&pdev->dev, sizeof(struct s3c24xx_spi));
- if (master == NULL) {
- dev_err(&pdev->dev, "No memory for spi_master\n");
- err = -ENOMEM;
- goto err_nomem;
- }
- /*获得s3c24xx_spi结构,并清0该结构*/
- hw = spi_master_get_devdata(master);
- memset(hw, 0, sizeof(struct s3c24xx_spi));
- hw->master = spi_master_get(master); /*保存master结构体,同时增加引用计数*/
- hw->pdata = pdata = pdev->dev.platform_data; /*获取s3c2410_spi_info结构体指针*/
- hw->dev = &pdev->dev; /*保存platform设备的dev*/
- if (pdata == NULL) {
- dev_err(&pdev->dev, "No platform data supplied\n");
- err = -ENOENT;
- goto err_no_pdata;
- }
- platform_set_drvdata(pdev, hw); /*让platform_devuce.dev.driver_data 指向 s3c24xx_spi*/
- init_completion(&hw->done); /*初始化completion*/
- /* setup the master state. */ /*填充master结构体的两个字段*/
- master->num_chipselect = hw->pdata->num_cs;
- master->bus_num = pdata->bus_num;
- /* setup the state for the bitbang driver */ /*填充bitbang字段*/
- hw->bitbang.master = hw->master;
- hw->bitbang.setup_transfer = s3c24xx_spi_setupxfer;
- hw->bitbang.chipselect = s3c24xx_spi_chipsel;
- hw->bitbang.txrx_bufs = s3c24xx_spi_txrx;
- hw->bitbang.master->setup = s3c24xx_spi_setup;
- dev_dbg(hw->dev, "bitbang at %p\n", &hw->bitbang);
- /* find and map our resources */
- res = platform_get_resource(pdev, IORESOURCE_MEM, 0); /*获取IO资源*/
- if (res == NULL) {
- dev_err(&pdev->dev, "Cannot get IORESOURCE_MEM\n");
- err = -ENOENT;
- goto err_no_iores;
- }
- hw->ioarea = request_mem_region(res->start, (res->end - res->start)+1, /*申请IO内存*/
- pdev->name);
- if (hw->ioarea == NULL) {
- dev_err(&pdev->dev, "Cannot reserve region\n");
- err = -ENXIO;
- goto err_no_iores;
- }
- hw->regs = ioremap(res->start, (res->end - res->start)+1); /*建立映射*/
- if (hw->regs == NULL) {
- dev_err(&pdev->dev, "Cannot map IO\n");
- err = -ENXIO;
- goto err_no_iomap;
- }
- hw->irq = platform_get_irq(pdev, 0); /*获取irq号*/
- if (hw->irq < 0) {
- dev_err(&pdev->dev, "No IRQ specified\n");
- err = -ENOENT;
- goto err_no_irq;
- }
- err = request_irq(hw->irq, s3c24xx_spi_irq, 0, pdev->name, hw); /*申请spi中断,ISR为 s3c24xx_spi_irq*/
- if (err) {
- dev_err(&pdev->dev, "Cannot claim IRQ\n");
- goto err_no_irq;
- }
- hw->clk = clk_get(&pdev->dev, "spi"); /*获取spi时钟*/
- if (IS_ERR(hw->clk)) {
- dev_err(&pdev->dev, "No clock for device\n");
- err = PTR_ERR(hw->clk);
- goto err_no_clk;
- }
- /* setup any gpio we can */
- if (!pdata->set_cs) { /*没有定义分配CS管脚的函数*/
- if (pdata->pin_cs < 0) { /*pin_cs为cs管脚*/
- dev_err(&pdev->dev, "No chipselect pin\n");
- goto err_register;
- }
- err = gpio_request(pdata->pin_cs, dev_name(&pdev->dev));/*申请IO地址*/
- if (err) {
- dev_err(&pdev->dev, "Failed to get gpio for cs\n");
- goto err_register;
- }
- hw->set_cs = s3c24xx_spi_gpiocs; /*给出分配cs管脚函数*/
- gpio_direction_output(pdata->pin_cs, 1); /*设置该管脚为输出,貌似多次一举,在probe已经调用过该函数*/
- } else
- hw->set_cs = pdata->set_cs;
- s3c24xx_spi_initialsetup(hw); /*spi控制器初始化*/
- /* register our spi controller */
- err = spi_bitbang_start(&hw->bitbang);
- if (err) {
- dev_err(&pdev->dev, "Failed to register SPI master\n");
- goto err_register;
- }
- return 0;
- err_register:
- if (hw->set_cs == s3c24xx_spi_gpiocs)
- gpio_free(pdata->pin_cs);
- clk_disable(hw->clk);
- clk_put(hw->clk);
- err_no_clk:
- free_irq(hw->irq, hw);
- err_no_irq:
- iounmap(hw->regs);
- err_no_iomap:
- release_resource(hw->ioarea); /*先释放资源*/
- kfree(hw->ioarea); /*再释放空间*/
- err_no_iores:
- err_no_pdata:
- spi_master_put(hw->master);; /*减少引用计数*/
- err_nomem:
- return err;
- }
- /**
- * spi_alloc_master - allocate SPI master controller
- * @dev: the controller, possibly using the platform_bus
- * @size: how much zeroed driver-private data to allocate; the pointer to this
- * memory is in the driver_data field of the returned device,
- * accessible with spi_master_get_devdata().
- * Context: can sleep
- *
- * This call is used only by SPI master controller drivers, which are the
- * only ones directly touching chip registers. It's how they allocate
- * an spi_master structure, prior to calling spi_register_master().
- *
- * This must be called from context that can sleep. It returns the SPI
- * master structure on success, else NULL.
- *
- * The caller is responsible for assigning the bus number and initializing
- * the master's methods before calling spi_register_master(); and (after errors
- * adding the device) calling spi_master_put() to prevent a memory leak.
- */
- struct spi_master *spi_alloc_master(struct device *dev, unsigned size)
- {
- struct spi_master *master;
- if (!dev)
- return NULL;
- master = kzalloc(size + sizeof *master, GFP_KERNEL);
- if (!master)
- return NULL;
- device_initialize(&master->dev);
- master->dev.class = &spi_master_class;
- master->dev.parent = get_device(dev);
- spi_master_set_devdata(master, &master[1]);
- return master;
- }
- EXPORT_SYMBOL_GPL(spi_alloc_master);
s3c24xx_spi结构如下:
- struct s3c24xx_spi {
- /* bitbang has to be first */
- struct spi_bitbang bitbang;
- struct completion done;
- void __iomem *regs;
- int irq;
- int len;
- int count;
- void (*set_cs)(struct s3c2410_spi_info *spi,
- int cs, int pol);
- /* data buffers */
- const unsigned char *tx;
- unsigned char *rx;
- struct clk *clk;
- struct resource *ioarea;
- struct spi_master *master;
- struct spi_device *curdev;
- struct device *dev;
- struct s3c2410_spi_info *pdata;
- };
接着执行了该条语句:
hw->pdata = pdata = pdev->dev.platform_data; /*获取s3c2410_spi_info结构体指针*/
NOTE:在这里获取platform_device.dev.platform_data,也就是平台设备的相关数据,而在4.1小结中的arch/arm/plat-s3c24XX/devs.c文件中并没有发现platform_data的身影,因此这正式需要我们移植的地方。
随后初始化了completion,这个东东将用于实现同步I/O,详见下文。之后,为master定义了setup方法,为bitbang定义了3个方法。
接着获取了一系列的资源,同时注册了中断服务程序。接着调用s3c24xx_spi_initialsetup初始化控制器。我们来看下该函数。
该函数位于下列函数位于deivers/spi/s3c24xx.c。
- static void s3c24xx_spi_initialsetup(struct s3c24xx_spi *hw)
- {
- /* for the moment, permanently enable the clock */
- clk_enable(hw->clk); /*使能时钟*/
- /* program defaults into the registers */
- writeb(0xff, hw->regs + S3C2410_SPPRE); /*设置预分频系数,baudrate=pclk/2/(prescaler value+1)*/
- writeb(SPPIN_DEFAULT, hw->regs + S3C2410_SPPIN);/*使能master out keep*/
- writeb(SPCON_DEFAULT, hw->regs + S3C2410_SPCON);/*master, interrupt mode*/
- if (hw->pdata) {
- if (hw->set_cs == s3c24xx_spi_gpiocs) /*set_cs 在probe方法中设置为s3c24xx_spi_gpiocs*/
- gpio_direction_output(hw->pdata->pin_cs, 1); /*设置该管脚为输出,貌似多次一举,在probe已经调用过该函数*/
- */
- if (hw->pdata->gpio_setup)
- hw->pdata->gpio_setup(hw->pdata, 1);
- }
- }
最后调用了spi_bitbang_start函数,该函数非常重要,在下一小节中单独讲解。
4.2.2 spi_bitbang_start函数
下列函数位于drivers/spi/spi_bitbang.c
- /**
- * spi_bitbang_start - start up a polled/bitbanging SPI master driver
- * @bitbang: driver handle
- *
- * Caller should have zero-initialized all parts of the structure, and then
- * provided callbacks for chip selection and I/O loops. If the master has
- * a transfer method, its final step should call spi_bitbang_transfer; or,
- * that's the default if the transfer routine is not initialized. It should
- * also set up the bus number and number of chipselects.
- *
- * For i/o loops, provide callbacks either per-word (for bitbanging, or for
- * hardware that basically exposes a shift register) or per-spi_transfer
- * (which takes better advantage of hardware like fifos or DMA engines).
- *
- * Drivers using per-word I/O loops should use (or call) spi_bitbang_setup,
- * spi_bitbang_cleanup and spi_bitbang_setup_transfer to handle those spi
- * master methods. Those methods are the defaults if the bitbang->txrx_bufs
- * routine isn't initialized.
- *
- * This routine registers the spi_master, which will process requests in a
- * dedicated task, keeping IRQs unblocked most of the time. To stop
- * processing those requests, call spi_bitbang_stop().
- */
- int spi_bitbang_start(struct spi_bitbang *bitbang)
- {
- int status;
- if (!bitbang->master || !bitbang->chipselect)
- return -EINVAL;
- INIT_WORK(&bitbang->work, bitbang_work); /*初始化工作,工作为bitbang_work*/
- spin_lock_init(&bitbang->lock); /*初始化自旋锁*/
- INIT_LIST_HEAD(&bitbang->queue); /*初始化链表头,链表为双向循环链表*/
- if (!bitbang->master->transfer) /*master的transfer方法没有定义过*/
- bitbang->master->transfer = spi_bitbang_transfer; /*使用spi_bitbang_transfe方法*/
- if (!bitbang->txrx_bufs) { /*如果bitbang没有txrx_bufs方法,在probe函数中定义过该方法*/
- bitbang->use_dma = 0;
- bitbang->txrx_bufs = spi_bitbang_bufs;
- if (!bitbang->master->setup) {
- if (!bitbang->setup_transfer)
- bitbang->setup_transfer =
- spi_bitbang_setup_transfer;
- bitbang->master->setup = spi_bitbang_setup;
- bitbang->master->cleanup = spi_bitbang_cleanup;
- }
- } else if (!bitbang->master->setup) /*setup方法在probe函数中有定义*/
- return -EINVAL;
- /* this task is the only thing to touch the SPI bits */
- bitbang->busy = 0;
- bitbang->workqueue = create_singlethread_workqueue( /*创建工作队列*/
- dev_name(bitbang->master->dev.parent));
- if (bitbang->workqueue == NULL) {
- status = -EBUSY;
- goto err1;
- }
- /* driver may get busy before register() returns, especially
- * if someone registered boardinfo for devices
- */
- status = spi_register_master(bitbang->master); /*注册spi控制器*/
- if (status < 0)
- goto err2;
- return status;
- err2:
- destroy_workqueue(bitbang->workqueue);
- err1:
- return status;
- }
- EXPORT_SYMBOL_GPL(spi_bitbang_start);
最后,调用了spi_register_master函数,该函数将完成SPI控制器的注册,其中还牵涉到spi_device的注册。因此该函数也非常重要。我们来看看这个函数
下列函数位于drivers/spi/spi_bitbang.c
- /**
- * spi_register_master - register SPI master controller
- * @master: initialized master, originally from spi_alloc_master()
- * Context: can sleep
- *
- * SPI master controllers connect to their drivers using some non-SPI bus,
- * such as the platform bus. The final stage of probe() in that code
- * includes calling spi_register_master() to hook up to this SPI bus glue.
- *
- * SPI controllers use board specific (often SOC specific) bus numbers,
- * and board-specific addressing for SPI devices combines those numbers
- * with chip select numbers. Since SPI does not directly support dynamic
- * device identification, boards need configuration tables telling which
- * chip is at which address.
- *
- * This must be called from context that can sleep. It returns zero on
- * success, else a negative error code (dropping the master's refcount).
- * After a successful return, the caller is responsible for calling
- * spi_unregister_master().
- */
- int spi_register_master(struct spi_master *master)
- {
- static atomic_t dyn_bus_id = ATOMIC_INIT((1<<15) - 1);
- struct device *dev = master->dev.parent;
- int status = -ENODEV;
- int dynamic = 0;
- if (!dev)
- return -ENODEV;
- /* even if it's just one always-selected device, there must
- * be at least one chipselect
- */
- if (master->num_chipselect == 0)
- return -EINVAL;
- /* convention: dynamically assigned bus IDs count down from the max */
- if (master->bus_num < 0) {
- /* FIXME switch to an IDR based scheme, something like
- * I2C now uses, so we can't run out of "dynamic" IDs
- */
- master->bus_num = atomic_dec_return(&dyn_bus_id);
- dynamic = 1;
- }
- /* register the device, then userspace will see it.
- * registration fails if the bus ID is in use.
- */
- dev_set_name(&master->dev, "spi%u", master->bus_num);
- status = device_add(&master->dev); /*注册设备*/
- if (status < 0)
- goto done;
- dev_dbg(dev, "registered master %s%s\n", dev_name(&master->dev),
- dynamic ? " (dynamic)" : "");
- /* populate children from any spi device tables */
- scan_boardinfo(master);
- status = 0;
- done:
- return status;
- }
- EXPORT_SYMBOL_GPL(spi_register_master);
该函数中,执行了相关的检查,然后注册了master设备,随后调用了scan_boardinfo。函数如下:
下列函数位于drivers/spi/spi.c
- /* FIXME someone should add support for a __setup("spi", ...) that
- * creates board info from kernel command lines
- */
- static void scan_boardinfo(struct spi_master *master)
- {
- struct boardinfo *bi;
- mutex_lock(&board_lock);
- /*以board_list为链表头,遍历所有的boardinfo结构,链表由spi_register_board_info添加*/
- list_for_each_entry(bi, &board_list, list) {
- struct spi_board_info *chip = bi->board_info;
- unsigned n;
- /*遍历该boardinfo指向的spi_board_info数组*/
- for (n = bi->n_board_info; n > 0; n--, chip++) {
- if (chip->bus_num != master->bus_num) /*通过bus_num对spi设备和master进行匹配*/
- continue;
- /* NOTE: this relies on spi_new_device to
- * issue diagnostics when given bogus inputs
- */
- /*执行到此,表示匹配完成,SPI设备由该SPI接口来控制,开始创建spi_device*/
- (void) spi_new_device(master, chip);
- }
- }
- mutex_unlock(&board_lock);
- }
NOTE:这个函数通过boardinfo遍历的spi_board_info数组,而spi_board_info是在内核初始化过程中由spi_register_board_info进行注册的,在
linux/arch/arm/mach-s3c2440/mach-smdk2440.c中并没有调用过该函数,因此这也是需要移植的地方。
S3C2440共有两个接口:spi0和spi1。chip->bus_num表示该设备使用哪个spi接口,而master->bus_num正好表示了当前的接口。
该函数中,遍历spi_board_info,通过bus_num完成SPI设备和SPI控制器的匹配,匹配成功则开始建立spi_device设备,该过程通过调用spi_new_device实现。我们接着看下这个函数。
下列函数位于drivers/spi/spi.c
- /**
- * spi_new_device - instantiate one new SPI device
- * @master: Controller to which device is connected
- * @chip: Describes the SPI device
- * Context: can sleep
- *
- * On typical mainboards, this is purely internal; and it's not needed
- * after board init creates the hard-wired devices. Some development
- * platforms may not be able to use spi_register_board_info though, and
- * this is exported so that for example a USB or parport based adapter
- * driver could add devices (which it would learn about out-of-band).
- *
- * Returns the new device, or NULL.
- */
- struct spi_device *spi_new_device(struct spi_master *master,
- struct spi_board_info *chip)
- {
- struct spi_device *proxy;
- int status;
- /* NOTE: caller did any chip->bus_num checks necessary.
- *
- * Also, unless we change the return value convention to use
- * error-or-pointer (not NULL-or-pointer), troubleshootability
- * suggests syslogged diagnostics are best here (ugh).
- */
- proxy = spi_alloc_device(master); /*分配spi_device结构,并初始化一些字段*/
- if (!proxy)
- return NULL;
- WARN_ON(strlen(chip->modalias) >= sizeof(proxy->modalias));
- /*从spi_board_info获取SPI从设备的参数*/
- proxy->chip_select = chip->chip_select;
- proxy->max_speed_hz = chip->max_speed_hz;
- proxy->mode = chip->mode;
- proxy->irq = chip->irq;
- strlcpy(proxy->modalias, chip->modalias, sizeof(proxy->modalias));
- proxy->dev.platform_data = (void *) chip->platform_data;
- proxy->controller_data = chip->controller_data;
- proxy->controller_state = NULL;
- status = spi_add_device(proxy);
- if (status < 0) {
- spi_dev_put(proxy);
- return NULL;
- }
- return proxy;
- }
- EXPORT_SYMBOL_GPL(spi_new_device);
首先,创建了spi_device结构,让后通过板级信息spi_board_info将SPI从设备的相关信息复制给spi_device结构,从而完成了spi_device结构的定义,最后调用spi_add_device,完成spi_device的注册。
看下spi_add_device函数,该函数位于drivers/spi/spi.c
- /**
- * spi_add_device - Add spi_device allocated with spi_alloc_device
- * @spi: spi_device to register
- *
- * Companion function to spi_alloc_device. Devices allocated with
- * spi_alloc_device can be added onto the spi bus with this function.
- *
- * Returns 0 on success; negative errno on failure
- */
- int spi_add_device(struct spi_device *spi)
- {
- static DEFINE_MUTEX(spi_add_lock);
- struct device *dev = spi->master->dev.parent;
- int status;
- /* Chipselects are numbered 0..max; validate. */
- if (spi->chip_select >= spi->master->num_chipselect) {
- dev_err(dev, "cs%d >= max %d\n",
- spi->chip_select,
- spi->master->num_chipselect);
- return -EINVAL;
- }
- /* Set the bus ID string */
- dev_set_name(&spi->dev, "%s.%u", dev_name(&spi->master->dev),
- spi->chip_select);
- /* We need to make sure there's no other device with this
- * chipselect **BEFORE** we call setup(), else we'll trash
- * its configuration. Lock against concurrent add() calls.
- */
- mutex_lock(&spi_add_lock);
- if (bus_find_device_by_name(&spi_bus_type, NULL, dev_name(&spi->dev))
- != NULL) {
- dev_err(dev, "chipselect %d already in use\n",
- spi->chip_select);
- status = -EBUSY;
- goto done;
- }
- /* Drivers may modify this initial i/o setup, but will
- * normally rely on the device being setup. Devices
- * using SPI_CS_HIGH can't coexist well otherwise...
- */
- status = spi->master->setup(spi); /*调用setup方法,即s3c24xx_spi_setup函数*/
- if (status < 0) {
- dev_err(dev, "can't %s %s, status %d\n",
- "setup", dev_name(&spi->dev), status);
- goto done;
- }
- /* Device may be bound to an active driver when this returns */
- status = device_add(&spi->dev); /*注册SPI_device*/
- if (status < 0)
- dev_err(dev, "can't %s %s, status %d\n",
- "add", dev_name(&spi->dev), status);
- else
- dev_dbg(dev, "registered child %s\n", dev_name(&spi->dev));
- done:
- mutex_unlock(&spi_add_lock);
- return status;
- }
- EXPORT_SYMBOL_GPL(spi_add_device);
在注册spi_device之前,调用了master的setup方法,该方法又将调用s3c24xx_spi_setupxfer和s3c24xx_spi_chipsel函数。
s3c24xx_spi_setupxfer函数计算预分频系数并写入寄存器。
s3c24xx_spi_chipsel函数用于禁止或使能CS信号。当使能CS信号时,要设置控制寄存器。这里调用是禁止CS信号。
下列代码位于deivers/spi/s3c24xx.c。- #define SPCON_DEFAULT (S3C2410_SPCON_MSTR | S3C2410_SPCON_SMOD_INT)
- #define SPPIN_DEFAULT (S3C2410_SPPIN_KEEP)
- static inline struct s3c24xx_spi *to_hw(struct spi_device *sdev)
- {
- return spi_master_get_devdata(sdev->master);
- }
- static void s3c24xx_spi_gpiocs(struct s3c2410_spi_info *spi, int cs, int pol)
- {
- gpio_set_value(spi->pin_cs, pol);
- }
- static void s3c24xx_spi_chipsel(struct spi_device *spi, int value)
- {
- struct s3c24xx_spi *hw = to_hw(spi);
- unsigned int cspol = spi->mode & SPI_CS_HIGH ? 1 : 0;
- unsigned int spcon;
- switch (value) {
- case BITBANG_CS_INACTIVE: /*CS无效时*/
- hw->set_cs(hw->pdata, spi->chip_select, cspol^1);/*即调用s3c24xx_spi_gpiocs使CS无效*/
- break;
- case BITBANG_CS_ACTIVE: /*CS有效时*/
- spcon = readb(hw->regs + S3C2410_SPCON); /*获取目前SPCON寄存器的值*/
- /*开始设置工作模式*/
- if (spi->mode & SPI_CPHA)
- spcon |= S3C2410_SPCON_CPHA_FMTB;
- else
- spcon &= ~S3C2410_SPCON_CPHA_FMTB;
- if (spi->mode & SPI_CPOL)
- spcon |= S3C2410_SPCON_CPOL_HIGH;
- else
- spcon &= ~S3C2410_SPCON_CPOL_HIGH;
- /*激活时钟sck输出*/
- spcon |= S3C2410_SPCON_ENSCK;
- /* write new configration */
- writeb(spcon, hw->regs + S3C2410_SPCON); /*保存新的配置*/
- hw->set_cs(hw->pdata, spi->chip_select, cspol);/*即调用s3c24xx_spi_gpiocs使CS有效*/
- break;
- }
- }
- static int s3c24xx_spi_setupxfer(struct spi_device *spi,
- struct spi_transfer *t)
- {
- struct s3c24xx_spi *hw = to_hw(spi);
- unsigned int bpw;
- unsigned int hz;
- unsigned int div;
- /*没有transfer,则使用spi_device进行配置*/
- bpw = t ? t->bits_per_word : spi->bits_per_word;
- hz = t ? t->speed_hz : spi->max_speed_hz;
- if (bpw != 8) {
- dev_err(&spi->dev, "invalid bits-per-word (%d)\n", bpw);
- return -EINVAL;
- }
- div = clk_get_rate(hw->clk) / hz;
- /* is clk = pclk / (2 * (pre+1)), or is it
- * clk = (pclk * 2) / ( pre + 1) */
- /*计算预分频系数*/
- div /= 2;
- if (div > 0)
- div -= 1;
- if (div > 255) /*只有8位*/
- div = 255;
- dev_dbg(&spi->dev, "setting pre-scaler to %d (hz %d)\n", div, hz);
- writeb(div, hw->regs + S3C2410_SPPRE); /*设置预分频系数*/
- spin_lock(&hw->bitbang.lock); /*自旋锁加锁*/
- if (!hw->bitbang.busy) { /*如果不忙*/
- hw->bitbang.chipselect(spi, BITBANG_CS_INACTIVE);/*即调用s3c24xx_spi_chipsel使CS无效*/
- /* need to ndelay for 0.5 clocktick ? */
- }
- spin_unlock(&hw->bitbang.lock);
- return 0;
- }
- /* the spi->mode bits understood by this driver: */
- #define MODEBITS (SPI_CPOL | SPI_CPHA | SPI_CS_HIGH)
- static int s3c24xx_spi_setup(struct spi_device *spi) /*maser.setup方法*/
- {
- int ret;
- if (!spi->bits_per_word)
- spi->bits_per_word = 8; /*没有设置则使用8位*/
- if (spi->mode & ~MODEBITS) { /*检查mode是否有错*/
- dev_dbg(&spi->dev, "setup: unsupported mode bits %x\n",
- spi->mode & ~MODEBITS);
- return -EINVAL;
- }
- ret = s3c24xx_spi_setupxfer(spi, NULL);
- if (ret < 0) {
- dev_err(&spi->dev, "setupxfer returned %d\n", ret);
- return ret;
- }
- dev_dbg(&spi->dev, "%s: mode %d, %u bpw, %d hz\n",
- __func__, spi->mode, spi->bits_per_word,
- spi->max_speed_hz);
- return 0;
- }
至此,在probe函数中, 由spi_bitbang_start调用所引起的一系列函数调用都已讲解完毕。下面总结下整个调用过程:
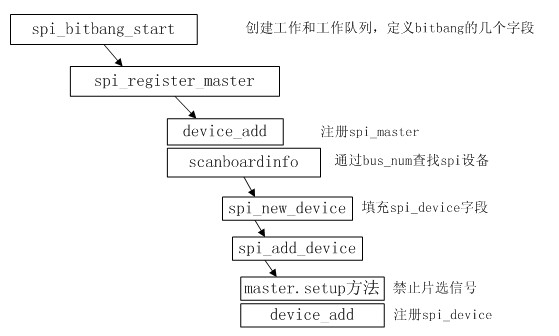
可以看到,调用spi_bitbang_start以后,spi_master和spi_device都将被注册到内核中。
下面来看下platform driver的其他几个方法。
4.2.3 remove,suspend以及resume方法
- static int __exit s3c24xx_spi_remove(struct platform_device *dev)
- {
- struct s3c24xx_spi *hw = platform_get_drvdata(dev);
- platform_set_drvdata(dev, NULL);
- spi_unregister_master(hw->master); /*注销spi主控制器*/
- clk_disable(hw->clk); /*禁止时钟*/
- clk_put(hw->clk); /*释放CLK*/
- free_irq(hw->irq, hw); /*注销IRQ*/
- iounmap(hw->regs); /*解除映射*/
- if (hw->set_cs == s3c24xx_spi_gpiocs)
- gpio_free(hw->pdata->pin_cs); /*释放用于cs的gpio*/
- release_resource(hw->ioarea);
- kfree(hw->ioarea);
- spi_master_put(hw->master); /*减少master引用计数*/
- return 0;
- }
- #ifdef CONFIG_PM /*如果定义了电源管理*/
- static int s3c24xx_spi_suspend(struct platform_device *pdev, pm_message_t msg)
- {
- struct s3c24xx_spi *hw = platform_get_drvdata(pdev);
- if (hw->pdata && hw->pdata->gpio_setup)
- hw->pdata->gpio_setup(hw->pdata, 0);
- clk_disable(hw->clk);
- return 0;
- }
- static int s3c24xx_spi_resume(struct platform_device *pdev)
- {
- struct s3c24xx_spi *hw = platform_get_drvdata(pdev);
- s3c24xx_spi_initialsetup(hw);
- return 0;
- }
- #else
- #define s3c24xx_spi_suspend NULL
- #define s3c24xx_spi_resume NULL
- #endif
- 基于S3C2440的嵌入式Linux驱动——SPI子系统解读(二)
- 基于S3C2440的嵌入式Linux驱动——SPI子系统解读(二)
- 基于S3C2440的嵌入式Linux驱动——SPI子系统解读(二) .
- 基于S3C2440的嵌入式Linux驱动——SPI子系统解读(二)
- 基于S3C2440的嵌入式Linux驱动——SPI子系统解读(二)
- 基于S3C2440的嵌入式Linux驱动——SPI子系统解读(一)
- 基于S3C2440的嵌入式Linux驱动——SPI子系统解读(三)
- 基于S3C2440的嵌入式Linux驱动——SPI子系统解读(四)
- 基于S3C2440的嵌入式Linux驱动——SPI子系统解读(一)
- 基于S3C2440的嵌入式Linux驱动——SPI子系统解读(三)
- 基于S3C2440的嵌入式Linux驱动——SPI子系统解读(四)
- 基于S3C2440的嵌入式Linux驱动——SPI子系统解读(一)
- 基于S3C2440的嵌入式Linux驱动——SPI子系统解读(三)
- 基于S3C2440的嵌入式Linux驱动——SPI子系统解读(四)
- 基于S3C2440的嵌入式Linux驱动——SPI子系统解读(一)
- 基于S3C2440的嵌入式Linux驱动——SPI子系统解读(三)
- 基于S3C2440的嵌入式Linux驱动——SPI子系统解读(四)
- 基于S3C2440的嵌入式Linux驱动——SPI子系统解读(一)
- spark 1.1 mllib中 NaiveBayes 源码阅读
- Xcode5.1离线下载安装及使用iOS5模拟器进行开发调试的方法
- Coco2dx 游戏项目接入SDK时遭遇C/C++ 与 Object-C混编,此时该怎么办?
- 在linux查看内存的大小
- 使用meminfo分析Android单个进程内存信息
- 基于S3C2440的嵌入式Linux驱动——SPI子系统解读(二)
- xcode 找不到头文件
- Vijos P1211生日日数
- 在Controller中处理HTML超链接点击事件
- Android 上进行图片旋转
- 基于S3C2440的嵌入式Linux驱动——SPI子系统解读(三)
- Eclipse 代码提示功能设置
- StringUtils中 isNotEmpty 和isNotBlank的区别
- 第十九周oj刷题:money problem


