一之续、A*,Dijkstra,BFS算法性能比较及A*算法的应用
来源:互联网 发布:玩骰子的软件 编辑:程序博客网 时间:2024/05/16 16:59
原作者地址:http://blog.csdn.net/v_JULY_v/article/details/6238029
一之续、A*,Dijkstra,双向BFS算法性能比较及A*算法的应用
作者:July 二零一一年三月十日。
出处:http://blog.csdn.net/v_JULY_v
--------------------------------------------------
引言:
最短路径的各路算法A*算法、Dijkstra 算法、BFS算法,都已在本BLOG内有所阐述了。其中,Dijkstra 算法,后又写了一篇文章继续阐述:二(续)、理解Dijkstra算法。但,想必,还是有部分读者对此类最短路径算法,并非已了然于胸,或者,无一个总体大概的印象。
本文,即以演示图的形式,比较它们各自的寻路过程,让各位对它们有一个清晰而直观的印象。
我们比较,以下五种算法:
1. A* (使用曼哈顿距离)
2. A* (采用欧氏距离)
3. A* (利用切比雪夫距离)
4. Dijkstra
5. Bi-Directional Breadth-First-Search(双向广度优先搜索)
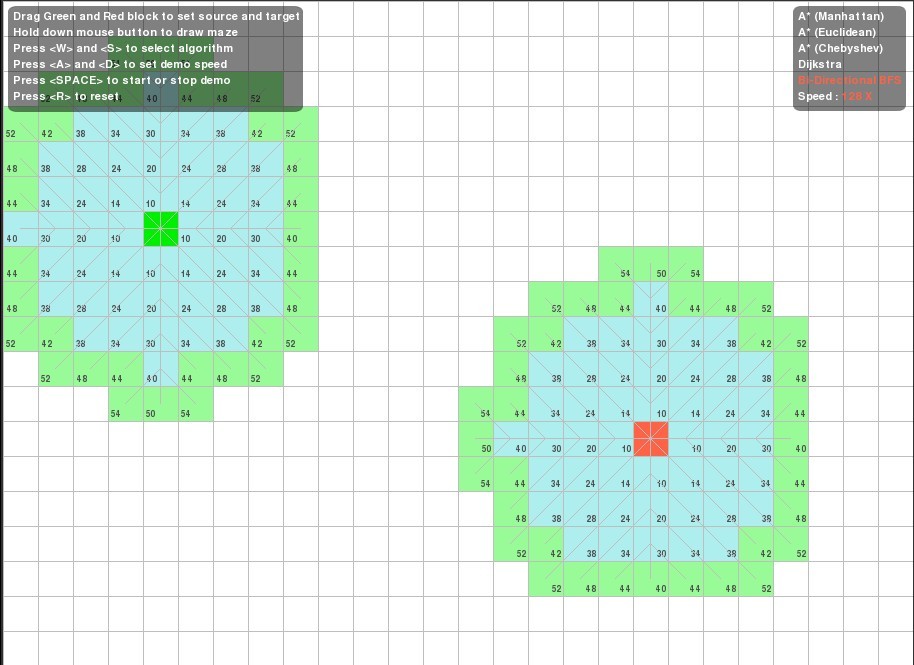
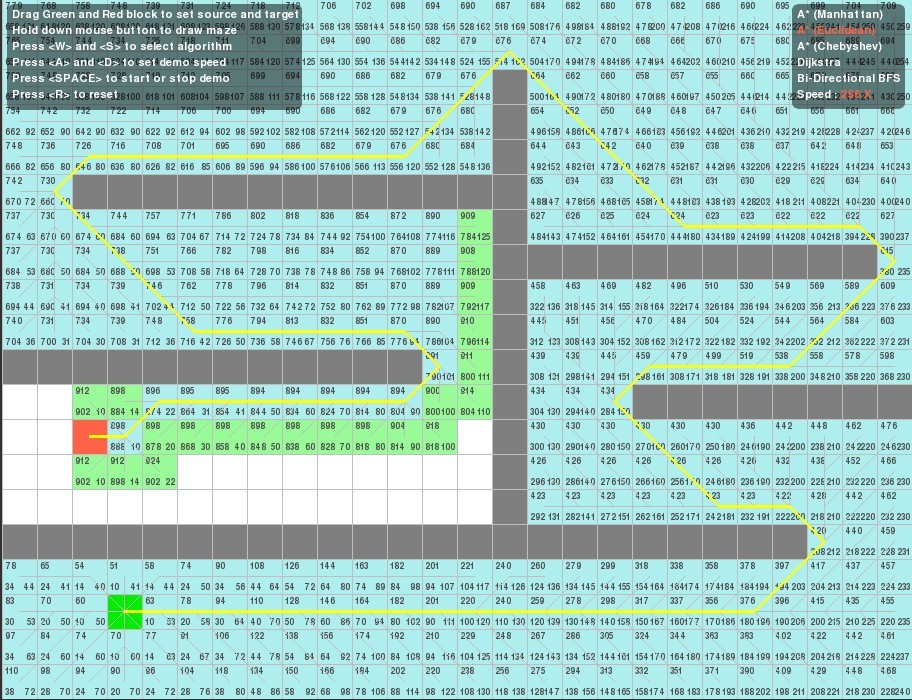
咱们以下图为例,图上绿色方块代表起始点,红色方块代表目标点,紫色的方块代表障碍物,白色的方块代表可以通行的路径。
下面,咱们随意摆放起始点绿块,目标点红块的位置,然后,在它们中间随便画一些障碍物,
最后,运行程序,比较使用上述五种算法,得到各自不同的路径,各自找寻过程中所覆盖的范围,各自的工作流程,并从中可以窥见它们的效率高低。
A*、Dijkstra、BFS算法性能比较演示:
ok,任意摆放绿块与红块的三种状态(演示工具来源:http://code.google.com/p/mycodeplayground/):
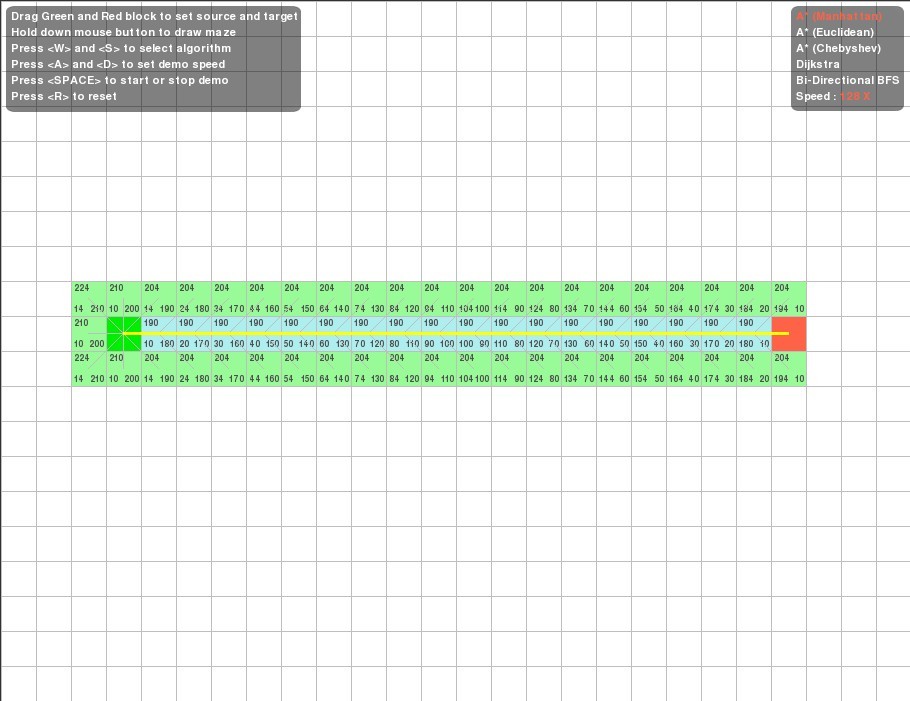
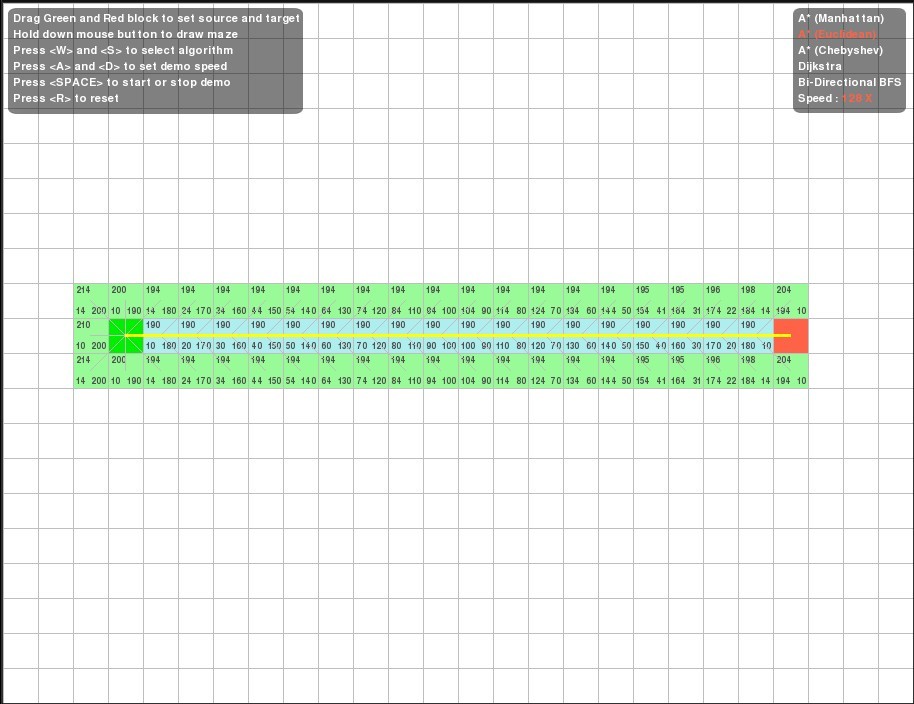
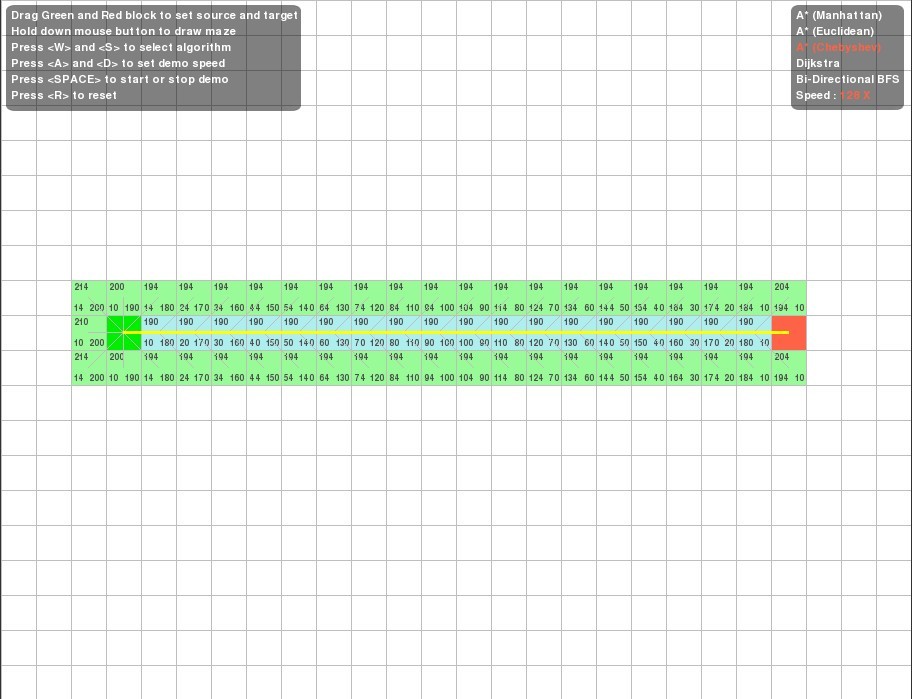
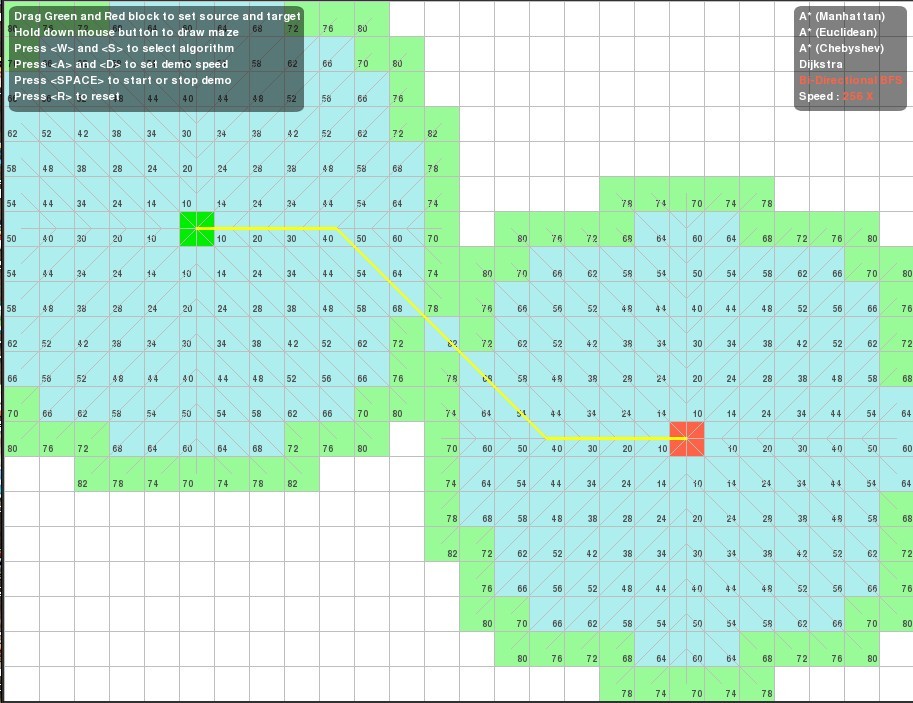
一、起始点绿块,与目标点红块在同一条水平线上:
各自的搜寻路径为:
1. A* (使用曼哈顿距离)
2. A* (采用欧氏距离)
3. A* (利用切比雪夫距离)
4. Dijkstra 算法.//很明显,Dijkstra 搜寻效率明显差于上述A* 算法。(看它最后找到目标点红块所走过的路径,和覆盖的范围,即能轻易看出来,下面的比较,也是基于同一个道理。看路径,看覆盖的范围,评价一个算法的效率)。

5. Bi-Directional Breadth-First-Search(双向广度优先搜索) 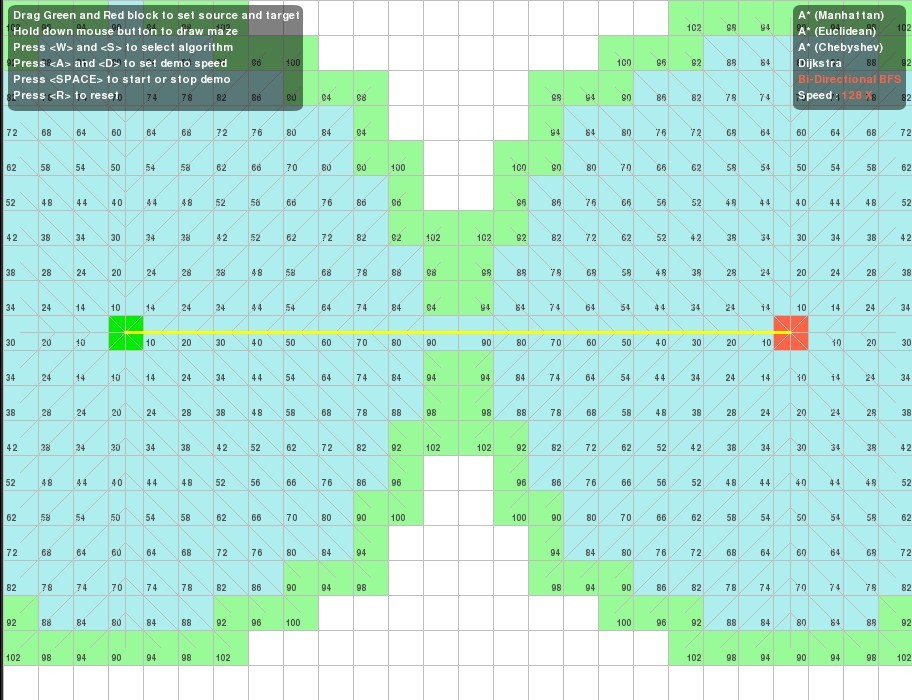
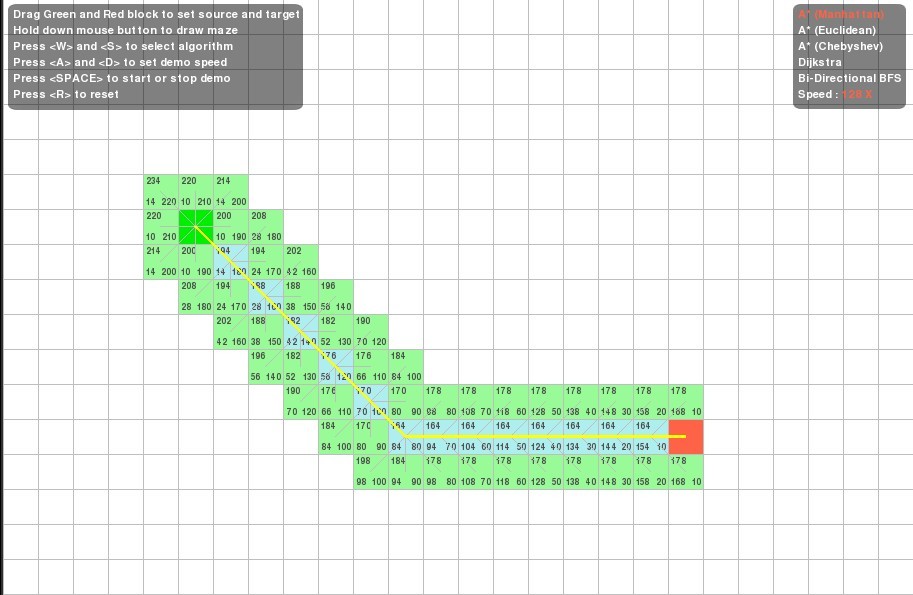
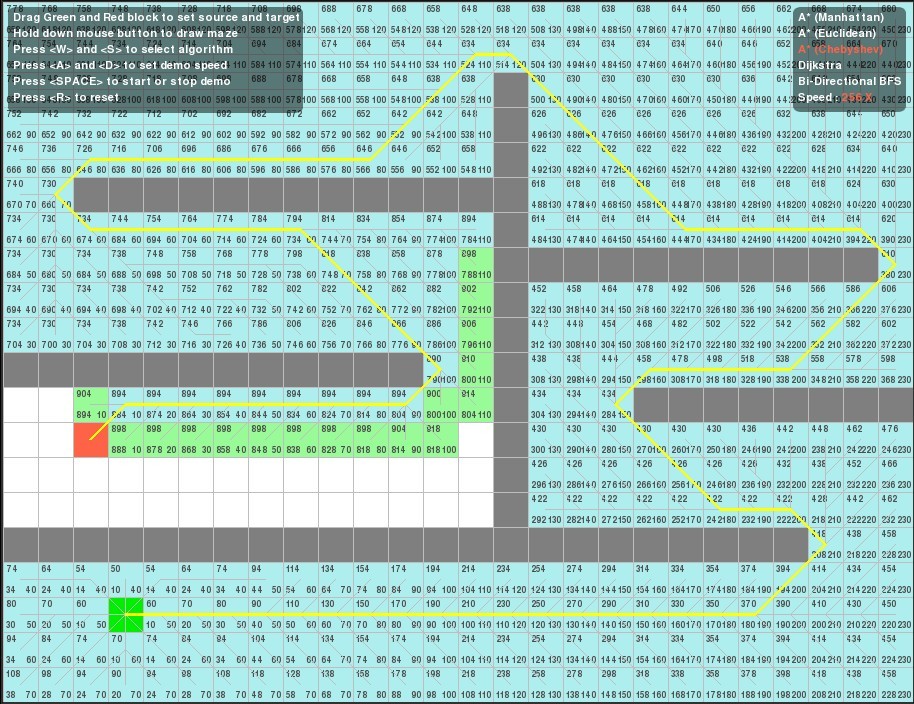
二、起始点绿块,目标点红块在一斜线上:
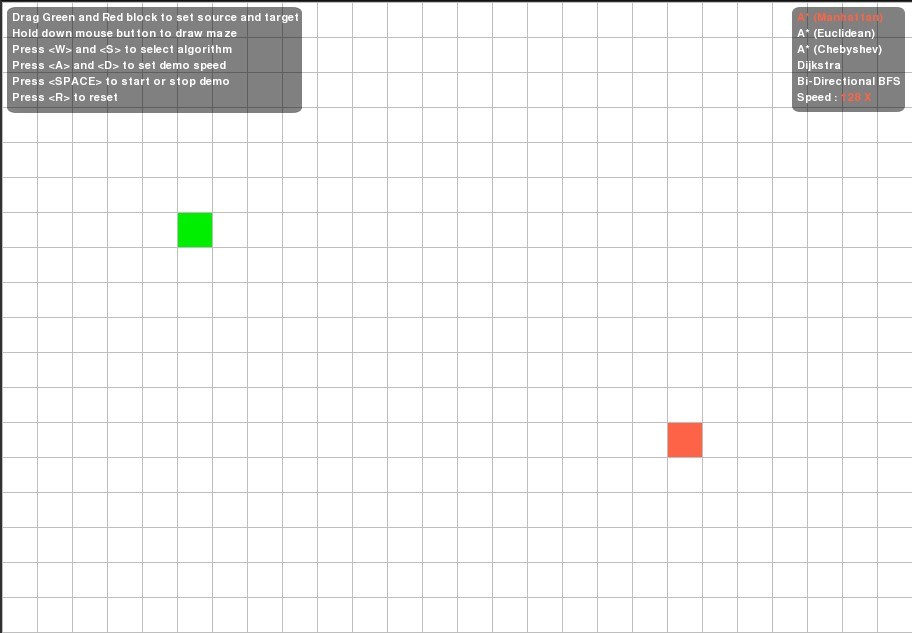
各自的搜寻路径为:
1. A* (使用曼哈顿距离)
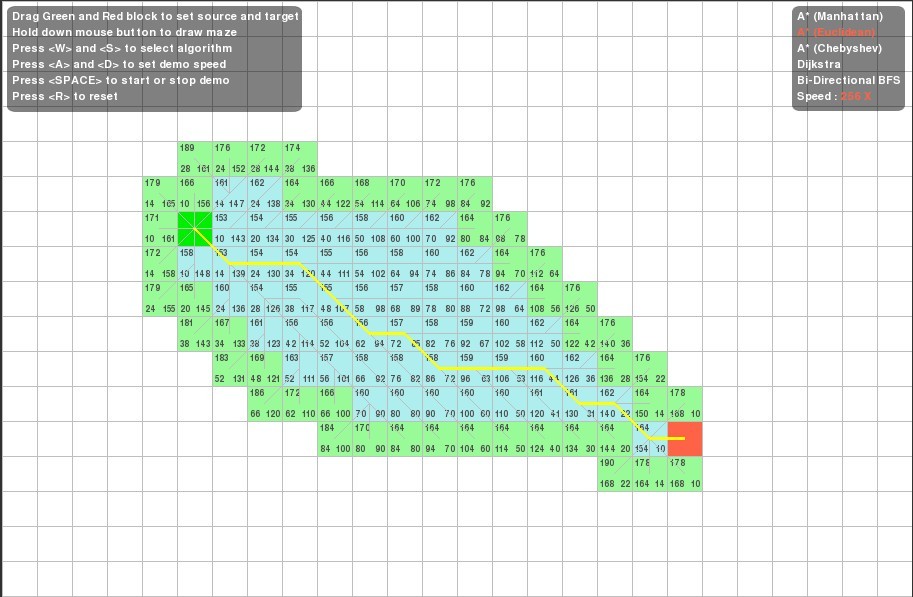
2. A* (采用欧氏距离)
3. A* (利用切比雪夫距离)

4. Dijkstra 算法。 //与上述A* 算法比较,覆盖范围大,搜寻效率较低。

5. Bi-Directional Breadth-First-Search(双向广度优先搜索)
三、起始点绿块,目标点红块被多重障碍物阻挡:
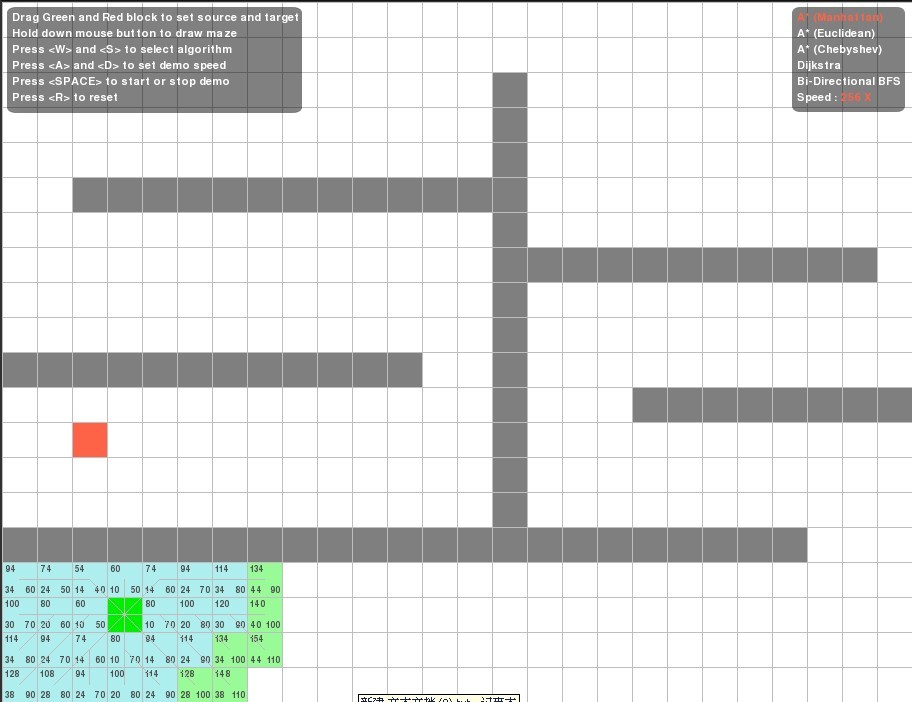
各自的搜寻路径为(同样,还是从绿块到红块):
1. A* (使用曼哈顿距离)
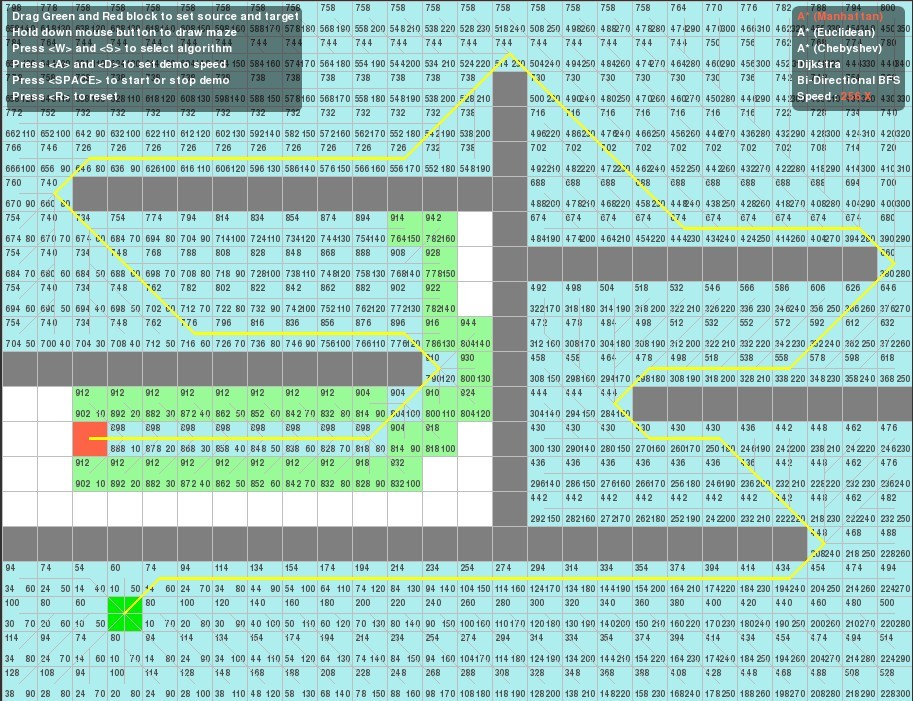
2. A* (采用欧氏距离)..
3. A* (利用切比雪夫距离)
4. Dijkstra....
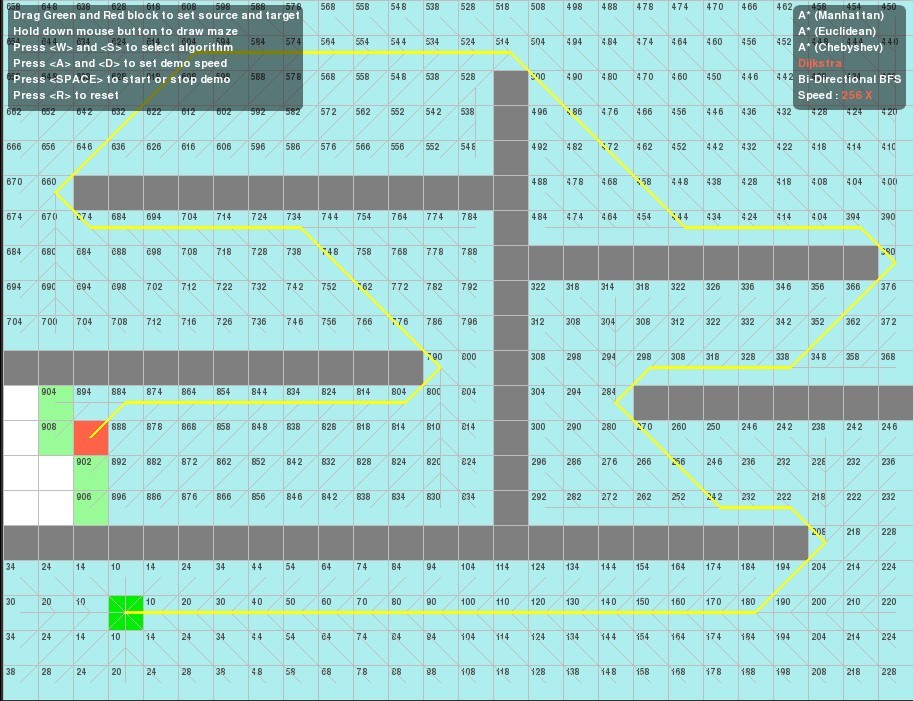
5. Bi-Directional Breadth-First-Search(双向广度优先搜索) //覆盖范围同上述Dijkstra 算法一样很大,效率低下。
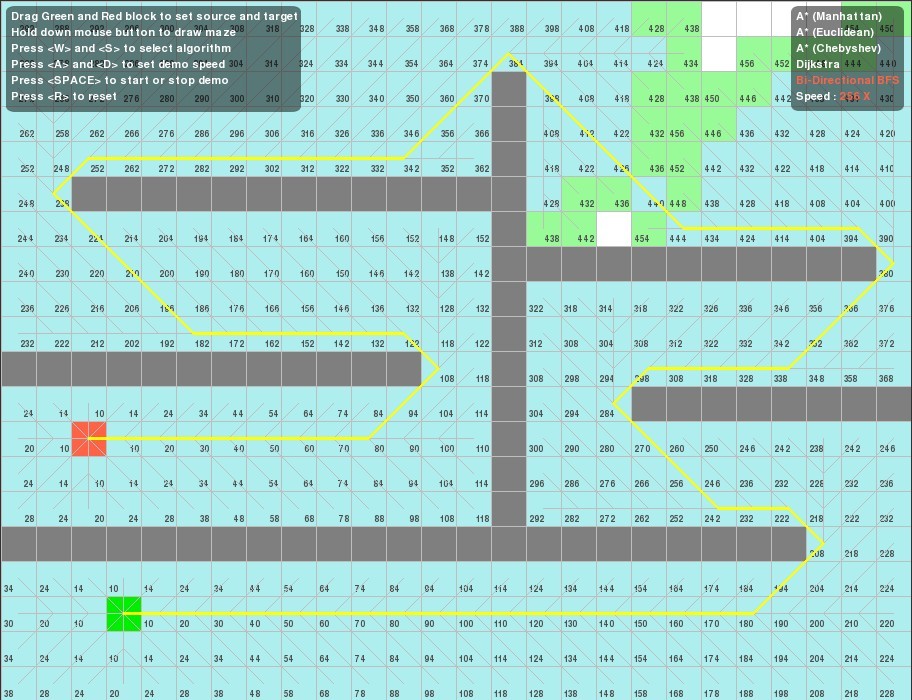
A*搜寻算法的高效之处
如上,是不是对A*、Dijkstra、双向BFS算法各自的性能有了个总体大概的印象列?由上述演示,我们可以看出,在最短路径搜寻效率上,一般有A*>Dijkstra、双向BFS,其中Dijkstra、双向BFS到底哪个算法更优,还得看具体情况。
由上,我们也可以看出,A*搜寻算法的确是一种比较高效的寻路算法。
A*算法最为核心的过程,就在每次选择下一个当前搜索点时,是从所有已探知的但未搜索过点中(可能是不同层,亦可不在同一条支路上),选取f值最小的结点进行展开。
而所有“已探知的但未搜索过点”可以通过一个按f值升序的队列(即优先队列)进行排列。
这样,在整体的搜索过程中,只要按照类似广度优先的算法框架,从优先队列中弹出队首元素(f值),对其可能子结点计算g、h和f值,直到优先队列为空(无解)或找到终止点为止。
A*算法与广度、深度优先和Dijkstra 算法的联系就在于:当g(n)=0时,该算法类似于DFS,当h(n)=0时,该算法类似于BFS。且同时,如果h(n)为0,只需求出g(n),即求出起点到任意顶点n的最短路径,则转化为单源最短路径问题,即Dijkstra算法。这一点,可以通过上面的A*搜索树的具体过程中将h(n)设为0或将g(n)设为0而得到。
BFS、DFS与A*搜寻算法的比较
参考了算法驿站上的部分内容:
不管以下论述哪一种搜索,都统一用这样的形式表示:搜索的对象是一个图,它面向一个问题,不一定有明确的存储形式,但它里面的一个结点都有可能是一个解(可行解),搜索的目的有两个方面,或者求可行解,或者从可行解集中求最优解。
我们用两张表来进行搜索,一个叫OPEN表,表示那些已经展开但还没有访问的结点集,另一个叫CLOSE表,表示那些已经访问的结点集。
蛮力搜索(BFS,DFS)
BFS(Breadth-First-Search 宽度优先搜索)
首先将起始结点放入OPEN表,CLOSE表置空,算法开始时:
1、如果OPEN表不为空,从表中开始取一个结点S,如果为空算法失败
2、S是目标解吗?是,找到一个解(继续寻找,或终止算法);不是到3
3、将S的所有后继结点展开,就是从S可以直接关联的结点(子结点),如果不在CLOSE表中,就将它们放入OPEN表末尾,而把S放入CLOSE表,重复算法到1。
DFS(Depth-First-Search 深度优先搜索)
首先将起始结点放入OPEN表,CLOSE表置空,算法开始时:
1、如果OPEN表不为空,从表中开始取一个结点S,如果为空算法失败
2、S是目标解吗?是,找到一个解(继续寻找,或终止算法);不是到3
3、将S的所有后继结点展开,就是从S可以直接关联的结点(子结点),如果不在CLOSE表中,就将它们放入OPEN表开始,而把S放入CLOSE表,重复算法到1。
是否有看出:上述的BFS和DFS有什么不同?
仔细观察OPEN表中待访问的结点的组织形式,BFS是从表头取结点,从表尾添加结点,也就是说OPEN表是一个队列,是的,BFS首先让你想到‘队列’;而DFS,它是从OPEN表头取结点,也从表头添加结点,也就是说OPEN表是一个栈!
DFS用到了栈,所以有一个很好的实现方法,那就是递归,系统栈是计算机程序中极重要的部分之一。用递归也有个好处就是,在系统栈中只需要存结点最大深度那么大的空间,也就是在展开一个结点的后续结点时可以不用一次全部展开,用一些环境变量记录当前的状态,在递归调用结束后继续展开。
利用系统栈实现的DFS
函数 dfs(结点 s)
{
s超过最大深度了吗?是:相应处理,返回;
s是目标结点吗?是:相应处理;否则:
{
s放入CLOSE表;
for(c=s.第一个子结点 ;c不为空 ;c=c.下一个子结点() )
if(c不在CLOSE表中)
dfs(c);递归
}
}
如果指定最大搜索深度为n,那系统栈最多使用n个单位,它相当于有状态指示的OPEN表,状态就是c,在栈里存了前面搜索时的中间变量c,在后面的递归结束后,c继续后移。在象棋等棋类程序中,就是用这样的DFS的基本模式搜索棋局局面树的,因为如果用OPEN表,有可能还没完成搜索OPEN表就暴满了,这是难于控制的情况。
我们说DFS和BFS都是蛮力搜索,因为它们在搜索到一个结点时,在展开它的后续结点时,是对它们没有任何‘认识’的,它认为它的孩子们都是一样的‘优秀’,但事实并非如此,后续结点是有好有坏的。好,就是说它离目标结点‘近’,如果优先处理它,就会更快的找到目标结点,从而整体上提高搜索性能。
启发式搜索
为了改善上面的算法,我们需要对展开后续结点时对子结点有所了解,这里需要一个估值函数,估值函数就是评价函数,它用来评价子结点的好坏,因为准确评价是不可能的,所以称为估值。打个比方,估值函数就像一台显微镜,一双‘慧眼’,它能分辨出看上去一样的孩子们的手,哪个很脏,有细菌,哪个没有,很干净,然后对那些干净的孩子进行奖励。这里相当于是需要‘排序’,排序是要有代价的,而花时间做这样的工作会不会对整体搜索效率有所帮助呢,这完全取决于估值函数。
排序,怎么排?用哪一个?快排吧,qsort!不一定,要看要排多少结点,如果很少,简单排序法就很OK了。看具体情况了。
排序可能是对OPEN表整体进行排序,也可以是对后续展开的子结点排序,排序的目的就是要使程序有启发性,更快的搜出目标解。
如果估值函数只考虑结点的某种性能上的价值,而不考虑深度,比较有名的就是有序搜索(Ordered-Search),它着重看好能否找出解,而不看解离起始结点的距离(深度)。
如果估值函数考虑了深度,或者是带权距离(从起始结点到目标结点的距离加权和),那就是A*,举个问题例子,八数码问题,如果不考虑深度,就是说不要求最少步数,移动一步就相当于向后多展开一层结点,深度多算一层,如果要求最少步数,那就需要用A*。
简单的来说A*就是将估值函数分成两个部分,一个部分是路径价值,另一个部分是一般性启发价值,合在一起算估整个结点的价值。
从A*的角度看前面的搜索方法,如果路径价值为0就是有序搜索,如果路径价值就用所在结点到起始结点的距离(深度)表示,而启发值为0,那就是BFS或者DFS,它们两刚好是个反的,BFS是从OPEN表中选一个深度最小的进行展开,
而DFS是从OPEN表中选一个深度最大的进行展开。当然只有BFS才算是特殊的A*,所以BFS可以求要求路径最短的问题,只是没有任何启发性。 下文稍后,会具体谈A*搜寻算法思想。
BFS、DFS、Kruskal、Prim、Dijkstra算法时间复杂度
上面,既然提到了A*算法与广度、深度优先搜索算法的联系,那么,下面,也顺便再比较下BFS、DFS、Kruskal、Prim、Dijkstra算法时间复杂度吧:
一般说来,我们知道,BFS,DFS算法的时间复杂度为O(V+E),
最小生成树算法Kruskal、Prim算法的时间复杂度为O(E*lgV)。
而Prim算法若采用斐波那契堆实现的话,算法时间复杂度为O(E+V*lgV),当|V|<<|E|时,E+V*lgV是一个较大的改进。
//|V|<<|E|,=>O(E+V*lgV) << O(E*lgV),对吧。:D
Dijkstra 算法,斐波纳契堆用作优先队列时,算法时间复杂度为O(V*lgV + E)。
//看到了吧,与Prim算法采用斐波那契堆实现时,的算法时间复杂度是一样的。
所以我们,说,BFS、Prime、Dijkstra 算法是有相似之处的,单从各算法的时间复杂度比较看,就可窥之一二。
A*搜寻算法的思想
ok,既然,A*搜寻算法作为是一种好的、高效的寻路算法,咱们就来想办法实现它吧。
实现一个算法,首先得明确它的算法思想,以及算法的步骤与流程,从我之前的一篇文章中,可以了解到:
A*算法,作为启发式算法中很重要的一种,被广泛应用在最优路径求解和一些策略设计的问题中。
而A*算法最为核心的部分,就在于它的一个估值函数的设计上:
f(n)=g(n)+h(n)
其中f(n)是每个可能试探点的估值,它有两部分组成:
一部分,为g(n),它表示从起始搜索点到当前点的代价(通常用某结点在搜索树中的深度来表示)。
另一部分,即h(n),它表示启发式搜索中最为重要的一部分,即当前结点到目标结点的估值,
h(n)设计的好坏,直接影响着具有此种启发式函数的启发式算法的是否能称为A*算法。
一种具有f(n)=g(n)+h(n)策略的启发式算法能成为A*算法的充分条件是:
1、搜索树上存在着从起始点到终了点的最优路径。
2、问题域是有限的。
3、所有结点的子结点的搜索代价值>0。
4、h(n)=<h*(n) (h*(n)为实际问题的代价值)。
当此四个条件都满足时,一个具有f(n)=g(n)+h(n)策略的启发式算法能成为A*算法,并一定能找到最优解。
对于一个搜索问题,显然,条件1,2,3都是很容易满足的,而条件4: h(n)<=h*(n)是需要精心设计的,由于h*(n)显然是无法知道的,所以,一个满足条件4的启发策略h(n)就来的难能可贵了。
不过,对于图的最优路径搜索和八数码问题,有些相关策略h(n)不仅很好理解,而且已经在理论上证明是满足条件4的,从而为这个算法的推广起到了决定性的作用。
A*搜寻算法的应用
ok,咱们就来应用A*搜寻算法实现八数码问题,下面,就是其主体代码,由于给的注释很详尽,就不再啰嗦了,有任何问题,请不吝指正:
//节点结构体typedef struct Node{ int data[9]; double f,g; struct Node * parent;}Node,*Lnode;//OPEN CLOSED 表结构体typedef struct Stack{ Node * npoint; struct Stack * next;}Stack,* Lstack;//选取OPEN表上f值最小的节点,返回该节点地址Node * Minf(Lstack * Open){ Lstack temp = (*Open)->next,min = (*Open)->next,minp = (*Open); Node * minx; while(temp->next != NULL) { if((temp->next ->npoint->f) < (min->npoint->f)) { min = temp->next; minp = temp; } temp = temp->next; } minx = min->npoint; temp = minp->next; minp->next = minp->next->next; free(temp); return minx;}//判断是否可解int Canslove(Node * suc, Node * goal){ int a = 0,b = 0,i,j; for(i = 1; i< 9;i++) for(j = 0;j < i;j++) { if((suc->data[i] > suc->data[j]) && suc->data[j] != 0) a++; if((goal->data[i] > goal->data[j]) && goal->data[j] != 0) b++; } if(a%2 == b%2) return 1; else return 0;}//判断节点是否相等 ,1相等,0不相等int Equal(Node * suc,Node * goal){ for(int i = 0; i < 9; i ++ ) if(suc->data[i] != goal->data[i])return 0; return 1;}//判断节点是否属于OPEN表 或 CLOSED表,是则返回节点地址,否则返回空地址Node * Belong(Node * suc,Lstack * list){ Lstack temp = (*list) -> next ; if(temp == NULL)return NULL; while(temp != NULL) { if(Equal(suc,temp->npoint))return temp -> npoint; temp = temp->next; } return NULL;}//把节点放入OPEN 或CLOSED 表中void Putinto(Node * suc,Lstack * list){ Stack * temp; temp =(Stack *) malloc(sizeof(Stack)); temp->npoint = suc; temp->next = (*list)->next; (*list)->next = temp;}///////////////计算f值部分-开始//////////////////////////////double Fvalue(Node suc, Node goal, float speed){//计算f值 double Distance(Node,Node,int); double h = 0; for(int i = 1; i <= 8; i++) h = h + Distance(suc, goal, i); return h*speed + suc.g; //f = h + g(speed值增加时搜索过程以找到目标为优先因此可能不会返回最优解) }double Distance(Node suc, Node goal, int i){//计算方格的错位距离 int k,h1,h2; for(k = 0; k < 9; k++) { if(suc.data[k] == i)h1 = k; if(goal.data[k] == i)h2 = k; } return double(fabs(h1/3 - h2/3) + fabs(h1%3 - h2%3));}///////////////计算f值部分-结束////////////////////////////// ///////////////////////扩展后继节点部分的函数-开始/////////////////int BelongProgram(Lnode * suc ,Lstack * Open ,Lstack * Closed ,Node goal ,float speed){//判断子节点是否属于OPEN或CLOSED表 并作出相应的处理 Node * temp = NULL; int flag = 0; if((Belong(*suc,Open) != NULL) || (Belong(*suc,Closed) != NULL)) { if(Belong(*suc,Open) != NULL) temp = Belong(*suc,Open); else temp = Belong(*suc,Closed); if(((*suc)->g) < (temp->g)) { temp->parent = (*suc)->parent; temp->g = (*suc)->g; temp->f = (*suc)->f; flag = 1; } } else { Putinto(* suc, Open); (*suc)->f = Fvalue(**suc, goal, speed); } return flag; }void Spread(Lnode * suc, Lstack * Open, Lstack * Closed, Node goal, float speed){//扩展后继节点总函数 int i; Node * child; for(i = 0; i < 4; i++) { if(Canspread(**suc, i+1)) //判断某个方向上的子节点可否扩展 { child = (Node *) malloc(sizeof(Node)); //扩展子节点 child->g = (*suc)->g +1; //算子节点的g值 child->parent = (*suc); //子节点父指针指向父节点 Spreadchild(child, i); //向该方向移动空格生成子节点 if(BelongProgram(&child, Open, Closed, goal, speed)) // 判断子节点是否属于OPEN或CLOSED表 并作出相应的处理 free(child); } }}///////////////////////扩展后继节点部分的函数-结束//////////////////////////////////Node * Process(Lnode * org, Lnode * goal, Lstack * Open, Lstack * Closed, float speed){//总执行函数 while(1) { if((*Open)->next == NULL)return NULL; //判断OPEN表是否为空,为空则失败退出 Node * minf = Minf(Open); //从OPEN表中取出f值最小的节点 Putinto(minf, Closed); //将节点放入CLOSED表中 if(Equal(minf, *goal))return minf; //如果当前节点是目标节点,则成功退出 Spread(&minf, Open, Closed, **goal, speed); //当前节点不是目标节点时扩展当前节点的后继节点 }}int Shownum(Node * result){//递归显示从初始状态到达目标状态的移动方法 if(result == NULL)return 0; else { int n = Shownum(result->parent); for(int i = 0; i < 3; i++) { printf("/n"); for(int j = 0; j < 3; j++) { if(result->data[i*3+j] != 0) printf(" %d ",result->data[i*3+j]); else printf(" "); } } printf("/n"); return n+1; }}完。July、二零一一年三月十日。
- 一之续、A*,Dijkstra,BFS算法性能比较及A*算法的应用
- 一之续、A*,Dijkstra,BFS算法性能比较及A*算法的应用
- 一之续、A*,Dijkstra,BFS算法性能比较及A*算法的应用
- 一之续、A*,Dijkstra,BFS算法性能比较及A*算法的应用
- A*,Dijkstra,双向BFS算法性能比较及A*算法的应用
- A*,Dijkstra,BFS算法性能比较及A*算法的应用
- Dijkstra算法和A*算法的比较
- Dijkstra算法和A*算法的比较
- 动态规划,Dijkstra算法,A*算法的比较
- 动态规划,Dijkstra算法,A*算法的比较
- 动态规划,Dijkstra算法,A*算法的比较
- BFS\DFS\A*\Dijkstra\Prim算法等的简介
- A*算法:Dijkstra改进算法
- A-Star算法的原理及应用
- POJ2243 A*算法BFS
- Unity3d之A*算法在游戏中的应用(一)
- Dijkstra算法及性能评估
- C++ 基于Dijkstra算法和基于BFS算法的Ford Fulkson算法比较
- 社説 20150826 世界同時株安 市場不安の沈静化を急ぎたい
- if语句
- 算法和数据结构就是编程的一个重要部分,你若失掉了算法和数据结构,你就把一切都失掉了。
- ABAP程序案例()
- 为特赦叫好、为祖国喝彩
- 一之续、A*,Dijkstra,BFS算法性能比较及A*算法的应用
- Apache设置 局域网访问
- NBUT1586 买票回家啦
- iOS开发之数据持久化-归档
- Spring学习笔记(六)----Bean的生命周期
- oracle 存储过程 游标嵌套
- ctrl+R刷新checkbox还是被选中,刷新取消选中方法
- 打包带JNI的APK,提示“系統找不到指定的路径”
- 根据参数不同,展示不同button 传参方式为url地址?status=参数;


