PCL库尝试
来源:互联网 发布:ant windows 64位下载 编辑:程序博客网 时间:2024/06/18 05:01
本次试验的目的是利用PCL库来重建地形点云数据,并进行显示。总体流程是1)把DEM数据导入PCL的数据格式.pcd文件中;2)进行法向量估计;3)重建曲面;4)三维显示。
1)写入pcd文件
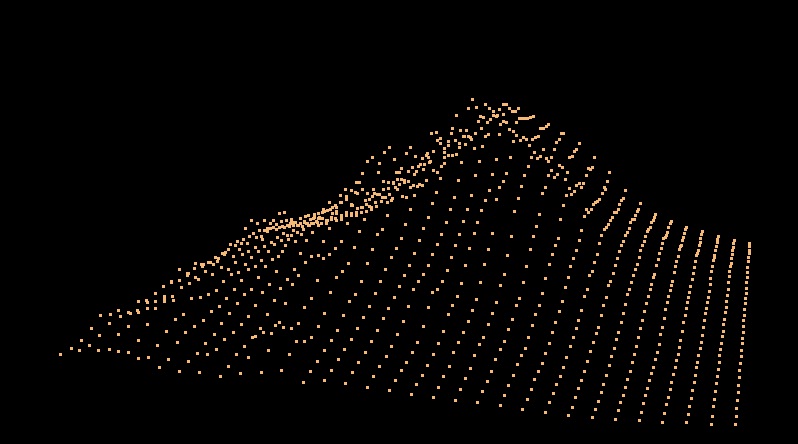
首先打开C:\Program Files\PCL1.6.0\share\doc\pcl-1.6\tutorials\sources 下面的pcd_write工程,对立面的程序进行修改,把DEM数据(x,y,z)导入 pcl::PointCloud<pcl::PointXYZ>cloud成员变量中。
至此会产生一个test.pcd文件。
然后,可以利用同目录下的cloud_viewer编译后的程序来观看test.pcd文件,或者利用pcl安装目录bin目录下的pcd_viewer进行查看。有关pcd_viewer的用法可以再窗口按“h”,然后在命令行中进行查看。主要用的就是“r”:重置视角,“g”出现坐标轴,“alt+-/+”进行缩放等等。
2)利用安装目录bin下的pcl_normal_estimation.exe来估计点阵的法向量,指令如下:pcl_normal_estimation_release.exetest.pcd test1.pcd –k 3。后面的-k是指采用多少个k邻域的元素。
估计结束后,利用pcd_viewer进行查看,此时看没有区别。但是利用utraledit进行查看,发现test1.pcd后面多了几列,分别代表向量的xyz数值和曲率。
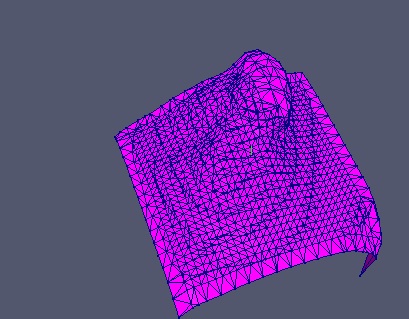
3) 曲面重建
利用安装目录bin下的pcl_poisson_reconstruction_release.exe对test1.pcd进行曲面重建,这时能从命令行看到该pcd文件中的xyz,曲率和法向量信息,指令如下:pcl_poisson_reconstruction_release.exe test1.pcd test1.vtk
4)从网上下载paraview软件,来查看test1.vtk即可。(首先,点击paraview左下“properties”标签的apply按钮,然后经过后面两个标签进行颜色、大小、显示方式设置即可;可以同时打开多个vtk文件进行查看)
- PCL库尝试
- pcl库的配置
- PCL库学习
- PCL库简要说明
- PCL库中的PointCloud数据类型
- PCL库实时显示点云流
- ubuntu16.04 安装PCL库
- ICE 网络库尝试
- 尝试CameraCalibration库
- ICE 网络库尝试
- 尝试
- 尝试
- 尝试
- 尝试!
- 尝试
- 尝试
- 尝试
- 尝试
- js效果
- 深入了解HelloAndroid下的三个文件
- C++之测试snmp的注册模块
- linux ssh自动登陆
- 文件操作
- PCL库尝试
- 小猪的Android入门之路 day 1
- SGU 495 Kids and Prizes [期望]
- c# 模拟表单提交,post form 上传文件、大数据内容
- 小猪的Android入门之路 Day 2
- 七步教你实现Django网站列表自动分页
- left join 和 inner join 以及 fetch
- 带扩展名的路由失效问题
- Redis入门很简单之三【常见参数配置】


