支持向量机
来源:互联网 发布:吃鸡优化设置 编辑:程序博客网 时间:2024/05/22 01:53
支持向量机(SVM)一
- 支持向量机SVM
- 一最大间隔分类器
- 1 决策面
- 2 最优决策面
- 3 最小间隔
- 4 最小间隔最大化
- 5 拉格朗日对偶性
- 1原始问题
- 2对偶问题
- 3KKT条件
- 6 最小间隔最大化求解
- 求解内部极小化
- 求解外部极大化
- 7 SVMLDALogistics Regression 算法比较
- 对于Logistics Regression
- 对于Linear Discriminant Analysis
- 对于SVM
- 一最大间隔分类器
在看这篇文章之间,建议先看一下感知机,这样可以更好的看懂SVM。
一、最大间隔分类器
在之前的文章感知机中提到过,感知机模型对应于特征空间中将实例划分为正负两类的分离超平面,但是,感知机的解却不止一个。对同一个数据集而言,可以计算得到很多的感知机模型,不同的感知机的训练误差 都是一样的,都为0。
那么,这些训练误差都为0的感知机模型中,如何针对当前数据集,选择一个最好的感知机模型呢?现在就需要考虑模型的 泛化误差 了。即,在所有训练误差为0的感知机中,选择泛化误差最小的那个感知机,这就是SVM算法最初的目的。
基本的SVM(最大间隔分类器)是一种二分类模型,它是定义在特征空间上的间隔最大的线性分类器,间隔最大是SVM和感知机不同的地方,间隔最大化对应于泛化误差最小。
1.1 决策面
面对一个线性可分的二分类问题,将正负样本分开的超平面,称为决策面。
和 线性回归 模型一样,这里一般会使用一些特征函数
这里
这里输出的取值为
如果感觉
ϕ(x) 这种表述方式不太习惯,可以考虑所有的ϕ(x)=x ,这样就和一般的书上的公式一致了。这种表达仅仅是我个人的喜好,式主要是为了强调,在实际问题中,输入空间x 一般不会作为模型的输入,而是要将输入空间通过一定的特征转换算法ϕ(x) ,转换到特征空间,最后在特征空间中做算法学习。而且,在实际问题中,各种算法基本上都是死的,但是,特征变换的这个过程ϕ(x) 却是活的,很多时候,决定一个实际问题能不能很好的解决,ϕ(x) 起着决定性的作用。举个简单的例子,比如Logistics Regression,数据最好要做归一化,如果数据不归一化,那么那些方差特别大的特征就会成为主特征,影响模型的计算,ϕ(x) 就可以做这个事情。再或者后面要降到的核函数问题,核函数SVM能解决非线性可分问题,主要也是基于使用ϕ(x) 来做非线性特征变换。
作为一个决策面:
当样本的标号
当样本的标号
**究竟什么是决策面?
答:决策面就是能够将正负样本分开的点的集合,比如上面的模型中,决策面的数学表达式为:wTϕ(x)+b=0 ,决策面就是这个式子的解集,所以,一般我们就直接用这个式子代表决策面了。可以看到,对于这个决策面的数学表达式而言,w 和b 的数值并不重要。比如,wTϕ(x)+b=0 和2wTϕ(x)+2b=0 ,后一个决策面的参数数值是前一个决策面数值的两倍,但这两个决策面的解是一样的,也就是说其得到的点集是一样的,那么这两个表达式所表示的就是同一个决策面。所以,这里我要强调一点,对于一个线性决策面而言,重要的不是w 和b 的取值,重要的是w 和b 的比值,w 和b 的比值决定了一个决策面的点集,也就决定了一个决策面。**
1.2 最优决策面
对于线性可分的二分类问题而言,使用 感知机 算法,可以得到很多很多满足上述要求的决策面,比如下图中,就是可以将正负两类数据分开的两个决策面。 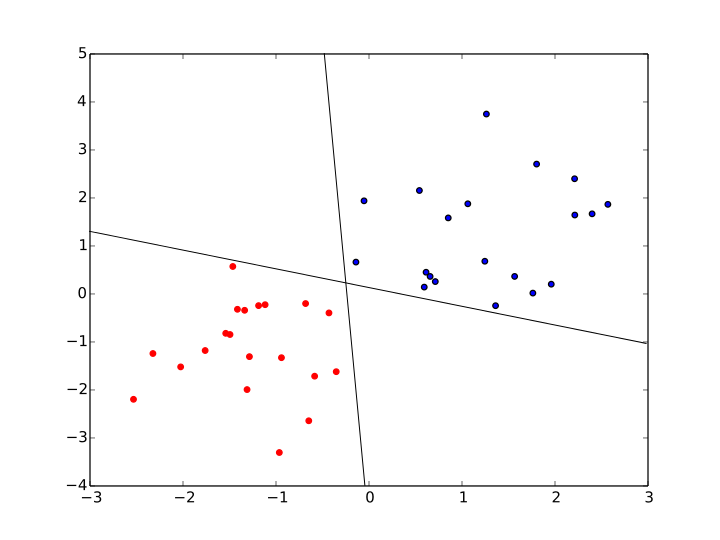
那么,在这些决策面中,哪个决策面,才是最优的决策面呢?首先,需要明确,上述的决策面,都是可以将训练样本正确分类的决策面,也就是说,上述决策面的 训练误差 都为0。要从这些训练误差都为0的模型中,选出一个最好的模型,很自然的,就需要考虑模型的 泛化误差 。
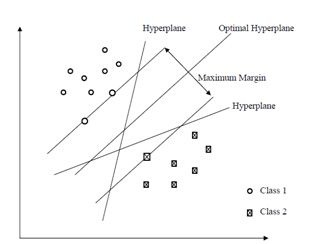
最大间隔分类器认为,决策面的泛化误差可以用训练样本集合中,离决策面最近的样本点到决策面的间隔(margin)来表示,离决策面最近的样本点,到决策面的间隔(margin)越大,那么,这个决策面的泛化误差就越小。直观的来讲,最优决策面差不多就是下面这幅图中,中间的那个决策面。
1.3 最小间隔
什么是间隔?
答:首先,要搞清楚是谁和谁的间隔,在这里指的是一个 训练样本点 和 决策面 之间的间隔。
那么,间隔又如何定义的呢?
答:间隔,就是样本点到决策面之间的距离,由中学的知识就可以知道,一个样本点
但这个距离在数值上会存在正负的问题,由于样本点类别取值
当
当
这样,分类正确的样本点的间隔就永远是正的了。
显然,一旦决策面有了,那么训练集合中的每个样本点
既然
1.4 最小间隔最大化
前面已经说了,要使用决策面在训练样本中的最小间隔
用优化理论的形式重写一下上面的式子,可以得到:
将上面的约束条件变一下型可得:
在前面已经提到过,对于一个决策面
所以,只要有一个决策面,那么,唯一确定的是
也就是说,
那么,上面的式子又可以改写为:
可以看到,上面的式子最大化的目标函数变成了
这里,最小间隔为:
在网上博客还有现有的书籍中,对于最小间隔最大化的解释,都使用了函数间隔和几何间隔的概念,我个人在第一次接触这两个概念的时候,就有些被弄糊涂了,理解了这两个概念之后,又感觉这种解释过于冗余、牵强,完全是为了解释最小间隔最大化而解释最小间隔最大化。所以,这里我直接抛弃函数间隔和几何间隔的概念,给出我个人的一种解释。
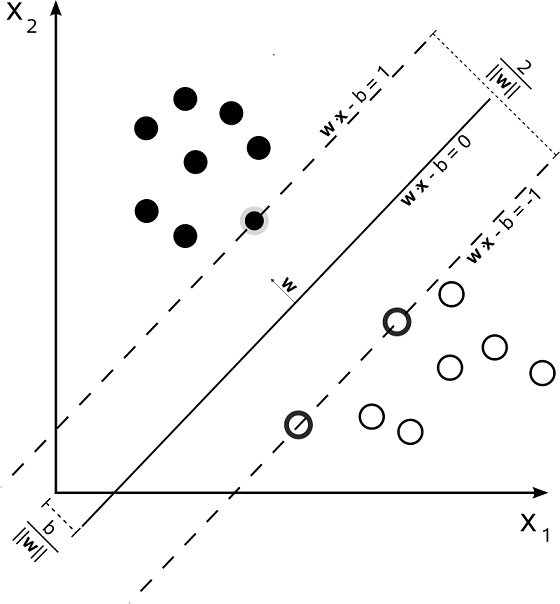
最小间隔最大化后得到的决策面,就是我们要找的泛化误差最小的决策面。对于下图中两特征的二分类问题而言,可以看出, 最小间隔为
由于间隔最小的样本点
所以,间隔最小的正样本点
间隔最小的负样本点
这里定义,拥有最小间隔的正负样本点为支持向量(support vector),也就是上图中
关于支持向量机的名字,这里可以稍微说一下,因为这个名字并不是特别的好理解。首先是支持(support),根据柯林斯词典,support的主要意思:the activity of providing for or maintaining by supplying with money or necessities,表示的是提供一些必须品的意思。vector指的就是样本点,这个问题不大。那么问题来了,为什么将间隔最小的那些样本点叫做support vector(或者可以直接说是support point)呢?答:从图中可以看出,对于决策面而言,要想唯一的确定这个决策面,就是要根据最小的间隔
r 来得到,也就是说,决策面仅仅和拥有最小间隔的那些样本点相关,和其他那些间隔大于最小间隔的样本点,是没有关系的。即:拥有最小间隔的那些样本点是决策面所必须的,而间隔大于最小间隔的样本点的有无,对决策面并不构成影响。所以将拥有最小间隔的那些样本点叫做support point, 也就是support vector。
1.5 拉格朗日对偶性
在求解约束最优化问题的过程中,我们常常会使用拉格朗日对偶性(Lagrange duality),把原始问题(primal problem)转换为对偶问题(dual problem)来求解,基于对偶问题的求解来得到原始问题的解。这个方法在统计学中经常使用,不仅仅本文的SVM算法用到了拉格朗日对偶性,后面要讲的最大熵模型也用到了拉格朗日对偶性。这里仅仅对拉格朗日对偶性做一个简述,我个人认为,主要知道其概念和结果即可,无需深究。拉格朗日对偶性的详细说明,可以参见Boyd的《Convex Optimization》,该书用一整个章节的篇幅来详细的论述了拉格朗日对偶性的问题。
对于一个线性规划问题,我们称之为原始问题,都有一个与之对应的线性规划问题我们称之为对偶问题。原始问题与对偶问题的解是对应的,得出一个问题的解,另一个问题的解也就得到了。并且原始问题与对偶问题在形式上存在很简单的对应关系:
- 目标函数对原始问题是极大化,对偶问题则是极小化
- 原始问题目标函数中的系数,是对偶问题约束不等式中的右端常数,而原始问题约束不等式中的右端常数,则是对偶问题中目标函数的系数
- 原始问题和对偶问题的约束不等式的符号方向相反
- 原始问题约束不等式系数矩阵转置后,即为对偶问题的约束不等式的系数矩阵
- 原始问题的约束方程数对应于对偶问题的变量数,而原始问题的变量数对应于对偶问题的约束方程数
- 对偶问题的对偶问题是原始问题
1、原始问题
假设,有
这里
上面这种约束优化问题的形式成为原始问题。
现在,引入拉格朗日函数:
这里
现在考虑最大化这个拉格朗日函数,定义:
对于上面的最大化式子有:
- 如果不等式约束
ci(x)<0 ,等式约束hj(x)=0 ,那么上式最大化就会使得αi=0 ,βj 可以取任意值。 此时所有满足约束条件的,并且最大化结果为θp(x)=f(x) 。 - 如果不等式约束
ci(x)=0 ,等式约束hj(x)=0 ,那么上式最大化就会使得αi>0 ,βj 可以取任意值。此时是满足约束条件的,并且最大化结果为θp(x)=f(x) 。 - 如果存在不等式约束
ci(x)>0 , 等式约束hj(x)=0 ,即此时存在不等式约束违反约束条件,那么要使得上式最大化,必然会使得αi=∞ ,进而使得θp(x)=∞ 。 - 如果不等式约束
ci(x)≤0 , 存在hj(x)≠0 ,那么要使得上式最大化,必然会使得βj=∞ ,进而使得θp(x)=∞ 。
综上所述,可以知道:
由于原始最优化问题就是要在满足约束条件下,求解最小化的
也就是说,原始约束最优化问题:
中的
于是乎,原始约束最优化问题就变成了一个极小极大化的问题:
很显然,这个极小极大化问题,和原始问题是等价的。
为了方便,这里定义原始问题(primal problem)的最优解为:
2、对偶问题
对于一块磁铁而言,磁铁有N极和S极,N极和S极只是同一块磁铁的不同表现而已,这两个极性虽然不同,但是却拥有相同的本质:磁。他们是相辅相成的,是同一个事物的两种不同表现。就像有阴必有阳;有光明必有黑暗;而阴阳本为一体,明暗实为一物,他们都是同一个东西的不同表现而已,这个是世间万物的规律。
对偶问题和原始问题也是一样,他们是优化问题的两个不同表现形式而已,他们本质上是一个东西,只是表现的方式相反罢了。
考虑原始问题:
原始问题是以
原始问题最终是被极小化,成为了一个极小极大化的问题:
对偶问题,要和其相反,就需要被极大化,而称为一个极大极小化的问题:
上面的式子,就称为拉个朗日函数的极大极小问题,并定义对偶问题(dual problem)的最优解为:
由于:
所以:
上面这是式子说明,
在我们常见的问题中,只要满足一定的条件,就可以使得
3、KKT条件
对于原始问题 和 对偶问题而言,
上述的KKT条件,看起来很吓人,其实很容易理解:函数
前面已经说明过,函数
而最后一个KKT条件,对应的就是
1.6 最小间隔最大化求解
求解最小间隔最大化,就是要求解式子:
而求解上面的式子,用的到方法,就是拉格朗日对偶性。这里,在原来的最小化的目标函数前面加了
将它作为原始的优化问题,应用拉格朗日对偶性,通过求解对偶问题(dual problem)来得到原始问题(primal problem)的最优解,这个最优解,就对应于最优的决策面。
这样做的优点主要有两个:
一、对偶问题相对来说比较容易求解
二、可以很自然的引入核函数,进而推广到非线性分类器中
首先,构建拉格朗日函数,由于上面的约束优化问题中只有不等式约束,所以为所有的不等式约束添加拉格朗日乘子:
根据前面关于拉格朗日对偶性的说明可以很容易知道,这个原始问题为极小极大问题:
其对应的对偶问题为极大极小问题:
求解内部极小化
这里首先求解内部的极小化问题:
显然,这个极小化问题是以
那么,就有:
将
上面推导的导数第二步使用了:
这里的
求解外部极大化
前面已经将内部的极小化求解得到了
这个就是原问题的对偶问题,当然了,可以将这个对偶问题的目标函数的符号换一下,让它成为一个最小化的问题:
公式推导到这个地方,就可以知道,上面这个最小化问题,就是我们最终要求解的问题,其最小化的目标函数是以
也就是说,假设最优解是
那么,在已知这个最优解的情况下,我们来看一下,基于这个最优解,SVM的决策面是什么样的?
根据原始问题
那么,就有:
这里,根据已经求得的
在前面讨论过,SVM是间隔最大化的决策面,支持向量对应的就是间隔最小的那些点,由前面关于间隔最大化的讨论可以知道,支持向量满足下面这个公式:
而根据前面对原始问题的讨论,可以知道,满足这个公式的点
同时,需要注意:
当然,为了稳妥起见,很多时候,我们会将所有的支持向量
这样,就可以求得最终的决策超平面为:
分类决策函数可以写为:
这里就可以发现:
- 在预测的时候,
w∗ 和b∗ 仅仅依赖于训练集合中α∗i>0 的那些样本点,而其他样本点对w∗ 和b∗ 没有影响。但是,为了求得w∗ 和b∗ ,在训练阶段,还是需要整个样本集合。也就是说,在做预测的时候,支持向量机需要的内存空间是非常小的,只需要存储支持向量即可,预测过程和非支持向量无关。 - 分类决策函数仅仅依赖于输入
x 和 训练样本之间的內积。这个內积是后面核函数的雏形,也是SVM得以广泛应用的关键。
1.7 SVM、LDA、Logistics Regression 算法比较
在之前的文章线性判别分析(Linear Discriminant Analysis)中就说过:凡是分类算法,必定有决策面,而这些分类算法所不同的是:决策面是线性的还是非线性的;以及如果得到这个决策面。
对于Logistics Regression
对于一个二分类问题,在Logistics Regression中,假设后验概率为Logistics 分布:
这里,使用一个单调的变换函数,logit 函数:
所以Logistics Regression的决策面就是:
对于Linear Discriminant Analysis
这里假设
LDA假设
这里,特征
LDA和前面提到的Logistics Regression采用的单调变换函数一样,都是logit 函数:
所以LDA的决策面就是:
显然,在LDA中,和Logistics Regression不同的是,LDA的决策面是由各个数据分布的方差和类别中心决定的。
对于SVM
对于SVM而言,我么假设,最大间隔会带来最小的泛化误差。但是,反过来思考,这个假设真的是真确的吗?在讨论LDA和Logistics Regression的时候,我们其实也是说他们的决策面是最优的。那么,到底那个算法得到的决策面才是最好的呢?
说到这个问题,让我突然想起来前段时间的一件事情,一同学面试,面试官问他:Logistics Regression对数据分布有什么要求?他并不知道怎么回答,后来回来和他们实验室的人讨论了许久,也没有结果。其实这个回答非常的简单:
我们所面对的所有的机器学算法,都是有适用范围的,或者说,我们所有的机器学习算法都是有约束的优化问题。而这些约束,就是我们在推导算法之前所做的假设。
比如:Logistics Regression,上面已经明确说明了,在Logistics Regression中,假设后验概率为Logistics 分布;再比如:LDA假设
而对于SVM而言,它并没有对原始数据的分布做任何的假设,这就是SVM和LDA、Logistics Regression区别最大的地方。这表明SVM模型对数据分布的要求低,那么其适用性自然就会更广一些。如果我们事先对数据的分布没有任何的先验信息,即,不知道是什么分布,那么SVM无疑是比较好的选择。
但是,如果我们已经知道数据满足或者近似满足高斯分布,那么选择LDA得到的结果就会更准确。如果我们已经知道数据满足或者近似满足Logistics 分布,那么选择Logistics Regression就会有更好的效果。
通过这三个方法的比较,我只想说明一件事情:机器学习算法是死的,但,人是活的。使用什么机器学习算法,是根据实际问题要求,和数据的具体分布而定的。
支持向量机(SVM)二
- 支持向量机SVM
- 二软间隔最大化分类器
- 1 软间隔最大化分类器的两个问题
- 哪些是分类错误的样本点
- 分类错误的样本点的处理软间隔变量
- 2 软间隔最大化分类器 的优化公式
- 3 软间隔最大化分类器 的对偶问题
- 4 软间隔最大化分类器 求解
- 5 对参数 alphaxi 的讨论
二、软间隔最大化分类器
在这篇文章之前所有的讨论中,假设,所面对的数据在特征空间
ϕ(x) 中是线性可分的,那么,最终得到的SVM可以在输入空间X 中得到一个准确的判别面,尽管其对应的判别面可能是一个非线性判别面。然而,在现实的数据中,数据是线性不可分的(或者近似线性可分)。换一种说法就是:类条件分布存在重叠。如果这样,上面讲的算法最终只会有两种结果:1、决策面会出现严重的震荡,而无法收敛;2、即便收敛到了一个非线性的决策面,其决策面也会十分的复杂,泛化能力低。
因此,我们就需要对原始的SVM算法做一定的改动,让它对数据的要求,从线性可分扩展到线性不可分。即:允许部分训练数据存在分类错误的情况,以得到一个相对比较好的决策面。 这个改动后的SVM一般被称为软间隔最大化分类器 ,而与之相对应的,前面论述的只可以解决线性可分数据的SVM,称为 硬间隔最大化分类器 。
2.1 软间隔最大化分类器的两个问题
那么,现在就有两个问题摆在我们面前:
1.在SVM中,对于非线性可分的数据而言,哪些样本点是存在分类错误的样本点?
2.对于分类错误的点,软间隔最大化分类器 如何处理以得到相对比较好的决策面?两个问题,就是软间隔最大化分类器的核心问题,回答了这两个问题,掌握了软间隔最大化分类器。
哪些是分类错误的样本点
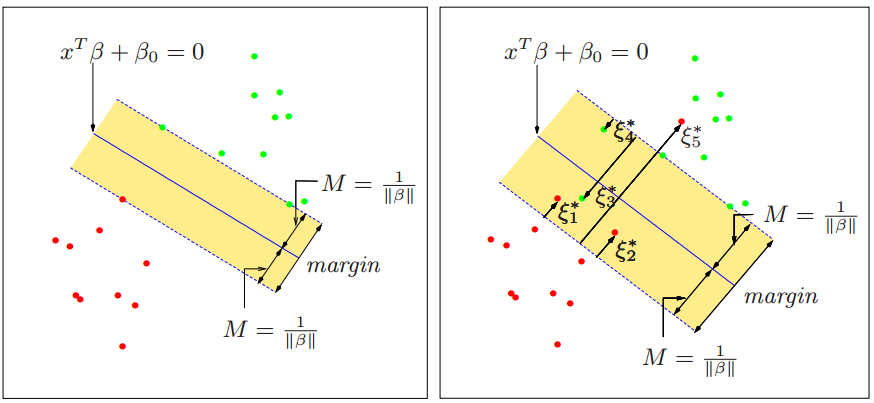
首先必须要知道,面对一个非线性可分的数据集,哪些样本点是分类错误的样本点?可以先看下面这幅图:
图中,左边那幅图对应的是数据线性可分时,SVM的状态。此时有决策面:
xTβ+β0=0 ,也就是之前讨论的xTw+b=0 ,只是写法不同而已。根据前面“最小间隔最大化”小章节的讨论可知:最小间隔为M=1/||β|| ,也就是之前的表达式:r=1/||w|| 。这种状态,是所有数据点都分类正确,且最小间隔最大分类的状态。图中,右边那幅图对应的就是数据线性不可分时,SVM的状态。此时决策面依然是:
xTβ+β0=0 ,最小间隔仍然为M=1/||β|| 。不过,右图中ξ∗i;i=1,2...5 就是非线性可分数据在SVM中分类错误的点。那么总结一下,在非线性可分的情况下,样本点的状态一共有下面五种:
1.非支持向量,即是在margin 两侧,被正确分类的样本点。这些样本点对于SVM的决策面没有贡献。
2.在margin 边界上面的点,这个是支持向量,且被正确分类。
3.在margin 内部,被正确分类的点,比如ξ∗1,ξ∗2,ξ∗4 ,这些也是支持向量。
4.在决策面上的点,这些点可以拒绝判断,也可以直接认为是分类正确的点。
5.真正的被分类错误的点:ξ∗3,ξ∗5 ,这些点直接走到了决策面的另一边去了。很容易发现,相对于数据线性可分的情况而言,非线性可分数据的状态多了三种情况,也就是上面五种情况的后三种,线性可分的数据只存在前面两种情况。
而后面三种情况的样本点的间隔,都比最小间隔
r 也就是图中的M 要小一些,所以,后面这三种情况,就是SVM认为的错误的样本点(即便情况3、情况4样本被分类正确了),软间隔最大化分类器 就是要针对后面这三种情况来做文章。分类错误的样本点的处理:软间隔变量
前面提到了,后面三种情况的样本点的间隔,都比最小间隔
r 也就是图中的M 要小一些。这里首先要考虑的问题就是,如何用公式来表达后面这三种情况?这里就引入了一个最小间隔r 的比例因子:软间隔变量ξ 。ξ 是最小间隔r 的比例系数,或者叫做倍数。下面先分别讨论如何将软间隔变量ξ 应用到上面的后三种情况中:
对于前面第三种情况:在
margin 内部,被正确分类的点,比如ξ∗1,ξ∗2,ξ∗4 。这些点的间隔为:ξ∗i=ξi∗r; 0<ξi<1 对于前面第四种情况:在决策面上的点,这些点的间隔为:
ξ∗i=ξi∗r; ξi=1 对于前面第五种情况:真正的被分类错误的点:
ξ∗3,ξ∗5 ,这些直接走到了决策面的另一边去了的点,这些点的间隔为:ξ∗i=ξi∗r; ξi>1 为了将前面的第一种情况:非支持向量,即是在
margin 两侧,被正确分类的样本点。和第二种情况:在margin 边界上面的点,这个是支持向量,且被正确分类。也统一的用软间隔变量ξ 来表示,这里将SVM的优化公式重写为下面这个形式:maxw,brst:ti{wTϕ(xi)+b}||w||≥r(1−ξi); i=1,2,...Nξi≥0;i=1,2,...N 而前面第一种情况和第二种情况所对应的
ξi=0 。和“最小间隔最大化”章节中讨论的一样,
w 和b 的 比值 不变的情况下,w 是可以任意取值的。这样的话,为了便于计算,我们就取:||w||=1r 那么,上面的式子又可以改写为:
maxw,b1||w||st:ti{wTϕ(xi)+b}≥1−ξi;i=1,2,...Nξi≥0;i=1,2,...N 可以看到,上面的式子是最大化
1/||w|| ,很容易知道,其等价于 最小化||w||2 ,那么最小间隔最大化,最终就可以变为下面这个式子:minw,b||w||2st:ti{wTϕ(xi)+b}≥1−ξi;i=1,2,...Nξi≥0;i=1,2,...N 这里,最小间隔为:
r=1||w|| 2.2 软间隔最大化分类器 的优化公式
上面提到的第五种情况,真正的被分类错误的点:
ξ∗3,ξ∗5 ,这些直接走到了决策面的另一边去了的点,所对应的ξi>1 。如果说我们知道∑Ni=1ξi≤K ,那么,就可以说,这个 软间隔最大化分类器 的训练错误样本数,最多为K 个。让训练误差尽量的小也是我们的一个优化目标,这样,软间隔最大化分类器 就成了一个多目标的优化问题:minw,b12||w||2minξ∑i=1Nξist:ti{wTϕ(xi)+b}≥1−ξi;i=1,2,...Nξi≥0;i=1,2,...N 由于上面两个优化目标的限制条件是一样的,可以将两个优化目标合成一个优化目标:
minw,b,ξ{12||w||2+C∑i=1Nξi}st:ti{wTϕ(xi)+b}≥1−ξi;i=1,2,...Nξi≥0;i=1,2,...N 这里的参数
C 是损失参数(cost parameter),用于权衡||w||2 和∑Ni=1ξi 。一般我们将||w||2 视为模型的复杂度,而将∑Ni=1ξi 视为模型的错误率,损失参数C 就是在模型复杂度和模型的错误率之间找一个平衡,这个值一般作为模型的一个输入变量,需要人工设置:
- C 越小,模型越偏向于最小化
||w||2 ,而忽略∑Ni=1ξi ,这样模型非常简单,但模型的错误率相对较高。- C 越大,模型越偏向于最小化
∑Ni=1ξi ,而忽略||w||2 ,这样模型的错误率相对较低,但模型相对较为复杂。需要强调:
ξi 是对于SVM而言,分类错误的样本点xi 的分类错误间隔相对于最小间隔r 的比例。我们不可能让错误的比例无限的增长,那样分类错误就太大了。所以,我们需要对错误间隔进行限制,而限制的手段,就是为总的错误间隔比例加一上限:∑ξi≤constant 。这是软间隔最大化分类器 优化公式的另一种解释。2.3 软间隔最大化分类器 的对偶问题
这里的步骤和 1.5 拉格朗日对偶性 几乎雷同,首先将 软间隔最大化分类器 的优化公式转换为拉个朗日函数的形式,其原始的优化公式为:
minw,b,ξ{12||w||2+C∑i=1Nξi}st:ti{wTϕ(xi)+b}≥1−ξi;i=1,2,...Nξi≥0;i=1,2,...N 拉个朗日函数为:
L(w,b,ξ,α,μ)=12||w||2+C∑i=1Nξi优化目标−∑i=1Nαi{ti{wTϕ(xi)+b}−1+ξi}−∑i=1Nμiξn不等式约束 其中,
αi,μi 为拉格朗日乘子。将L(w,b,ξ,α,μ) 分别对w,b,ξ 求偏导:∇wL(w,b,ξ,α,μ)∇bL(w,b,ξ,α,μ)∇ξiL(w,b,ξ,α,μ)=w−∑i=1Nαitiϕ(xi)=0=∑i=1Nαiti=0=C−αi−βi=0;i=1,2,..N 就可以得到:
w=∑i=1Nαitiϕ(xi)∑i=1Nαiti=0C−αi−βi=0;i=1,2..N 将上面三个式子带入到
L(w,b,ξ,α,μ) 中,和之前 1.6 最小间隔最大化求解 中的推导一样,最终可以得到:minw,b,ξL(w,b,ξ,α,μ)=−12∑i=1N∑j=1N{αiαjtitj<ϕ(xi),ϕ(xj)>}+∑i=iNαi 这里的
<ϕ(xi),ϕ(xj)> 是ϕ(xi) 和ϕ(xj) 的內积。再对
minw,b,ξL(w,b,ξ,α,μ) 求极大化,即可得到软间隔最大化分类器 的对偶问题:maxα{−12∑i=1N∑j=1N{αiαjtitj<ϕ(xi),ϕ(xj)>}+∑i=iNαi} s.t. ∑i=1NαitiC−αi−μiαiμi=0=0≥0≥0;i=1,2,...N 这个就是原问题的对偶问题,当然了,可以将这个对偶问题的目标函数的符号换一下,,让它成为一个最小化的问题,并将后面三个式子做一个合并:
minα{12∑i=1N∑j=1N{αiαjtitj<ϕ(xi),ϕ(xj)>}−∑i=iNαi} s.t. ∑i=1Nαiti0≤αi=0≤C;i=1,2,...N 这就是 软间隔最大化分类器 的对偶问题,和前面相比,这里的对偶问题只是限制条件
0≤αi≤C 和前面不同,其他的是一模一样的。2.4 软间隔最大化分类器 求解
很显然,得到了软间隔最大化分类器 的对偶形式之后,其优化求解出来的就是最优解
α∗ 。这里再次说明:假设α∗ 我们已经通过某种算法得到了,至于这个算法是什么后面的章节会详细的说明,这里不同担心。仿照 1.5 拉格朗日对偶性 中的公式推导 ,假设
x∗,α∗,ξ∗,α∗,μ∗ 为最优解,可以很容易推出 软间隔最大化分类器 拉格朗日优化的KKT条件为:∇wL(x∗,α∗,ξ∗,α∗,μ∗)∇bL(x∗,α∗,ξ∗,α∗,μ∗)∇ξL(x∗,α∗,ξ∗,α∗,μ∗)α∗i(ti{w∗Tϕ(xi)+b∗}−1+ξ∗i)ti{w∗Tϕ(xi)+b∗}−1+ξ∗iα∗iμ∗iξ∗iξ∗iμ∗i=w∗−∑i=1Nα∗itiϕ(xi)=0=∑i=1Nα∗iti=0=C−αi−μi=0=0;i=1,2,...N≥0;i=1,2,...N≥0;i=1,2,...N=0;i=1,2,...N≥0;i=1,2,...N≥0;i=1,2,...N 在假设知道
α∗ 的情况下,由KKT条件的第一个公式:∇wL(x∗,α∗,ξ∗,α∗,μ∗)=w∗−∑Ni=1α∗itiϕ(xi)=0 可以知道,w 的最优解为:w∗=∑i=1Nα∗itiϕ(xi) 再找到一个
0<αj<C ,其所对应的样本点满足:ti{w∗Tϕ(xi)+b∗}−1=0 ,那么,就可以和前面的推导一样,得到:b∗=1ti−w∗Tϕ(xi) 同时,需要注意:
t2i=1 ,并带入w∗T ,就可以将上面这个式子重写为:b∗=ti−∑j=1Nα∗jtj<ϕ(xj),ϕ(xi)> 当然,为了稳妥起见,很多时候,我们会将所有的支持向量
xi∈S 对应的b∗i 都求出来,然后用其均值,作为最终的b∗ 。这里S 是支持向量的集合,也就是α∗i>0 所对应的点集:b∗=1Ns∑i=1Nsb∗i 这样,就可以求得最终的决策超平面为:
∑i=1N{α∗iti<ϕ(xi),ϕ(x)>}+b∗=0 分类决策函数可以写为:
f(x)=sign{∑i=1N{α∗iti<ϕ(xi),ϕ(x)>}+b∗} 2.5 对参数
α,ξ 的讨论基于上面的推导,可以很容易的看出,软间隔最大化分类器 就是在 硬间隔最大化分类器 的基础上,处理非线性可分的数据。而参数
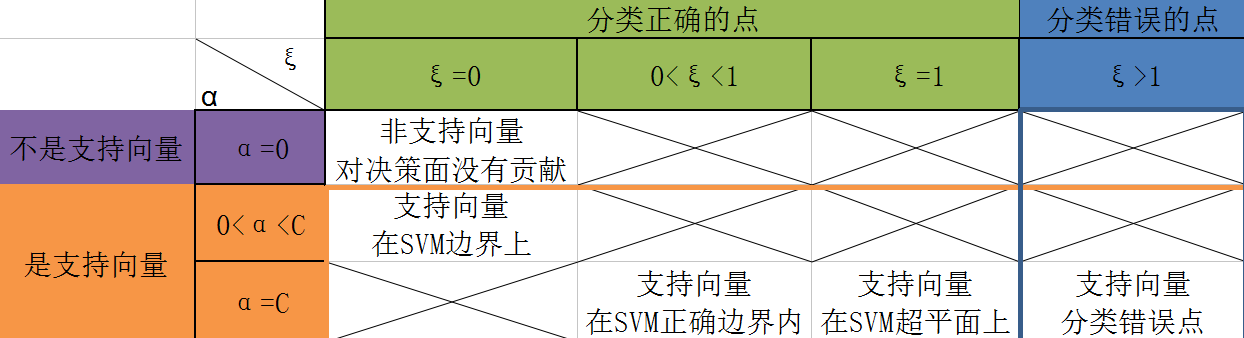
α,ξ 起着决定样本点类别的作用,那么,这里就对这两个参数做一下讨论,看看这两个参数是如何判断非线性可分数据集中的样本点的类别的。为了方便,这里直接用一张表格说明参数
α,ξ 和样本点之间的关系,图种叉叉的部分,说明这种情况并不存在,下面将对这个表格做详细的说明:
在 2.1 软间隔最大化分类器的两个问题 中,就讨论过,非线性可分情况下,SVM中的样本点一共有五种情况,也就是上面表格中的所对应的五种情况。
从表格中可以粗略的观察到:
- 当αi=0 时,对应的样本点是非支持向量;当αi>0 时,对应的样本点是支持向量
- 当ξ≤1 时,对应的样本点可以被正确的分类;当ξ>1 时,对应的样本点分类错误现在基于参数
α、ξ 对上面五种情况再做更详细的讨论:1.当
ξi=0,αi=0 时,此时的样本点xi 并不是支持向量,其被完全的分类正确,样本点满足:ti{wTϕ(xi)+b}>1 。
变量关系:当αi=0 时,由KKT条件中的第三条:C−αi−μi=0 可以知道,μi=C ;再由KKT条件第七条:μ∗iξ∗i=0 可以知道:ξi=0 ;最后根据KKT条件的第四条和第五条,可以很容易知道:ti{wTϕ(xi)+b}>1 。2.当
ξi=0,0<αi<C 时,此时样本点刚好在SVM的间隔边界上,是支持向量,被正确分类,样本点满足:ti{wTϕ(xi)+b}=1 。
变量关系:当0<αi<C 时,由KKT条件中的第三条:C−αi−μi=0 可以知道,0<μi<C ;再由KKT条件第七条:μ∗iξ∗i=0 ,可以知道:ξi=0 。最后根据KKT条件的第四条和第五条,可以很容易知道:ti{wTϕ(xi)+b}=1 。3.当
0<ξi<1,αi=C 时,此时样本点在SVM的正确的间隔边界内,是支持向量,被正确分类,样本点满足:0<ti{wTϕ(xi)+b}<1 。
变量关系:当αi=C 时,由KKT条件中的第三条:C−αi−μi=0 可以知道,μi=0 ;再由KKT条件第六、七条:ξ∗i≥0;μ∗iξ∗i=0 ,可以知道:ξi>0 。根据KKT条件的第四条和第五条,可以很容易知道:ti{wTϕ(xi)+b}=1−ξi 。那么,此时0<ξi<1 ,所以0<ti{wTϕ(xi)+b}<1 ,即,其对应的样本点在分类正确的间隔中。4.当
ξi=1,αi=C 时,此时样本点在SVM决策面上,是支持向量,被正确分类,样本点满足:ti{wTϕ(xi)+b}=0 。
变量关系:这里的变量关系的分析和第三种情况一样,差别仅仅是ξi=1 ,由:ti{wTϕ(xi)+b}=1−ξi ,可以很容易知道:ti{wTϕ(xi)+b}=0 ,这样,样本点xi 就刚好在SVM的决策面上了。5.当
ξi>1,αi=C 时,是支持向量,被错误分类,样本点满足:ti{wTϕ(xi)+b}<0 。
变量关系:这里的变量关系的分析和第三种情况一样,差别仅仅是ξi>1 ,由:ti{wTϕ(xi)+b}=1−ξi ,可以很容易知道:ti{wTϕ(xi)+b}<0 ,这样,样本点xi 就在决策面错误的一边,被错误分类了。由于变量
α 是我们最终要求解的变量,这里再单独对变量α 做一个总结。首先,这里取g(x) 如下,即SVM的决策面函数:g(x)=∑i=1N{αiti<ϕ(xi),ϕ(x)>}+b 那么,根据前面的表格,可以很容易得到:
αi=00<αi<Cαi=C⇔tig(xi)≥1⇔tig(xi)=1⇔tig(xi)≤1 总的来说就是:
- 在SVM间隔区间外的点,对应的
αi=0 - 在SVM间隔区间边缘上的点,对应的
0<αi<C - 在SVM间隔区间内部的点,对应的
αi=C 支持向量机(SVM)三
标签: svm2016-07-31 16:55 834人阅读 评论(0)收藏举报分类:
版权声明:本文为博主原创文章,未经博主允许不得转载。
目录(?)[+]
支持向量机(SVM)
标签(空格分隔): 监督学习
@author : duanxxnj@163.com
@time : 2016-07-31
- 支持向量机SVM
- 三基于核函数的非线性SVM
- 1 特征映射解决非线性可分问题
- 2 核函数Kx_1x_2
- 3 非线性映射定phix与核函数Kx_1x_2的关系
- 4 常用的核函数
- 5 对无穷维度的定性理解
三、基于核函数的非线性SVM
使用上面提到的 软间隔最大化分类器 在一定程度上,可以解决非线性可分问题。但是,其实质上是用一个线性的决策面,在允许部分训练样本点出现分类错误的前提下,得到的SVM。软间隔最大化分类器 对于数据是近似线性可分的情况,效果还是不错的,但是对于完全的线性不可分的情况,其分类效果就不太好了。此时,就需要通过某种手段,将SVM从线性分类器扩展成为非线性分类器,而这个手段,就是“核技巧”。
核技巧在机器学习中的应用是非常的广泛的,特别是从2000年之后,各个大牛们对核技巧的研究也越来越深入,这里仅仅对核技巧做一些简单的说明,方便在SVM中使用,后面会使用专门的文章来详细讨论核技巧。
在前面对SVM的推导中,最后得到的判别函数为:
f(x)=sign{∑i=1N{α∗iti<ϕ(xi),ϕ(x)>}+b∗} 上式中有两个东西需要格外注意,
ϕ(xi) 和<\phi(x_i),\phi(x)>
ϕ(xi) 所代表的就是一种空间映射,是核技巧必备的一个元素,这也是为什么本文从一开始推导SVM的公式的时候,使用的就是ϕ(x) 而不是单纯的x 的原因。
<ϕ(xi),ϕ(x)> 指的是ϕ(xi),ϕ(x) 的內积。这里可以看到,SVM的判别函数最终变成了ϕ(xi),ϕ(x) 的內积的求解。实际上,这两点,就是核技巧的核心,下面分别对这两点进行说明:
3.1 特征映射解决非线性可分问题
一般来说,如果能用一个超曲面将正负训练样本完全分开,则称这种问题为非线性可分问题。
非线性可分问题一般是非常的难求的,对于近似线性可分的非线性可分问题,还可以考虑使用上面的 软间隔最大化的SVM来得到一个分类器,但是如果数据非线性十分的强,以至于无法近似线性分开的时候,我们一般就考虑对数据空间做一个空间变换,将维度提升,在低维空间中非线性可分的问题,在高维空间中可能变成线性可分的问题,在高维空间中训练一个线性分类器,对数据进行分类。
注意:维度提升后,在高维空间,是可能变成线性可分!!!是可能!!!,说白了,数据从低维空间映射到高维空间之后,到底会成什么状态,没人说得准。虽然从低维到高维之后,数据是否线性可分,存在不确定性,但也不失为一种有效的手段,并且,其在实际的应用中表现的也还不错。这个就像深度学习算法一样,那货到底干了什么事情,没人说得准,反正最终效果还不错。
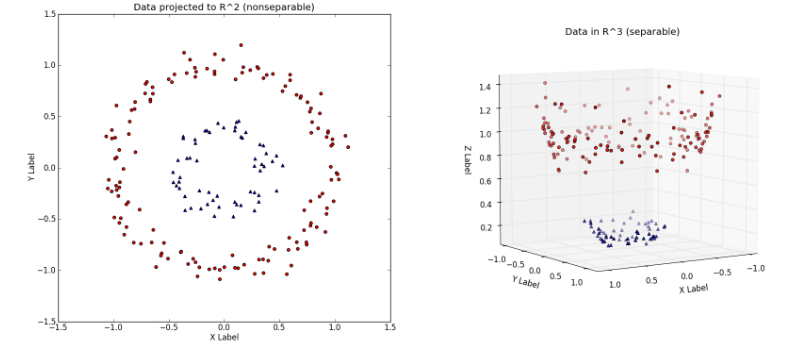
提升维度的过程大致可以从下面这个例子中看出来:
左图中对应的就是原始数据,显然左图中的数据是线性不可分的。然后通过映射:
[x1,x2]=>[x1,x2,x21+x22] 将数据从原始特征空间映射到新的特征空间。即,原始特征空间
X 是二维的,X 中的样本点可以用[x1,x2] 来表示,新的特征空间Z 是三维的,Z 中的样本点可以用[z1,z2,z3] 来表示。这样,上面的映射过程,就可以表示为:z1=x1z2=x2z3=x21+x22
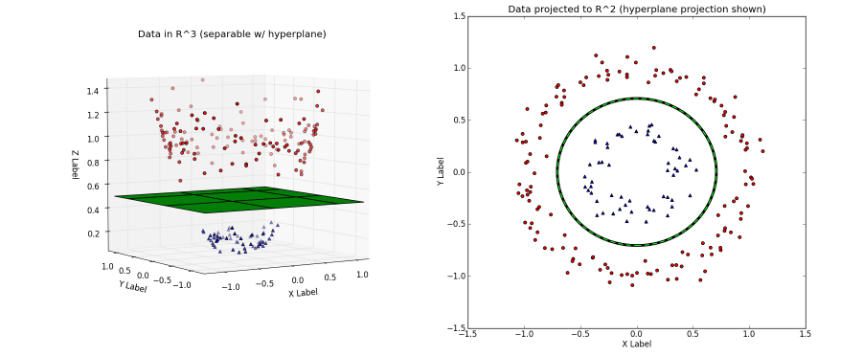
左图对应的是新的空间中,用一个平面就将变换后的数据分开;右图则对应原始空间中需要一个分线性的决策面,才可以将数据分开。
可以很容易的看出,在新的特征空间
Z 中,数据已经是线性可分的了。这就是提升数据维度,使得原空间的分线性可分问题变成新空间的线性可分问题的过程。上面的例子说明,用线性模型求解非线性分类问题分为两个步骤:1、首先使用一个变换,将原空间的数据
X 映射到更高维度的新空间Z ;2、在新的数据空间Z 中,用线性分类学习方法,从训练数据中学习模型。3.2 核函数
K(x1,x2) 前面也提到过,在前面对SVM的推导中,最后得到的判别函数为:
f(x)=sign{∑i=1N{α∗iti<ϕ(xi),ϕ(x)>}+b∗} 从公式中可以明显看出,对这个判别函数的求解最终变成了对
<ϕ(xi),ϕ(x)> 的计算。这里的ϕ(x) 就是上面提到的特征变换,用于解决非线性可分的问题。按照一般的思维方式,要求解
<ϕ(xi),ϕ(x)> ,那么,就需要我们先定义ϕ(x) ,再根据xi,x ,分别计算出ϕ(xi),ϕ(x) ,最后计算出它们的內积。这是一个非常繁琐的步骤,而且,由于对高维空间具体的数据分布知之甚少,我们并不能确定一个映射
ϕ(x) 是否一定能够使得原始数据在高维空间中线性可分,所以一般也很难确具体的映射公式定ϕ(x) ;或者说,我们一般很难显式的定义出ϕ(x) 。既然如此,是否可以将
<ϕ(xi),ϕ(x)> 直接看成一个函数,不显式的定义ϕ(x) ,而是给定了xi,x 后,就直接将<ϕ(xi),ϕ(x)> 计算出来的方法呢?有!这就是核函数!!!!核函数的定义:假设,将原始的输入空间为
X (可能是欧式空间Rn 或者是一个离散集合),新的特征空间为Z (希尔伯特空间),如果存在一个从X 到Z 的映射:ϕ(x):X→Z 使得对所有的
x1,x2∈X ,函数K(x1,x2) 满足条件:K(x1,x2)=<ϕ(x1),ϕ(x2)> 则称
K(x1,x2) 为一个核函数。其中ϕ(x) 为映射函数,<ϕ(x1),ϕ(x2)> 为ϕ(x1),ϕ(x2) 的內积。基于前面的讨论,可以得出结论:核技巧的想法就是,在学习与预测中,仅仅定义核函数
K(x1,x2) ,而不显式的定义映射函数ϕ(x) 。一般来说,直接计算
K(x1,x2) 相对比较容易,而通过<\phi(x_1),\phi(x_2)>的计算反而比较的复杂。映射函数
ϕ(x) 一般是将原始空间的维度升高,有时候会变成无穷维度。3.3 非线性映射定
ϕ(x) 与核函数K(x1,x2) 的关系
- 对于给定的函数
K(x1,x2) ,其映射后的空间Z ,可以使多样的,即可以映射到不同的特征空间中- 对于给定的函数
K(x1,x2) ,即便映射到相同维度的特征空间,其映射函数ϕ(x) 也存在多样性为了说明上面这两个特点,这里举个例子:假设,输入空间是
X=R2 ,核函数是K(x1,x2)=(x1∗x2)2
1. 取特征空间Z=R3 ,即维度升高一个维度,此时ϕ(x) 可以取:ϕ(x)=[(x(1))2,2√x(1)x(2),(x(2))2]T 或者也可以取:
ϕ(x)=12√[(x(1))2−(x(2))2,2x(1)x(1),(x(1))2+(x(2))2]T
- 取特征空间
Z=R4 ,即维度升高两个维度,此时ϕ(x) 可以取:ϕ(x)=[(x(1))2,x(1)x(2),x(1)x(2),(x(2))2]T 3.4 常用的核函数
此处本应该讲讲,如何来构造核函数的,但是这个知识点实在是太过复杂,直接放在后面专门讲核技巧的文章中。
一个函数是否能称为核函数,是有非常严格的要求的,但是,我们在实际的使用中,一般都会使用一些常用的核函数,这里提供四个最常用的核函数,关于这些常用核函数的说明,也将放在后面专门讲核函数的文章中。
1.Polynomial 核函数:
K(x,z)=(x,z)d;d∈N 2.Gaussian 核函数:
K(x,z)=exp(−||x−z||22σ2);σ>0 3.Sigmoid 核函数:
K(x,z)=tanh(α<x,z>+β);α>0,β>0 4.RBF 核函数:
k(x,z)=exp(−ρd(x,z));ρ>0,d(x,z)是任意的距离度量 3.5 对无穷维度的定性理解
每次在读一些关于核函数的书籍或者网上的博客的时候,总是会提到:核函数不需要显示的定义特征空间
Z 以及特征映射ϕ(x) ,使得学习算法隐式的在高维的特征空间中进行,甚至可以在无穷维度中进行。这句话的前部分,已经说明过了,核函数的确不需要显示的定义特征空间
Z 以及特征映射ϕ(x) ,就是可以完成学习过程。但是,甚至可以在无穷维度中进行到底是怎么回事?我所看到的书籍和网络博客中,却没有进一步的讨论。我在这里做一个简略的说明,这需要会涉及一些核函数构造的知识,比较复杂,这里仅仅做定性的分析,详细的讨论也会放在后面专门讲解核技巧的文章中。在高等数学中,有无穷级数的概念,举个简单的例子:
exp(x)=∑n=0∞xnn!;−∞<x<∞ 根据上面这个无穷级数的式子,可以很容易的推断出,指数型的核函数,可以变成无穷维度的多项式映射的结果:
k(x,z)=exp(k1(x,z))=∑m=0∞(k1(x,z))mm! 对于Gaussian 核函数:
K(x,z)=exp(−||x−z||22σ2);σ>0 由于这是一个指数型的核函数,根据前面的讨论,可以定性的判断出,基于无穷级数,Gaussian 核函数的映射函数,可以是无穷维度的。其具体的公式会在后面专门讲核函数的文章中说明,这里仅仅是一个定性的理解。
下面,以一分代码来说明一下SVM的应用:
# -*- coding: utf-8 -*-
"""
@author: duanxxnj@163.com
@time: 2015-07-17_13-59
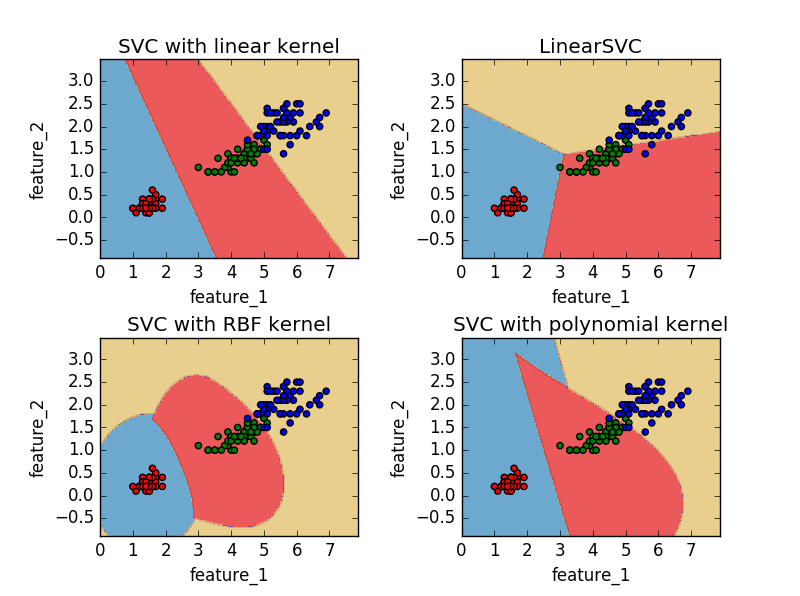
SVM分类算法示例
为了绘图方便,这里仅仅使用iris数据集的前两个特征作为样本特征
LinearSVC 使用的是平方合页损失
SVC(kernel=‘linear’) 使用的是正则化合页损失
LinearSVC 使用留一法(one-vs-rest)处理多类问题
SVC 使用的是one-vs-one的方法处理多类问题
从图中很容易看出one-vs-rest方法和one-vs-one所产生的决策面的区别
"""
print __doc__
import numpy as np
import matplotlib.pyplot as plt
from sklearn import svm, datasets
# 导入iris数据
# 这个数中一共有三个类别
# 每个类别50个样本
# 每个样本有四个特征
iris = datasets.load_iris()
X = iris.data[:, [2, 3]] # 这里仅仅两个特征作为样本特征
y = iris.target
C = 1.0 # SVM正则化参数
# 使用线性核学习SVM分类器
svc = svm.SVC(kernel='linear', C=C).fit(X, y)
# 直接使用线性SVM分类器
linear_SVC = svm.LinearSVC(C=C).fit(X, y)
# 使用rbf(径向基)核学习SVM分类器
rbf_svc = svm.SVC(kernel='rbf', gamma=0.7, C=C).fit(X, y)
# 使用多项式核学习SVM分类器
poly_svc = svm.SVC(kernel='poly', degree=3, C=C).fit(X, y)
# 生成绘图用的网格
x0_min, x0_max = X[:, 0].min() - 1, X[:, 0].max() + 1
x1_min, x1_max = X[:, 1].min() - 1, X[:, 1].max() + 1
xx0, xx1 = np.meshgrid(np.arange(x0_min, x0_max, 0.02),
np.arange(x1_min, x1_max, 0.02))
titles = ['SVC with linear kernel',
'LinearSVC',
'SVC with RBF kernel',
'SVC with polynomial kernel']
color = ['r']*50 + ['g']*50 + ['b']*50
for i, clf in enumerate((svc, linear_SVC, rbf_svc, poly_svc)):
plt.subplot(2, 2, i + 1)
plt.subplots_adjust(wspace=0.4, hspace=0.4)
z = clf.predict(np.c_[xx0.ravel(), xx1.ravel()])
z = z.reshape(xx0.shape)
plt.contourf(xx0, xx1, z, cmap=plt.cm.Paired, alpha=0.8)
plt.scatter(X[:, 0], X[:, 1], c=color)
plt.xlabel('feature_1')
plt.ylabel('feature_2')
plt.xlim(xx0.min(), xx0.max())
plt.ylim(xx1.min(), xx1.max())
plt.title(titles[i])
plt.show()
其实,关于SVM算法,如果是入门,看到这个地方,就已经不用再往下深究了。后面是SMO算法的推导,如果不清楚,并不影响SVM的理解。
- 人工智能-支持向量机
- 支持向量机
- 支持向量机导论
- 支持向量机分类
- 支持向量机SVM
- 支持向量机: Kernel
- 支持向量机简介
- [转]支持向量机
- 支持向量机简介
- 支持向量机
- 支持向量机基本原理
- 支持向量机
- SVM支持向量机
- 支持向量机
- 支持向量机简介
- 支持向量机
- 支持向量机:Duality
- 支持向量机笔记
- 小影
- max(X,Y),min(X,Y)的期望求解
- Android动画
- HDFS ZKFC自动切换原理分析
- 【C语言】运算符号详细说明
- 支持向量机
- git pull时报错fatal: Could not read from remote repository.
- 最短路-弗洛伊德算法
- Python字典转Json并使用多种格式实现
- 神经网络:Network In Network
- |洛谷|动态规划|P1130 红牌
- 第十一周项目
- java Date简单的 获得时分秒代码
- zookeeper系列学习——(1)zookeeper的简单介绍


