张高兴的 Windows 10 IoT 开发笔记:HC-SR04 超声波测距模块
来源:互联网 发布:初级程序员教程 编辑:程序博客网 时间:2024/05/23 18:56
HC-SR04 采用 IO 触发测距。下面介绍一下其在 Windows 10 IoT Core 环境下的用法。
项目运行在 Raspberry Pi 2/3 上,使用 C# 进行编码。
1. 准备
HC-SR04 ×1
Raspberry Pi 2/3 ×1
公母头杜邦线 ×4
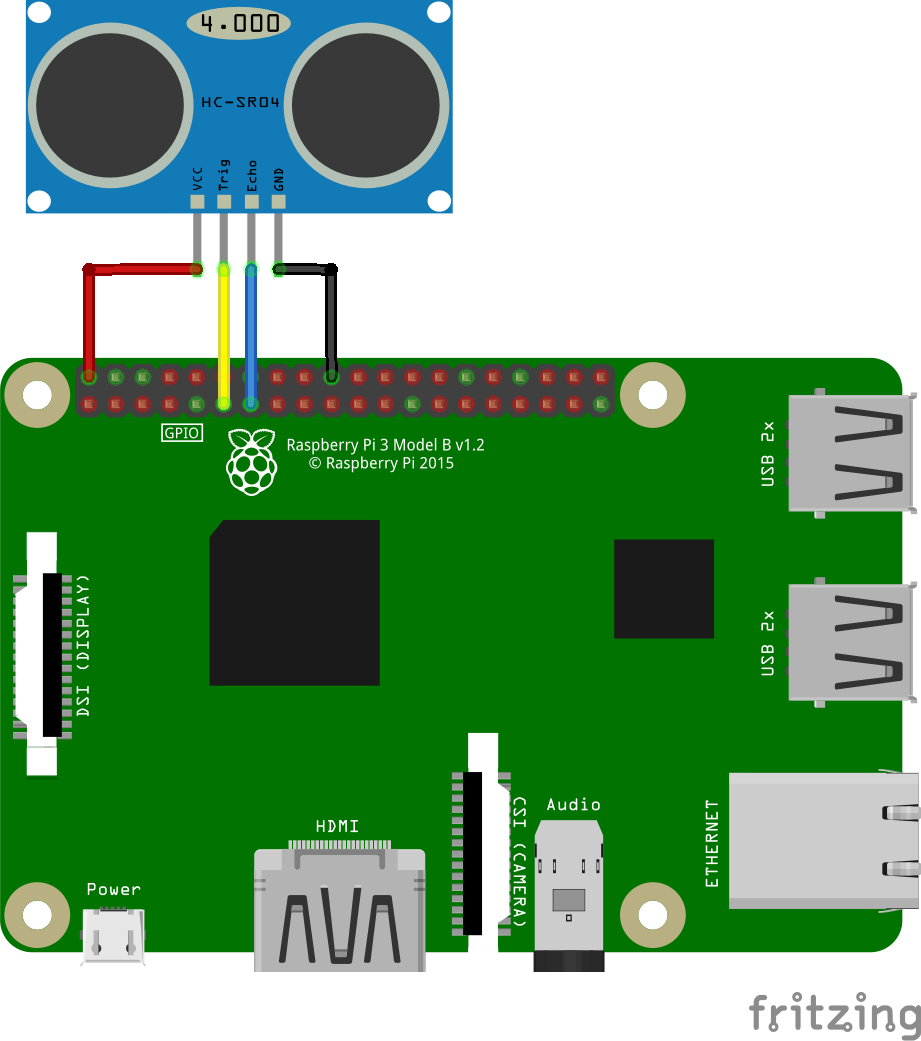
2. 连线
Vcc - 5V
Gnd - GND
Trig - GPIO 17 - Pin 11
Echo - GPIO 27 - Pin 13
3. 代码
GitHub : https://github.com/ZhangGaoxing/windows-iot-demo/tree/master/HC_SR04Demo
你需要在项目中添加一个 C# 代码文件 HCSR04.cs,将下面的代码复制粘贴,并且不要忘记添加引用 Windows IoT Extensions for the UWP
using System.Diagnostics;using System.Threading.Tasks;using Windows.Devices.Gpio;namespace HC_SR04Demo{ class HCSR04 { private int sensorTrig; private int sensorEcho; private GpioPin pinTrig; private GpioPin pinEcho; Stopwatch time = new Stopwatch(); /// <summary> /// Constructor /// </summary> /// <param name="trig">Trig Pin</param> /// <param name="echo">Echo Pin</param> public HCSR04(int trig, int echo) { sensorTrig = trig; sensorEcho = echo; } /// <summary> /// Initialize the sensor /// </summary> public void Initialize() { var gpio = GpioController.GetDefault(); pinTrig = gpio.OpenPin(sensorTrig); pinEcho = gpio.OpenPin(sensorEcho); pinTrig.SetDriveMode(GpioPinDriveMode.Output); pinEcho.SetDriveMode(GpioPinDriveMode.Input); pinTrig.Write(GpioPinValue.Low); } /// <summary> /// Read data from the sensor /// </summary> /// <returns>A double type distance data</returns> public async Task<double> ReadAsync() { double result; pinTrig.Write(GpioPinValue.High); await Task.Delay(10); pinTrig.Write(GpioPinValue.Low); while (pinEcho.Read() == GpioPinValue.Low) { } time.Restart(); while (pinEcho.Read() == GpioPinValue.High) { } time.Stop(); result = (time.Elapsed.TotalSeconds * 34000) / 2; return result; } /// <summary> /// Cleanup /// </summary> public void Dispose() { pinTrig.Dispose(); pinEcho.Dispose(); } }}
4. 如何使用
第一步调用构造函数将 HCSR04 实例化,请传入 Trig 和 Echo 的连接值
第二步调用 Initialize() 初始化设备
第三步调用 ReadAsync() 读取数据,返回的是一个 double 类型的值
当需要关闭设备时,调用 Dispose()
详见 GitHub
0 0
- 张高兴的 Windows 10 IoT 开发笔记:HC-SR04 超声波测距模块
- HC-SR04 超声波测距模块/硬件/软件
- STM32f407驱动hc-sr04超声波测距模块
- STM32控制超声波测距模块HC-SR04
- 树莓派 超声波测距模块HC-SR04
- 树莓派之HC-SR04超声波测距模块
- HC-SR04 超声波测距模块说明
- HC-SR04超声波测距代码
- HC-SR04 超声波测距模块 51串口读取代码
- HC-SR04 超声波测距模块 51串口读取代码
- Arduino 小玩意之 HC-SR04 超声波测距模块
- Banana Pi的GPIO应用以及驱动HC-SR04超声波测距模块
- 树莓派-超声波测距(HC-SR04)的使用
- 【Arduino】超声波模块(HC-SR04)
- arduino 超声波 HC-SR04模块
- HC-SR04超声波模块传感器
- Arduino+HC-SR04 实现超声波测距
- STM32与HC-SR04超声波测距
- Android 逆向工程 实践篇
- strlen函数的几种实现方法
- C语言实验——一元二次方程Ⅰ (sdut oj)
- myeclipse 2014新建maven web 项目步骤
- bzoj 1066 最大流
- 张高兴的 Windows 10 IoT 开发笔记:HC-SR04 超声波测距模块
- 广度优先搜索——马的遍历
- ffmpeg编译保留代码不做优化
- 求三角形面积 (sdut oj)
- bernate的集合映射与sort、order-by属性
- 微信LazyMan笔试题的深入解析和实现
- Windows下sqlmap安装方法之配置Windows下的环境变量
- POJ 1426 Find The Multiple (BFS)
- 求实数绝对值 (sdut oj)


