ROS会议 ROSCon 2017
来源:互联网 发布:jsp页面连接数据库 编辑:程序博客网 时间:2024/05/16 02:09
----ROSCon2012-2017----来源链接:https://roscon.ros.org






具体讲座的日程安排:
2017:https://roscon.ros.org/2017/
2016:https://roscon.ros.org/2016/
2015:https://roscon.ros.org/2015/
2014:https://roscon.ros.org/2014/program/
2013:https://roscon.ros.org/2013/program/
2012:https://roscon.ros.org/2012/schedule/
近三年ROSCon(2015-2017)都会将会议视频录像和文档公开~以下为机器翻译~
----2017----
ROSCon将于2017年9月21日至22日在加拿大温哥华举行!

那就是在加拿大温哥华温哥华会议中心的同一地点发生的IROS之前的星期四和星期五。所以如果你打算到IROS旅行,只需要加上几天的旅程,这样你可以加入我们在加拿大温哥华的ROSCon。
注册
ROSCon 2017的注册开放时间:
请注意,提前注册截止日期为2017年8月1日。
ROSCon 2017
ROSCon 2017是ROS开发人员的机会,从初学者到专家,花费两天的时间学习和与ROS社区联网。从专家那里获取技巧和技巧,并与其他开发人员会面并分享想法。
ROSCon是一个开发者大会,在PyCon和BoostCon的模型中。继过去五年ROSCons的成功之后,今年的ROSCon将在加拿大温哥华举行。与前几年类似,为期两天的课程将包括技术讲座和教程,向您介绍新的工具和图书馆,并教你们更多的知识。大部分节目将有30-40分钟的演讲(有些可能会更长或更短)。
我们的目标是ROSCon代表整个ROS社区,这个社区是全球性和多样性的。无论你是谁,无论你做什么,无论你做什么,如果你对ROS感兴趣,那么我们希望你在ROSCon加入我们。我们鼓励妇女,少数群体成员和其他代表不足的群体的成员出席ROSCon。我们期望所有与会者遵守我们的行为守则。
ROSCon计划委员会认识到,传统上低估代表团体出席的障碍可能有多种多样,我们正在整个规划过程中努力,使事件尽可能包容和可及。今年,我们为继续推行ROSCon多元化奖学金计划感到自豪,以帮助ROSCon 2017更加代表全球ROS社区。
我们也欢迎有什么建议我们可以做些什么来鼓励更多的参与。如果您有想要分享的想法,请与我们联系。
如果您不想正式演示,您应该将您的新项目或想法带给ROSCon,并将其呈现在闪电般的谈话中。
将有机会在ROSCon 发表一个闪电谈话。这些是2-3分钟的会谈,每天一次(过去3分钟,但今年可能会减少到2.5分钟或2分钟)。它的工作方式是你在早上的咖啡休息时间找到指定的人,以便在当天下午注册一个插槽。这是先到先得,它总是填满。作为注册的一部分,您可以选择提供2-3张演示幻灯片,将其载入公共笔记本电脑进行演示。幻灯片不是必需的,没有特殊的格式。虽然它必须在协调员笔记本电脑上工作,但建议使用常见的便携式格式(如pdf)。视频也可以,但应该编辑以适应时间限制,不应该依赖视频中的音频。考虑到时间限制,我们建议不要试图做一个现场演示。去年的谈话可以在这篇博文中看到,也可以浏览过去几年的录音。
还将有即兴黑客会议和非正式演示的开放空间。
如果您正在寻找有关过去ROSCons的信息,包括过去的节目,幻灯片和演示文稿的视频,请参阅他们单独的网站。
日期
ROSCon 2017的重要日期要记住。
征集投标书
2017年4月24日
提案截止日期
2017年6月25日
提案验收通知
2017年7月11日
提早注册截止日期
2017年8月1日
延迟注册开始
2017年8月31日
ROSCon 2017在加拿大温哥华。
2017年9月21日至22日
赞助商
白金赞助
黄金赞助商







银赞助




青铜赞助商












如果您有兴趣了解赞助ROSCon的更多信息,请联系组委会。或查看我们的发起人招股说明书。
今年新增:多元化奖学金赞助
今年首次,我们正在征求赞助商支持ROSCon多样性计划,该计划旨在使机器人社区中通常不足的人员参与ROSCon,使会议对所有与会者都具有更加丰富的经验。要了解去年计划的影响,该计划为来自10个国家的15位学者提供旅行和住宿费用,我们鼓励您观看苏丹喀土穆大学的两名学生艾哈迈德·阿卜杜拉和胡萨姆·萨利赫的这场闪电演讲正在极具挑战性的条件下启动机器人实验室。
有关这些和所有赞助机会的信息,请查阅 招股说明书。
位置
ROSCon 2017将在加拿大温哥华的温哥华会议中心举行。
公共交通
温哥华有一个旅行规划网站,以帮助你解决
地图
这是一个位置的地图。
鸟瞰图
会议折扣
如果您打算探索温哥华,请务必“显示您的徽章”,以便在各种场所和景点接收会议参加者的折扣。
住所
ROSCon 2017承认合作伙伴的价值和生产力,并与IROS 2017合作,为附近的酒店提供最大的折扣。必须通过以下酒店特定的链接进行预订。优惠价格将在下面的规定截止期限之前提供,或一旦房间满满,以先到者为准。
温哥华市中心万豪酒店 - 已售完
地址: 加拿大温哥华
西黑斯廷斯街1128号
,V6E 4R5
距离:0.2公里
房间价格:$ 229加元/晚(含客房内上网)
点击这里在线预订 星期三晚上折扣已售完
预订电话:+ 1-800-207-4150(参考IROS)
预订中止:2017年8月31日(太平洋下午5点)
费尔蒙特太平洋沿岸
只有从21日开始。
地址:
1038 Canada Place Way
Vancouver,BC,V6C 0B9
距离:0.01英里
房间价格:$ 339加元/晚(含客房内上网)
点击这里在线预订
预订电话:+ 1-877-900-5350(参考IROS)
预订中止:2017年8月25日(太平洋下午5点)
费尔蒙特海滨
地址:
900 Canada Place Way
Vancouver,BC,V6C 3L5
距离:0.2公里
房间价格:$ 299加元/晚(包括客房内上网)
点击这里在线预订
预订电话:+ 1-800-441-1414(参考IROS)
预订中止:2017年8月24日(太平洋下午5:00)
温哥华费尔蒙酒店
地址:
900 West Georgia Street
Vancouver,BC,V6C 2W6
房价:$ 249加元/晚
点击此处在线预订
预订电话:+ 1-866-540-4452(参考IROS)
预订中止:2017年8月24日(太平洋下午5点)
备择方案
对于那些想要查看其他位置的人,我们建议您搜索“所有房间”,以便进入当地住宿,包括airbnb和旅馆。
点击这里在所有房间附近搜索
ROSCon 2017和开放源代码机器人基金会不保证或对所有房间提供商做出保证,并不承担任何责任。
托儿选项
温哥华会议中心的公约服务团队提供以下列出的托儿服务,作为与会者的参考。ROSCon 2017和开放源代码机器人基金会不保证或对这些提供者做出保证,并且不提供此参考不承担任何责任。
Nannies on Call
Nannies on Call提供预先筛选的保姆服务,将来到您的酒店房间。此外,如果您决定旅行光线,他们还有出租儿童服务。
温哥华预订电话费用:每张预订$ 32CAD(代理费)+每小时16加元。附加费用可能适用。请访问网站以确定额外的定价。
网站:http : //www.nanniesoncall.com/families/on-call/babysitter-vancouver/
*价格截至3月23日,可能会有变动。请确认您选择的提供商。
如果您打算收养托儿服务,除了联系护理人员,请发送电子邮件至Karly [at]] MeetGreen.com。ROSCon致力于创建一个包容性和可访问的会议环境。通过提供这些信息,它将允许会议审查与会者的需求并评估部署会议资源的方式。
天气
温哥华天气可能会有很大变化。请在出发前检查天气并准备好。
有关历史数据,您可以在这里看到。
目前的天气在这里。
签证邀请函
如果您需要会议组织者的邀请来获得签证进入加拿大,请填写此表格。请填写您的全名和邮寄地址(包括在信件中;我们将通过电子邮件向您发送签名的信件)。
程序
ROSCon 2017计划
ROSCon 2017将是一场单轨赛。经计划委员会审查和讨论后,下列介绍被接受在会议上介绍。还将有闪电会议和海报会议,以及与其他社区成员非正式交谈的许多机会。
该程序可能会更改。
视频录像和归档由支持提供 
第一天,9月21日
(跳到第2天)
9:00Brian Gerkey和Tully Foote(开放机器人)开场白
9:25东京大学加藤欣培Autoware:基于ROS的OSS,用于城市自驾驾驶Autoware是由ROS授权的用于城市自驾驾驶的开源软件(OSS)。它提供了完整的感知,决策和控制模块,使得逐行车辆能够在公共道路环境中自主驾驶。Autoware目前的维护者是Tier IV,这是由教授和学生组成的日本学术创业公司。汽车制造商和供应商现在经常使用Autoware来构建他们自主驾驶移动的研发原型。Autoware也部分移植到了ROS2。任何研究人员,开发人员和从业人员都会期待这个演讲,他们正在寻找开源解决方案。
10:05Dirk Thomas和Mikael Arguedas(开放机器人)推动机器人发展未来的ROS 2愿景使用具体的用例,本次演讲将描述ROS 2用户将如何从原型到生产设计和实施其自主系统的愿景。它将突出显示ROS 2中可用的功能,或将来可能设想的功能,以及如何将其应用于构建更强大,灵活和强大的机器人系统。虽然演示文稿以简单的应用程序开始,但它随后利用更先进的功能,如内省和业务流程功能,使系统更复杂的场景,并将其硬化到生产就绪系统。
10:45大家咖啡时间(休闲时光
11:15基因库珀曼和眨眼耆那教(东北大学)DMTCP:修复ROS主站的单点故障ROS主人是众所周知的单点故障。用于透明检查点重新启动的DMTCP开源包最近被扩展为支持ROS主站的checkpointrestart。失败后,ROS主机将从上一个检查点回滚并恢复。检查点可以每隔几秒进行一次。DMTCP插件模型还允许用户添加在与检查点相同的状态下建模和重新启动外部设备的插件。最后,我们推测DMTCP的分布式模式在未来可以通过适当的插件来支持全局恢复。
11:35海梅·马丁·洛莎(eProsima)ROS2微调ROS2采用DDS / RTPS作为中间件,增加了ROS1的性能和功能。DDS公开了许多QoS参数,以使中间件适应不同的场景,允许使用XML文件轻松配置。本演示将展示如何为几个有趣的场景设置ROS2。
11:55保罗·波夫贝尔(Locus Robotics)通过ROS2桥接差距:ROS1中的Multirobot系统ROS1中不包含电池的一个常见应用是多机器人通信。实际上,这通常需要通过有损网络基础设施进行可靠或实时的通信。ROS1中的“多主机”存在几种公开的方法,但是它们往往不能满足生产系统的可靠性和QoS要求。随着即将提供的满足许多这些标准的稳定的ROS2实现,我们提出了一种实际的方法来实现ROS2 / DDS的ROS2 / DDS,用于实际和模拟的多机器人系统。
12:15Chris Lalancette(开放机器人)使用ROS2的Turtlebot2上的SLAM这个讲座将集中在一个更大的应用程序,完全在ROS2中编写。该应用程序是使用所有底层ROS2组件在Turtlebot2上运行的SLAM系统(Google制图工具)。该讲座将描述机器人的硬件和软件设置,以及开发应用程序时遇到的移植和其他挑战。
12:20Ruffin White(加州大学圣地亚哥分校)Gianluca Caiazza(威尼斯Ca'Foscari大学)SROS:当前进展和发展去年推出的是SROS的概念验证实施,SROS是支持现代安全的ROS生态系统的补充。此演讲将提供有关开发REPS的更新,并提供有关为ROS提供应用层安全性的机制的进一步细节。这包括通过完整的服务器/客户端验证加强API,标准化策略配置文件语法,用于主题,服务和参数的访问控制,以及通过审核安全日志事件的集成策略配置文件自动生成。您将更加熟悉SROS,其内部工作原理和方向,使您能够为将来保护机器人子系统的工作做出贡献并提供反馈。
12:25Aravind Sundaresan和Leonard Gerard(SRI International)安全ROS:在ROS系统中实施安全通信安全ROS是ROS的更新,允许安全通信,同时保持ROS公共API完整,并允许用户代码重新使用,无需修改。政策在执行时通过一个YAML文件提供,该文件指定授权订阅者和发布者的主题,参数的getter和setter以及服务的提供者和请求者。策略在IP地址级别指定,并由Secure ROS执行。结合IPSec进行加密,Secure ROS提供安全,经过身份验证和加密的ROS通信。对ROS代码库的修改仅限于ROS主服务器和客户端库(rospy和roscpp)。
12:30Georgios Stavrinos和Stasinos Konstantopoulos(NCSR“Demokritos”)rostune包:分布式ROS节点的监控系统rostune是一种帮助ROS开发人员以最有效的方式分发节点的工具。它收集和可视化主题和节点的统计信息,如CPU使用率和网络使用率。在这个演讲中,我们将介绍一个关于rostune的技术细节和一个开发家庭辅助机器人的正在开发的项目的特征用例,其中可以在机器人的车载计算机和家庭可用的计算单元之间分配处理。
12:35大家午餐
13:55Andreas Fregin,Markus Roth,Markus Braun,Sebastian Krebs和Fabian Flohr(戴姆勒公司)用ROS构建计算机视觉研究车戴姆勒(梅赛德斯 - 奔驰)在ADAS系统和自主驾驶研究与开发方面有悠久的历史。今天越来越复杂的传感器,算法和融合要求对底层软件框架提出了高要求。在这次演讲中,戴姆勒研发部门模式识别和相机展示了他们最新的研究工具。另外,给出了实现的多传感器同步系统的详细情况。还将讨论结果和经验教训以及工具修改和附加功能。观众将在高数据吞吐量的背景下获得数据处理的见解。
14:15Juraj Kabzan,Miguel De La Iglesia Valls,Huub Hendrikx,Victor Reijgwart,Manuel Dangel,Fabio Meier,Ueli Graf和Efimia Panagiotaki(ETHZürich,AMZ)自由式赛车为公式学生无人驾驶作为AMZ赛车无人驾驶赛,我们正在与“flüela”进行第一次配方学员无驾驶比赛,这是一款具有高轮扭矩的电动4WD车,并在2015年由我们团队开发的轻型设计(0.9公里,0-100公里/小时)自行赛车,LiDAR,自主开发的立体视觉惯性系统,IMU,GPS和速度传感器已经扩展。我们选择在我们的主从计算系统上使用ROS Indigo,因为它提供了一个强大而灵活的框架来界定我们自主系统的不同组件。此外,我们广泛使用其记录功能和强大的可视化和仿真工具。
14:35克里斯·奥斯特伍德(Carnegie Robotics)如何选择3D传感器技术系统开发人员在设计机器人时面临着新的挑战 - 哪些3D感知技术要使用?市场上有各种各样的传感器,采用立体声,ToF相机,激光雷达和单眼3D技术。这个演讲将包括各种3D传感器模式,其一般功能和限制的概述,对我们受控环境和现场测试过程的回顾,以及通过该测试发现的一些令人惊讶的特征和局限性。没有完美的传感器,但总是有一个最符合应用要求的传感器 - 您只需要找到它。
14:55大家闪电谈话我
15:40大家咖啡时间(休闲时光
16:10陈恩和卡洛斯·阿格罗(开放机器人)汽车和城市模拟与凉亭和ROS自主驾驶正在成为机器人的热门地区,吸引了研究界和行业的兴趣。开放机器人技术已经越来越多地需要资源来帮助在凉亭建造车辆模拟。在本演讲中,我们将介绍我们最近在车辆和城市模拟方面的工作。我们制作了一系列组件,包括3D车辆模型,材料和插件,道路网络描述文件库和程序城市生成工具。我们将展示使用ROS界面和rviz可视化的演示,并描述用户如何使用这些组件创建自己的车辆模拟
16:30陈恩和路易斯·布布尔(开放机器人)空间机器人挑战后台:瞥见竞争对手的挑战在过去一年中,数百个团队参加了美国航空航天局空间机器人挑战赛的资格赛,前20名队伍参加了最终的基于云计算的比赛。这个演讲将介绍用于主持Space Robotics Challenge的软件和基础设施,其中包括使用ROS,Gazebo和CloudSim。我们还将介绍一些竞争中面临的技术挑战,包括模拟建模,性能调整和云部署。
16:50Juan Camilo Gamboa Higuera,David Paul Meger和Gregory Dudek(麦吉尔大学)从模拟到现场:学习与AQUA机器人游泳在本次会议中,我们将分享我们的经验,并描述我们基于学习的控制方法。我们在水下(海洋)环境中做到这一点,我们想要在6个自由度近似一些流体力学因素。我们的工作通过AQUA平台的游泳控制器的自动合成来解决“学习游泳”:六条腿自主水下航行器。首先,我们将描述我们的模拟AQUA机器人水下动力学的方法。这个描述包括我们的建模选择和融入Gazebo模拟器。其次,我们将描述我们开发的基于ROS框架的软件界面,用于在仿真环境中测试学习算法。最后,我们将展示ROS如何促进我们在物理机器人上使用我们的软件,
17:10Gajamohan Mohanarajah和Dhananjay Sathe(Rapyuta Robotics)Thomas Michael Bohnert(苏黎世应用科技大学/ ZHAW)如何使用云机器人平台加速应用程序开发在本演讲中,与会者将获得有关如何使用云机器人平台即服务(PaaS)的实际知识,以显着加速机器人应用开发。具体来说,与会者将逐步了解如何使用云机器人PaaS开发,远程部署,监控和调试机器人应用程序。接下来是rapyuta.io的内部部件的详细技术细节,所以与会者可以了解底层的架构和设计。最后,一个案例研究将使用亚马逊的基础设施即服务将商业机器人应用程序部署到使用rapyuta.io云机器人PaaS的商业机器人应用程序部署,以显示每种方法的优点和局限性。
17:15Yvonne Dittrich(哥本哈根IT大学)Gijs van der Hoorn(代尔夫特理工大学)Andrzej Wasowski(哥本哈根IT大学)ROS如何关心质量作为欧盟H2020项目的一部分,ROSIN推动了ROS用于工业应用的使用,我们调查了ROS社区如何照顾质量。目标是了解质量问题并解决问题。我们将根据a)分析ROS包和基于ROS的项目中的错误报告来报告我们的初步发现; b)与ROS社区的初级和核心成员进行面谈; 和c。)分析ROS wiki和其他可用资源。
17:20王斌王高杰(济南托尼机器人)RoboWare:面向ROS开发人员的“面向产品的设计”IDERoboWare是专为ROS设计的开发套件。它提供了一个集成的开发环境,具有通用的IDE功能:代码编辑,构建和调试; 它完全支持ROS,包括创建和管理工作区,软件包,库,节点,msg / srv / action / launch / yaml / urdf文件等。RoboWare支持“POD(面向对象设计)”开发,它具有图形化机器人硬件架构设计师,设计图可以自动导出为ROS工作区进一步开发。它还提供了一个GUI开发框架,它具有大量与机器人相关的控件,并且是跨平台的
17:25Jordan Allspaw和Carlos JR Ibarra Lopez(马萨诸塞州洛厄尔大学)ROS.NET Unity for Multiplatform应用程序我们介绍ROS.NET,一系列允许托管.NET应用程序与传统ROS节点通信的C#项目,然后我们提供一个允许Unity应用程序与ROS集成的包装器。Unity是一款可用作3D渲染引擎和物理引擎的游戏设计工具。我们介绍了ROS和Unity两种应用,一种是ROS虚拟现实引擎的形式,可用于机器人可视化和控制,另一种是Project Tango设备驱动程序,也可用于可视化和控制,我们打算增加3D扫描和重建。
17:30佩里恩·阿奎亚(Ruben Smits)(联运)使用Google探戈与ROS对于想要使用新的传感器扩展机器人进行室内定位和3D感知的开发人员,Intermodalics创建了Tango ROS Streamer App。这个用于Tango兼容设备的Android应用程序使用Tango的视觉惯性测距(VIO)算法,摄像机图像和点云进入ROS生态系统,提供实时3D姿态估计。该应用程序已经在PlayStore上免费提供,其代码是完全开源的。
17:35利维·阿姆斯壮(西南研究所)几何约束过程的机器人路径规划该建议涵盖了从工业过程如绘画或砂光三维几何自动生成有效的工具路径计划框架的开发。这些工作分为三个主要的软件模块。第一个模块分析3D数据,将特征提取到所需的过程。第二个模块用于这些功能,以生成最佳地执行单个功能的过程的工具路径。最终的模块序列计划确定了处理整个零件的最佳顺序。
17:40Marco Esposito和Salvatore Virga(慕尼黑技术大学)easy_handeye:人类的手眼校准手眼校准是使机器人与其环境(包括人类)之间的相互作用的“必要的邪恶”。确定机器人的坐标系和所使用的相机之间的精确几何变换是令人讨厌的,因为它是重要的,以避免已经在距离米的多厘米的误差。简单的手工是一种新的ROS包,旨在促进手眼校准的计算和管理,同时保持库对硬件完全通用,并鼓励用户采用迄今为止已知的最佳实践。
17:45Darby Taehoon Lim,Yoonseok Pyo和Leon Ryuwoon Jung(ROBOTIS)介绍OpenManipulator; 全开机器人平台这个公告将讨论一个OpenManipulator,一个TurtleBot3的朋友。以前的TurtleBot系列能够通过“TurtleBot Arm”执行操作功能。在TurtleBot3中,该功能将是“OpenManipulator”。支持ROS的OpenManipulator是由OpenSoftware,OpenHardware和OpenCR(Embedded Board)组成的全开机器人平台。预计ROS用户将能够轻松升级TurtleBot3。我们的目标是通过TurtleBot 3和OpenManipulator来支持我们所需要的大部分功能,作为服务,学术,研究和教育机器人平台。
17:50伊拉亚·巴拉诺夫和托尼·巴尔托夫斯基(Clearpath Robotics)Turtlebot Euclid - 更好的介绍ROSTurtlebot Euclid是Clearpath Robotics与iRobot和Intel合作的新项目。这个演讲将介绍一下平台和设计原则。这包括前几代Turtlebots的学习,传感器和计算能力的进步,以及获得更好的社区软件。Turtlebot Euclid显示了大型工业合作伙伴对ROS的明确承诺,Euclid模块默认使用ROS Kinetic进行运输。演示移动设备新用户的易用性和远程使用情况。
18:00大家前台
20:00
鳍
第二天9月22日
(跳到第1天)
9:00Martin Pecka(布拉格捷克技术大学)Sergio Caccamo(Kungliga Tekniskahögskolan(KTH Stockholm))] Renaud Dube(ETH苏黎世)VladimírKubelka(布拉格捷克技术大学)搜索和救援机器人ROS:在TRADR期间学到的工具和经验教训搜索和救援机器人技术是一个非常具有挑战性的广泛的机器人领域,最近已经取得了巨大的进步。在过去3年中,欧盟的TRADR项目调查了上述领域的许多方面。通过这次演讲,我们希望与ROS社区分享基于ROS高级使用,测试和使用各种硬件以及与最终用户组成人机交互团队的系统开发中所获得的经验在搜救任务期间。
9:40IngoLütkebohle(博世公司研究)ROS中的决定论 - 或者什么时候/有时候/如何解决它?ROS的基础风格,异步,松散耦合的计算图,非常适合重用和分配,但有一个catch:Nothing保证执行顺序。这意味着,即使输入相同,回调和定时器的执行顺序也会发生变化。在许多重要的情况下,这导致不同的结果,并且 - 巧妙或不巧妙 - 改变了机器人的行为。例如,在常见的move_base节点中,我们发现反应时间在50到200ms之间变化,而纯计算时间只有20ms。我将展示为什么会发生这种情况,以及如何解决这个问题,无论是在move_base还是在一般情况下。
10:20Michael Naderhirn,MischaKöpf和Josef Mendler(Kontrol GmbH)使用ROS和凉亭进行安全关键控制器设计的基于模型的设计本演讲概述了使用ROS和Gazebo的安全关键控制器的“Kontrol”开发环境。我们首先分析不同应用的安全关键控制器的现有标准,并介绍一项广泛的行业调查结果,结论是在串行开发阶段花费了70-80%的开发成本。为了克服这个负担,我们提出了一个基于模型的开发环境的方法,大大降低了这一成本。我们展示了ROS和凉亭如何可以集成到一个开发工具中。最后,我们演示使用Scilab的ROS和ROS2节点的自动代码生成。
10:40大家咖啡时间(休闲时光
11:10克里斯·史密斯(Rethink Robotics)rosnodejs多年来,RosBridge套件(和它相应的JavaScript库roslibjs)一直是集成ROS和JavaScript的最实用的方法。虽然这种组合在轻量级应用程序中运行得很好,也可以作为将ROS主题抽入网页的原型解决方案,随着系统需求的增加,它开始崩溃。随着后端JavaScript引擎的普及,特别是Node.js的兴起,依靠RosBridge连接ROS和JavaScript代码成为具有严重性能要求的工业应用程序的瓶颈。新的网络技术(如Electron)也使得在Node.js中集成本地ROS客户端库的前景更具吸引力。
11:30贾斯汀黄和玛雅·卡马克(华盛顿大学)与Polymer和ROS的反应性Web界面本次演讲将介绍一系列基于Robot Web Tools构建的Web组件,可以轻松构建复杂的ROS集成Web应用程序,而无需编写多个代码。使用聚合物库与这些组件有助于使可访问和移动友好的应用程序。我们将展示如何使用这些组件并显示一些常见的Web编程模式。另外,我们将展示我们使用这些工具开发的一些复杂的Web应用程序,包括演示界面的编程,基于Web的RViz版本和ROS图形浏览器实用程序。
11:50胡伊·伊格纳西奥·乌贝拉和朱利安·克鲁蒂(Ekumen)开发Android机器人Android设备已经成为世界上强大和流行的计算系统。他们的处理能力以及传感器,通信外设和GPU的硬件集成使他们成为构建机器人的有趣的替代平台。最近将AR技术纳入移动设备,如Google探戈,可以改善他们对物理环境的看法,开辟新的可能性。在本次会议中,我们将展示如何构建一款我们称之为Tangobot的Android机器人,它是一个由Tango手机和Kobuki基地组成的自主导航机器人,作为准备使用起点构建其他Android动力机器人。
12:10大冢川(宇都宫大学)石井太郎(九州理工学院)Yuhei Sugata(宇都宫大学)Hakaru Tamukoh(九州理工学院)符合ROS标准的FPGA组件技术 - FPGA安装到ROS中想象一下,如果您可以使用FPGA作为ROS节点,会发生什么!FPGA被称为用于包括图像识别处理以及深层神经网络的应用的功率高效的硬件平台。然而,基于FPGA的系统的开发成本很高,将FPGA集成到机器人系统中。为了解决这个问题,我们提出符合ROS标准的FPGA组件技术,可以方便地将FPGA器件集成到机器人系统中。展示了两个演示系统:1)ROS兼容的FPGA组件,从相机图像中提取特征提取处理; 2)餐厅服务机器人在ROS系统中使用FPGA。
12:30大家午餐
13:50SebastianPütz(奥斯纳布吕克大学)Jorge SantosSimón(Magazino GmbH)引入高度灵活的导航框架:Move Base Flex我们将Move Base Flex(MBF)作为向后兼容的move_base替代品。MBF可以为move_base使用现有的插件,并提供相同ROS界面的增强版本。它暴露了用于规划,控制和恢复的操作服务器,提供了当前状态和插件反馈的详细信息。外部执行逻辑可以使用MBF及其操作来执行智能和灵活的导航策略。Magazino已经在客户设施中成功部署了MBF,以在高度动态的环境中控制TORU机器人。此外,MBF可以使用其他地图表示,例如网格
14:10大卫·路(Locus Robotics)地方规划基础这个讲座探讨了本地规划师的基本概念,以及不同的假设和实现对机器人行为的影响。我们还提供了一个模块化的本地计划程序,将单片dwa_local_planner打破为可以作为插件加载的更清洁的独立组件。通过将本地规划的基本概念映射到不同的模块,我们的计划者呈现出更加渐进的学习曲线,更高的可定制性和更高的调试/内省能力。
14:30Luca Marchionni(PAL机器人)如何设计ROS动力机器人在PAL机器人方面,我们使用ROS框架来设计模块化,可配置和可测试的软件。我们所有的机器人,从小型移动基地到人体大小的两足动物,都是不断审查,适应和改进的过程的结果。在本演讲中,我们将介绍我们开发软件时所学到的一些经验教训,以及如何为机器人设计模块化组件。基于OROCOS和ros_control的控制软件架构将与我们当前使用的ros_controllers一起显示。我们将特别关注全身控制作为一种高效的冗余分辨率控制器,允许操作员在人造机器人上生成实时运动。
14:50大家闪电会谈II
15:35大家咖啡时间(休闲时光
16:05马特罗宾逊(西南研究所)Mirko Bordignon(弗劳恩霍夫IPA)Min Ling Chan(ARTC - A * Star)ROS工业:私人和公共资金在全球推进ROSROS-Industrial成为一个全球举措,涉及三个地区联盟的50多个组织,其中包括原始设备制造商和制造行业的主要参与者。这种强大的私人支持得到了大量公共资金的支持。该演讲将说明目前的行动方向,利用这种资金,旨在以“机器人数字化工业平台”为特征,补充基于社区的ROS精神。其中包括:建立亚太地区发展小组; 培训活动,专门为自动化专业人员开发的课程; 更广泛的系统集成商参与; 特别技术发展与混合资金计划。
16:25Michael'v4hn'Görner(汉堡大学,TAMS集团)升级MoveIt!MoveIt!是ROS中主要的移动操作框架,可以使用它来控制机器人手臂。这个演讲会给你一些升级MoveIt的理由!它将指出一些升级您的整体MoveIt的方法!经验,既使用现成的框架,以及利用第三方组件。特别地,提出了一种新的运动学插件生物学,其允许各种约束类型的组合,并且在灵活性,近似解决方案的质量和性能方面在先前的插件上大大改进。
16:45Adam Allevato(开放机器人)Karsten Knese(博世)使用ROS2进行基于视觉的操作与工业机器人这个讲座描述了使用工业机器人的两个ROS 2操纵管道的开发。在最新的ROS 2版本中,beta2,命名空间,生命周期节点和组合等关键功能允许控制器结构,其中控制器可以在运行时动态加载并在外部进行管理。ROS 2多节点执行器还允许我们构建一个低开销的3D计算机视觉管道。我们描述如何利用这些概念来控制UR5工业机器人(Linux)和ABB YuMi机器人(Windows)。我们调查在ROS 2中开发这些系统所涉及的方法,挑战和最佳做法。
17:05Ugo Cupcic(影子机器人)我们建立了一个开放的沙箱,用于训练机器手来掌握事物影子机器人公司首席技术架构师Ugo Cupcic将利用他的工作,开发机器人抓取器,讨论公共模拟沙箱,用于训练机器手来掌握物体。您将学习:1)通过Web界面轻松地在云中(或本地 - 以与操作系统无关的方式)生成(并构建)模拟程序,方便可视化2)使用Keras轻松培训模型以实现抓取稳定性预测3)使用沙箱加强使用贝叶斯学习的演示,并将其重播在真正的机器人上
17:25Ryan Gariepy结束语
17:35
鳍
征集建议书
提案截止日期:2017年6月25日
邀请有关ROS相关话题的演讲。示例包括将与会者介绍给ROS包或图书馆,探索如何使用工具,操纵传感器数据和机器人的应用程序。
鼓励妇女,少数群体成员和其他代表性不足的群体成员向ROSCon提交提交建议。
提案将由计划委员会进行审查,以评估适合性,影响力和平衡性。
我们不能提供不推荐的演示文稿!如果有一个话题要提交,请提出。如果您有一个重要主题的想法,您不想表达自己,请发布在ROS话语讨论。
主题区域
所有与ROS相关的工作都被邀请。感兴趣的主题包括:
最佳做法新包装
机器人特定开发
机器人模拟
安全防范
嵌入式系统
产品开发与商业化
研究与教育
企业部署
社区组织和方向
测试,质量和文档
机器人比赛和合作
要了解ROSCon的内容和语调,请查看前几年的幻灯片和视频。
提案格式
会议提案必须包括:
标题主持人(姓名和职务)
推荐持续时间:短(约20分钟)或长(约40分钟)
摘要[最多100字]:用于广告演示
说明[最多1000字]:大纲,目标(观众学习什么?),指向要讨论的包的指针
请确保在您的建议书中包含足够的信息,供计划委员会评估演示文稿的重要性和影响。与公开资源的链接(包括代码存储库和演示视频)特别有用。
提交
更多信息
组织委员会
伊丽莎白克罗夫特Tully Foote
罗伯特·弗里德曼
Ryan Gariepy
Brian Gerkey
迪安娜·胡德
计划委员会
Niharika Arora(Fetch Robotics)伊丽莎白Croft(UBC)
丹尼斯恩(Clearpath Robotics)
Tully Foote(开放式机器人)
Ryan Gariepy(Clearpath Robotics)
Brian Gerkey(开放机器人)
迪安娜·胡德(开放机器人)
蔡琴侠(Mayfield Robotics)
IngoLütkebohle(博世)
伊恩·麦克马洪(Rehh Robot Robotics)
Allison Thackston(丰田研究所)
多元化主席
迪安娜·胡德ROSCon 2017多元化奖学金
ROSCon 2017组委会旨在为ROSCon代表整个ROS社区,这个社区是多元化和全球化的。除了促进开源的技术之外,我们还努力确保我们的社区本身尽可能开放和便利,因为我们认识到多样性有利于整个ROS生态系统。
无论你是谁,无论你做什么,无论你做什么,如果你对ROS感兴趣,那么我们希望你在ROSCon加入我们。为了减少出席会议的财务障碍,ROSCon组委会向技术界传统的代表性不足群体的成员提供了一些奖学金。
有关更多信息,请参阅ROS博客上的公告。
过去的事
ROSCon自2012年以来每年举行一次。如果您想了解更多信息,我们将会对所有过去的节目进行录像,并录制会议记录和大部分幻灯片。这些网站可以在下面的位置找到。
ROSCon 2016首尔,韩国ROSCon 2015汉堡,德国
ROSCon 2014芝加哥,美国
ROSCon 2013斯图加特,德国
ROSCon 2012圣保罗,美国
行为守则
为了确保每个人都有安全的环境,我们期望所有参与者遵循会议的行为守则。
社交媒体
#ROSCon2017 #ROSCon @osrfoundation @rosorg
----2016----
ROSCon 2016!
在令人兴奋的周末之后,我们在首尔告别了ROSCon 2016。这是创纪录的,超过450人参加,比去年同期增长了60%。
感谢大家的光临和支持!并感谢我们的赞助商的财务支持,使会议成长!
请继续关注下一个活动的详细信息。
我们已经发布了关于Vimeo的所有会谈的视频。您可以在这里浏览它们,或者在程序中发现它们,以及演示者提交的幻灯片。

照片来源:Evan Ackerman
ROSCon将于2016年10月8日至9日在韩国首尔举行!
这是在韩国附近的大田发生的IROS之前的周末。所以,如果你打算去IROS旅行,只需要几天的时间到达这个行程,这样你可以加入我们在韩国首尔的ROSCon。
注册
ROSCon 2016的注册已关闭。
ROSCon 2016
ROSCon 2016是ROS开发人员的机会,从初学者到专家,花了两天的时间学习和与ROS社区的联网。从专家那里获取技巧和技巧,并与其他开发人员会面并分享想法。
ROSCon是一个开发者大会,在PyCon和BoostCon的模型中。继过去四届ROSCons的成功之后,今年的ROSCon将在韩国首尔举行。与前几年类似,为期两天的课程将包括技术讲座和教程,向您介绍新的工具和图书馆,并教你们更多的知识。大部分节目将有30-40分钟的演讲(有些可能会更长或更短)。
我们的目标是ROSCon代表整个ROS社区,这个社区是全球性和多样性的。无论你是谁,无论你做什么,无论你做什么,如果你对ROS感兴趣,那么我们希望你在ROSCon加入我们。我们鼓励妇女,少数群体成员和其他代表不足的群体的成员出席ROSCon。我们期望所有与会者遵守我们的行为守则。
ROSCon计划委员会认识到,传统上低估代表团体出席的障碍可能有多种多样,我们正在整个规划过程中努力,使事件尽可能包容和可及。今年,我们很自豪地推出了ROSCon多元化奖学金计划,以帮助使ROSCon 2016更具代表性的全球ROS社区。
我们也欢迎有什么建议我们可以做些什么来鼓励更多的参与。如果您有想要分享的想法,请与我们联系。
如果您不想正式演示,您应该将您的新项目或想法带给ROSCon,并将其呈现在闪电般的演讲中,或提出“鸟之鸟”会议。
将有机会在ROSCon 发表一个闪电谈话。这些是2-3分钟的会谈,每天一次(过去3分钟,但今年可能会减少到2.5分钟或2分钟)。它的工作方式是你在早上的咖啡休息时间找到指定的人,以便在当天下午注册一个插槽。这是先到先得,它总是填满。作为注册的一部分,您可以选择提供2-3张演示幻灯片,将其载入公共笔记本电脑进行演示。幻灯片不是必需的,没有特殊的格式。虽然它必须在协调员笔记本电脑上工作,但建议使用常见的便携式格式(如pdf)。视频也可以,但应该编辑以适应时间限制,不应该依赖视频中的音频。考虑到时间限制,我们建议不要试图做一个现场演示。去年的谈话可以在这篇博文中看到,也可以浏览过去几年的录音。
还将有一个开放空间的鸟类(BoF)会议,即席黑客会议和非正式的演讲。
如果您正在寻找有关过去ROSCons的信息,包括过去的节目,幻灯片和演示文稿的视频,请参阅他们单独的网站。
日期
请注意ROSCon 2016的重要日期。
征集投标书
2016年5月25日
提案截止日期
2016年7月11日
提案验收通知
2016年7月22日
提早注册截止日期
2016年8月26日
延迟注册开始
2016年10月2日
ROSCon 2016在韩国首尔。
2016年10月8日至9日
赞助商
白金赞助

黄金赞助商



银赞助




青铜赞助商







会议的朋友



如果您有兴趣了解赞助ROSCon的更多信息,请联系组委会。或查看我们的发起人招股说明书。
参展商的信息可以在这里找到。
位置
ROSCon 2016将在首尔康拉德举行。
酒店的团体价格已经卖完了; 然而,房间可能仍然可以通过酒店预订网站
首尔的令人兴奋的城市,以及康拉德的舒适和便利设施,为ROSCon 2016提供了理想的位置。展览美丽的汉江景色,康拉德位于汝矣岛商业区的中心地带,方便客人前往Incehon机场。点击此处查看交通信息。
停車處
康乐报首尔的自助停车位是免费的。进入停车场后,扫描仪将注册参加者的盘子详细信息。停车后,参加者必须在会议登记处完成车辆登记,并在停车场系统中更新参加者车厢的车牌和登记详情。如果您不在登记处完成车辆登录,则在您离开停车场时将收取费用。
地址
康莱德首尔
10古吉宝隆路(汝矣岛)
首尔,东北坡首尔,07326
韩国
电话:+ 82-2-6137-7000
地图
托儿选项
首尔康拉德公约服务团队提供以下列出的托儿服务,作为与会者的参考。ROSCon 2016和开放源代码机器人基金会不保证或对这些提供商做出保证,并不承担任何责任。
您还可以联系Conrad 的酒店礼宾服务,以获得更多的托儿服务。电话:+800 00 266 723
保姆韩国
电话:+82(0)10 5454 7803
电子邮件: bongsunyoo0103@gmail.com
价格*:每1小时韩国 4万韩元/ 2小时(每1小时20,000韩元)10点以后的运费
:15,000韩元
儿童世界
电话:+82(0)10 9015 5790
电子邮件: ghilp@hanmail.net或ghilp@naver.com
价格*:每1小时3小时/每小时KRW 100,000 /(每增加1小时3万韩元)
星期六,国庆假期:上述基本费用+ 30%
11点以后的运费:30,000韩元
*价格截至6月20日,可能会有变动。请确认您选择的提供商。
如果您打算收养托儿服务,除了联系护理人员,请发送电子邮件至Karly [at]] MeetGreen.com。ROSCon致力于创建一个包容性和可访问的会议环境。通过提供这些信息,它将允许会议审查与会者的需求并评估部署会议资源的方式。
签证邀请函
如果您需要会议组织者的邀请获得签证进入韩国,请填写此表。请填写您的全名和邮寄地址(包括在信件中;我们将通过电子邮件向您发送签名的信件)。
程序
ROSCon 2016计划现已推出!
ROSCon 2016将是一次单轨赛。经计划委员会审查和讨论后,下列介绍被接受在会议上介绍。还将举行闪电会议和羽毛会议,以及与其他社区成员非正式交流的许多机会。
现场直播
由于技术上的困难,直播流将无法使用。10月20日,会议网站将提供演示文稿的存档视频。
视频录像和归档由支持提供
地点
注册:Grand Ballroom 3,Level 3一般会议:大宴会厅1-2,3级
茶歇:门厅和大宴会厅3,3级
接待处:门厅和大宴会厅3,3级
午餐:门厅和公园宴会厅1-3,5级 注意:演示的确切安排可能会更改。
第一天,10月8日
(跳到第2天)
9:00Brian Gerkey开场白
pdf 视频9:10Steffi Paepcke,Louise Poubel(OSRF)凉亭里有什么新鲜事?升级您的模拟用户体验!凉亭是ROS社区中最常用的模拟器之一。过去几年来,它一直在大力发展,其最新版本,Gazebo 7,为新兴和有经验的用户提供了无数新的工具和功能。最近,凉亭开发强调以用户为中心的设计和改进的可用性。更新不仅包括改进的GUI工具和新人员的文档,还包括简化有经验的用户的工作流程的工具。我们探索新功能,包括:模型编辑器,建筑编辑器,应用力工具,记录和回放,模型对齐和快照工具,摄像机角度控制,绘图,内省和调试辅助等。pdf 视频9:50迪安娜·胡德,威廉·伍德尔(OSRF)ROS 2更新本讲座将总结自2015年上次ROSCon更新以来取得的进展。摘要将包括在此期间发布的阿尔法,支持的实施方式的更改以及路线图。该演讲还将包括演示我们在演示和基准测试中使用ROS 2时的新功能和亮点。pdf 视频10:30大家咖啡时间(休闲时光
11:00Mukunda Bharatheesha(代尔夫特理工大学),Ruben Burger(代尔夫特理工大学),Maarten De Vries(开发商,Delft Robotics BV),Gijs van der Hoorn(代尔夫特理工大学),Martijn Wisse(代尔夫特理工大学)计划赢得MoveIt! - 从亚马逊挑战挑战2016获得的经验教训本演讲将重点介绍一些关键的MoveIt!我们(代尔夫特队的运动规划团队)在2016年亚马逊采购挑战赛中遵循的做法。特别是以下几点将突出显示:1)做出适当的MoveIt!来自大量选项的API选择; 2)使用Octomaps和相应解决方案遇到的诸如I / O同步轨迹和碰撞检查等困难; 3)解决问题(大多是机器人驱动程序),同时围绕机器人的联合限制进行规划; 和4)关于使用MoveIt!的OMPL计划程序配置的一般建议。pdf 视频11:20Matthieu Amy(雷诺SAS),MichaëlLauer(LAAS-CNRS),Jean-Charles Fabre(LAAS-CNRS)ROS上的自适应容错:基于组件的方法每个系统在其使用寿命期间都会发展。当面临变化(新的威胁,失败,更新)时,依然可靠的系统被称为弹性。我们提出了一种安全和自适应容错方法,利用基于组件的软件工程技术来解决弹性计算的一个关键方面,即在线适应容错机制。我们将展示如何在ROS上实现这种方法,并解释一些实现细节以及不同实验的结果来验证解决方案。我们还将讨论如何使用检查点技术来使ROS主机容错pdf 视频11:40Niharika Arora(Fetch Robotics)机器人校准校准是几乎任何机器人的必备条件。我们创建了一个快速,准确和机器人学的校准系统,除了典型的相机内在功能和/或外在功能之外,还可校准机器人几何。该系统可与各种特征检测器一起使用以更新成本函数,并使用CERES优化器进行凸优化。系统然后创建一个包含校准参数的更新的URDF。本讲座将介绍机器人诊断软件包的详细信息,并描述其在fetch_calibration软件包中的使用,可以在短短3分钟内对Fetch机器人进行几十个参数的校准。pdf 视频12:00IñigoMuguruza Goenaga,AlejandroHernándezCordero,VíctorMayoral Vilches(Erle Robotics)robot_blockly包:用块编程ROSrobot_blockly是一个ROS包,允许用户创建基于ROS的算法和行为,使用块来提取其复杂性。封装的目的是通过功能块隐藏编程机器人的复杂性。根据经验,平均博士生需要3周的时间来学习ROS。这使得ROS编程在绝大多数情况下无法访问。robot_blockly包旨在简化使用ROS的过程,将概念块放在一起。pdf 视频12:20大家午餐
13:50Yoonseok Pyo,Yoshihiro Shibata,Ryuwoon Jung,Taehoon Lim(ROBOTIS)介绍Turtlebot3Turtlebot3有三个概念:一个小型,可扩展的,开放的机器人平台。新Turtlebot的目标是降低平台的尺寸和成本,而不会降低功能,功能或质量。首先,我们将提供足够的小尺寸Turtlebot3,而不需要在书包里装载手提箱。其次,我们将为机械结构定制提供可扩展性,并提供了一些替代选项:开源嵌入式板,计算机和传感器。我们将介绍Turtlebot3的12个例子。第三,我们将提供开源H / W,F / W和S / W。您可以根据需要更改Turtlebot3设计。pdf 视频14:10Amit Moran,Matthew Curfman(英特尔 - 感知计算)引入英特尔RealSense机器人一体式感知设备如果创造感知机器人会是一件容易的事情呢?只需即插即用 你会怎么做?英特尔®RealSense™技术是硬件和软件的组合,用于围绕机器感知创造创新。其中,硬件包括深度摄像机,软件包括人机跟踪,场景拍摄,对象识别等一系列CV算法。在本次演讲中,我们将介绍在创新实验室开发的创新型一体机器人感知设备这可以促进任何机器人项目的发展,并使机器人的感知,几乎零安装。pdf 视频14:30VíctorMayoral Vilches,AlejandroHernándezCordero,IñigoMuguruza Goenaga,Irati Zamalloa Ugarte,Lander Usategui Ugarte(Erle Robotics)介绍H-ROS,硬件机器人操作系统H-ROS代表由DARPA资助的项目的硬件机器人操作系统,旨在创建易于重用和可配置的机器人硬件组件,以简化机器人的创建,并允许来自不同制造商的部件以使用ROS 2为核心的基础进行互操作。H-ROS将帮助公司创建机器人组件,以本机方式讲ROS。使用H-ROS,构建机器人是将H-ROS兼容的硬件组件放在一起。处理机器人不会局限于具有高技术能力的几个机器人,而是将其扩展到绝大多数,并且对H-ROS零件类型的不同了解。pdf 视频14:50大家闪电谈话我
视频
1 2 3 4 5 6 7 8 9 10 11 12 13 1415:35大家羽毛我的鸟
16:05大家咖啡休息(和羽毛鸟讨论的延续)
16:35Mirko Bordignon(弗劳恩霍夫IPA),Shaun Edwards(西南研究所),Paul Evans(西南研究所),Clay Flannigan(西南研究所),Gijs van der Hoorn(代尔夫特理工大学),Paul Hvass(西南研究所) Ulrich Reiser(Fraunhofer IPA),Nicolas Yeo(ARTC - A * STAR),Min Ling Chan(ARTC - A * STAR)ROS-Industrial转向四个,并在全球扩张在Shaun Edwards首次推出四年之后,ROS-Industrial目前正在全球范围内努力扩大和改进ROS在制造环境和工业设备中的应用。作为一个举措,它由OEM和系统集成商在财务上得到支持,OEM和系统集成商的利益得到了代表,并且在非营利性应用研究机构管理的三个ROS工业联盟内收集了要求。作为一个软件平台,它是由一个自由和开放的社区聚会开发的,每月会议并通过联合开发模式运作,就像ROS开发者社区一样。这次演讲将展示现实世界的例子,目前正在努力扩大主动性,并继续解决技术和非技术问题。pdf 视频16:55利维·阿姆斯壮(西南研究所)ROS Qt创建者项目经理插件ROS Qt Creator插件专为ROS开发,通过简化任务并为ROS工具创建集中式位置来提高开发人员的效率。由于它建立在Qt Creator平台之上,用户可以访问其所有现有功能,如:语法高亮,编辑器(C ++,Python等),代码完成,版本控制(Git,Subversion等)调试器(GDB,CDB,LLDB等)等等。讲话将涵盖:描述和动机; 概述当前和未来的特点; 以及如何使用插件来管理ROS Workspace的示例。pdf 视频17:15Trygve Thomessen,Laszlo Nagy(PPM AS)直观的ROS UI:FlexGui 4.0 - 介绍和工业应用FlexGui 4.0基于流行的Web技术:HTML5,CSS和JavaScript。通过这种方式,可以在PC,Android,iPhone,Windows Phone上运行FlexGUI 4.0,并且通常使用现代浏览器在每个设备上运行FlexGUI 4.0,您将可以在每个设备上使用完全相同的用户体验。FlexGui 4.0使用ROS进行通信,我们选择了工业4.0,IoT的中间件。加入会议,让我们介绍一下自己,看看我们的一些工业应用,问我们如何帮助你们!pdf 视频17:35保罗·赫瓦斯,肖恩·爱德华兹(西南研究所)ROS-'X' - 重点举措你听说过“ROS-I”还是“ROS-M”项目?别人怎么样?随着ROS在各个商业市场的接受,ROS-'X'项目似乎围绕着它们组织。这些市场包括工业,军事,农业,空中和汽车。将介绍一些比其他工作更成熟的工作的概述。将讨论这些项目形成的各种原因以及对更广泛的ROS社区的影响。专门的ROS-'X项目具有巨大的潜力,但这些项目也有很大的责任,确保更广泛的ROS项目继续下去,得到很好的支持。pdf 视频18:00大家前台
20:00
鳍
第二天,10月9日
(跳到第1天)
9:00PéterFankhauser(苏黎世苏黎世),Christian Gehring(ETH苏黎世),Remo Diethelm(苏黎世苏黎世),Samuel Bachmann(ETH苏黎世),Dario Bellicoso(ETH苏黎世),Martin Wermelinger(ETH苏黎世),Vasilios Tsounis(ETH苏黎世),Michael布鲁斯(苏黎世苏黎世),菲利浦·莱曼(苏黎世苏黎世),加布里埃尔·热蒂格(苏黎世苏黎世),安德烈亚斯·劳贝(苏黎世苏黎世),多米尼克·琼(苏黎世苏黎世),瑞士研究苏黎世Ralf Kaestner,马克·霍普弗(苏黎世苏黎世)ARGOS挑战中的最佳挑战:带有腿式机器人的油气站点自动检测的工具和经验在ARGOS挑战赛中,我们与我们的腿式机器人ANYmal一起参与石油和天然气现场的自主检测。在本演讲中,我们分享了我们在工作中使用ROS的经验,并介绍了我们的工具,其中许多都是开源的。ANYmal是一种电动四足机器人,能够动态运行,爬过障碍物和缩放楼梯。它使用机载激光测距传感器来精确定位和映射其周围环境,从而在困难的环境中实现自主导航。对于ARGOS,ANYmal携带多个检测传感器,并使用计算机视觉来监控现场状态。pdf 视频9:40德克托马斯(OSRF)ROS构建农场 - 它可以为我做什么演示文稿专注于Python包ros_buildfarm。所提供的各种功能将被详细描述,这将提高对ROS包的开发过程的理解,从发布过程到文档的持续集成。它将帮助您利用提供的build.ros.org基础架构来开发您的ROS软件包,并改进您的工作流程。此外,它正在演示如何在本地应用软件,或通过Travis来运行自己的“工作”。pdf 视频10:20Mike Purvis(Clearpath Robotics)使用ROS捆绑软件进行强大的部署在2015年年底,Clearpath正面临部署危机,各州的软件都会进行客户网站,场外演示,内部演示和测试以及开发人员工作站。现有工具中存在文化问题和技术限制。所有这些问题的解决方案是在单个大型工作区(使用catkin_tools)中构建整个机器人的软件,然后将整个事物作为一个“胖”的deb包装。将介绍经验教训以及为Ubuntu构建一个定制的desktop_full软件包的简单示例 - 这应该足以启动任何其他想要设置类似构建的人的工作。这次示范将特别突出我们在上述开发工作中对上游ROS工具的贡献,pdf 视频10:40大家咖啡时间(休闲时光
11:10陈妍(OSRF)多云有机会的模拟DARPA虚拟机器人挑战赛诞生了第一个版本的CloudSim。它提供了一个集中的平台,帮助世界各地的参与者团队同时进行模拟竞争。此后,各种项目都要求为机器人竞赛提供类似的云托管环境。在本演示中,我们揭示了一种新的重新设计的CloudSim,旨在成为在云上运行机器人软件和仿真的通用工具。我们介绍其一些主要功能,包括仿真实例共享,可重用的前端Web组件,WebGL可视化客户端以及安全和身份验证。pdf 视频11:30里卡多·特利兹(The Construct)机器人基准测试与ROS机器人技术的基准测试是一个未解决的问题。拥有机器人的基准系统将加快机器人和研究的发展,因为结果可能会在相同的条件下相互比较,新的机器人作品可能最终建立在以前的结果基础之上。本课程的目的是描述基于Gazebo模拟的机器人通用基准测试系统的框架,其中ROS具有成为硬件和软件之间通信标准的核心作用。视频11:50Alex Henning(Fetch Robotics)物理连续集成 - 真实机器人上的CI!Fetch Robotics开发了一个连续集成(CI)系统,用于在包括多个真实机器人的完整系统中测试新代码。多个天花板摄像机和onrobot rosbag录音允许开发人员在发现时挖掘和诊断错误。这个演讲将介绍我们用来部署和监视我们的机器人队的测试的工具和方法。它还将涵盖运行现实世界测试所需的其他注意事项,并包括使用物理连续集成来验证ROS导航堆栈的错误修复的案例研究。pdf 视频12:10大家午餐
13:40Ruffin White(加州大学圣地亚哥分校),Morgan Quigley(OSRF){,S} ROS:通过线,图形和内核保护ROS这个演讲将展示SROS的用途,SROS是ROS API和生态系统的一个新增功能,用于支持现代密码学和安全措施。在详细介绍当前进展情况和进一步建议的同时,将展示每个重大进展的工作示范,包括:所有消息,服务和参数传输的超线密码,命名空间访问控制实施图策略/限制,最后使用Linux安全模块处理配置文件在主机上硬化节点的文件,设备,信号和网络访问。您将更加了解ROS中的漏洞和持续发展,以确保未来的机器人子系统。pdf 视频14:00AdamDąbrowski,RafałKozik,Mateusz Macias(PIAP)评估ROS2通信层的弹性ROS2发展的主要原因之一是通信层向DDS的迁移。到目前为止,世界各地的机器人用户,至今不满ROS的缺点,终于可以考虑加入社区了。对于所有看到承诺的人来说,有一个ROS2是否会实现的问题。我们在不完善的网络中引入了可测量,可重复的ROS2通信评估项目。我们将介绍评估工具的最新成果,得出结论:已经取得了什么成果?最重要的差距是什么?pdf 视频14:20Jan Carstensen,Axel Rauschenberger(莱布尼茨大学汉诺威)RTROS - 机器人操作系统的实时扩展RTROS使ROS用户能够轻松地从ROS生态系统中获取RUS节点的许多优点,同时满足硬实时约束。测试Xenomai和抢先-RT库提供确定性的通信和核心功能来开发实时机器人系统。RTROS的设计使得独立的RTROS或ROS / RTROS系统成为可能。因此,对于非关键节点使用标准ROS节点仍然是可能的。pdf 视频14:40大家闪电会谈II
影片
1 2 3 4 5 6 7 8 9 10 11 12 13 14 1515:25大家羽毛之鸟II
15:55大家咖啡休息(和羽毛鸟讨论的延续)
16:25Dejan Pangercic,David Ball,Markus Hoeferlin,Daniel Di Marco,Steffen Fuchs,Tobias Mugele,Tobias Dipper,Gabriel Gaessler,Andreas Michaels,Sandeep Bairampalli,Maurice Gohlke,Roland-Kosta Tschakarow,Amos Albert(Deepfield Robotics)博世ROS的农业机器人:从田间的互联网到植物的互联网博世启动深田机器人公司正在创建自动化植物表型的创新系统。我们的系统包括用于数据采集的半自动机器人和用于植物检测和分析的处理管线。我们的系统广泛地基于ROS。本讲座将详细介绍我们的完整系统,重点介绍我们的表型工厂计数管道,机器人的软件和实时设计,ROS框架文件管理,生命周期管理,构建服务器场,ROS框架中的配置的最佳实践。其他初创公司将会使用ROS和其他希望提高其质量水平的团体来感受此次演讲。到目前为止,我们已经处理了27 TB的数据,并且在多天内检测到超过200万个工厂。pdf 视频16:45Dejan Pangercic(Deepfield Robotics),Daniel Di Marco(Deepfield Robotics),Florian Friesdorf(Ternaris UG),Marko Durkovic(Ternaris UG)Bagbunker - 用于大数据存储,分析,查看和测试的工具管理大型数据集对于机器人专家来说是一项具有挑战性但常常被忽视的任务,特别是在户外应用中,如农业,水下和空间机器人以及自主驾驶。我们已经发布了bagbunker,一个基于Web的工具,用于存储,管理和检索大型数据集,如rosbags。Bagbunker就像一个照片应用程序,只是一个不同的数据。它专门用于改进管理大型数据集的任务,也是未经数据库系统培训的工程师。这样,通过将数据保持在中央控制之下,大大加快了开发和调试的速度,并提供了一个基于Web的界面来过滤,检查,可视化和与数据交互。在此次会议中,参与者将学习如何有效地管理大型数据集,包括如何搜索和检索rosbags以及如何编写作业来分析rosbags。此外,我们还将介绍如何使用bagbunker进行图像分类回归测试。pdf 视频17:05李李彦(DJI)ROS开发者强大的飞行平台演示介绍了一个准确,稳定和可靠的飞行平台DJI Matrice 100及其相应的ROS包到航空机器人开发人员。开发人员可以借助于板载SDK ROS软件包来监控和控制飞机的飞行行为,同时利用内置的智能导航模式创建自主的飞行路径和机动。它的ROS包功能强大而易于使用,这有助于许多Matrice 100开发人员在研发过程中获得巨大成就。pdf 视频17:25Ryan Gariepy结束语
pdf 视频17:35
鳍
征集建议书
提案截止日期:2016年7月11日
邀请与ROS有关的所有主题的演讲和教程。示例包括将与会者介绍给ROS包或图书馆,探索如何使用工具,操纵传感器数据和机器人的应用程序。
鼓励妇女,少数群体成员和其他代表性不足的群体成员向ROSCon提交提交建议。
提案将由计划委员会进行审查,以评估适合性,影响力和平衡性。
我们不能提供不提议的会话!如果有一个话题要提交,请提出。如果您有一个重要主题,您不想表达自己的想法,请发布到ros-users@lists.ros.org。
主题区域
所有与ROS相关的工作都被邀请。感兴趣的主题包括:
最佳做法有用的包
机器人特定开发
ROS增强建议(REP)
安全防范
嵌入式系统中的ROS
产品开发与商业化
研究与教育
企业部署
社区组织和方向
测试,质量和文档
机器人比赛和合作
要了解ROSCon的内容和语调,请查看前几年的幻灯片和视频。
会议提案应包括:
标题主持人(姓名和职务)
推荐持续时间:短(约20分钟)或长(〜45分钟)
总结,100字最大(用于广告会话)
描述(用于评论):大纲,目标(观众将学到什么?),要讨论的包的指针(500字最大)
更多信息
组织委员会
Tully Foote罗伯特·弗里德曼
Ryan Gariepy
Brian Gerkey
丹尼尔·斯通尼
计划委员会
Tully FooteRyan Gariepy
Brian Gerkey
伊恩·麦克马洪
汤姆·摩尔
丹尼尔·斯通尼
Melonee智者
多元化主席
迪安娜·胡德ROSCon 2016多元化奖学金
ROSCon 2016组委会旨在为ROSCon代表整个ROS社区,这是多样化和全球性的。除了促进开源的技术之外,我们还努力确保我们的社区本身尽可能开放和便利,因为我们认识到多样性有利于整个ROS生态系统。
无论你是谁,无论你做什么,无论你做什么,如果你对ROS感兴趣,那么我们希望你在ROSCon加入我们。为了减少出席会议的财务障碍,ROSCon组委会向技术界传统的代表性不足群体的成员提供了一些奖学金。有关更多信息,请参阅ROS博客上的公告。
过去的事
ROSCon自2012年以来每年举行一次。如果您想了解更多信息,我们将会对所有过去的节目进行录像,并录制会议记录和大部分幻灯片。这些网站可以在下面的位置找到。
ROSCon 2015汉堡,德国ROSCon 2014芝加哥,美国
ROSCon 2013斯图加特,德国
ROSCon 2012圣保罗,美国
行为守则
为了确保每个人都有安全的环境,我们期望所有参与者遵循会议的行为守则。
社交媒体
#ROSCon2016 #ROSCon @osrfoundation @rosorg
----2015----

注册
在ROSCon的第一个,我们卖完了! 由于场地的容量限制,我们将无法容纳更多与会者。我们不会提供现场注册。
直播

我们将在线免费播放ROSCon演示文稿:
如果你想在网上讨论一下,我们将在活动中尝试监控一个Slack频道。如果你没有一个rosorg Slack帐户,你可以在这里注册 ,如果你正在使用社交媒体,请使用#ROSCon2015。
高通公司的朋友慷慨赞助,我们能够向社区提供这种利益。所以如果你不能在汉堡加入我们,你可以在线跟随。我们也将一如既往地记录演示文稿并发布。
ROSCon 2015
ROSCon 2015是ROS开发人员的机会,从初学者到专家,花了两天的时间学习和与ROS社区联网。从专家处获取技巧和技巧,并与来自全球各地的同行开发人员会面并分享想法。
ROSCon是一个开发者大会,在PyCon和BoostCon的模型中。继德国明尼苏达州圣保罗的首个ROSCon成功举办以来,德国斯图加特的第二个版本是去年在伊利诺伊州芝加哥举办的活动,今年的ROSCon将在德国汉堡举行。与前几年类似,为期两天的课程将包括技术讲座和教程,向您介绍新的工具和图书馆,并教你们更多的知识。大部分节目将有30-40分钟的演讲(有些可能会更长或更短)。要提交投标书,请参阅征集投标书。
如果您不想正式演示,您应该将您的新项目或想法带给ROSCon!将举行闪电会议,这是5分钟的小型会议,按时在会议中安排。还将有一个开放空间的鸟类(BoF)会议,即席黑客会议和非正式的演讲。
如果您正在寻找有关过去ROSCons的信息,请查看他们的独立网站,包括过去的节目,演示文稿的幻灯片和视频可从他们的计划获得:ROSCon 2012计划,ROSCon 2013计划和ROSCon 2014计划。
随着更多的信息可用,今年的计划将在这里填写。
日期
ROSCon 2015要注意的重要日期。
征集投标书
2015年5月15日
提案截止日期
2015年7月7日
提案验收通知
2015年7月14日
提早注册截止日期
2015年8月31日
ROSCon 2015在汉堡德国
2015年10月3日至4日
赞助商
没有得到我们赞助商的慷慨支持,我们就无法穿上ROSCon。如果您想了解更多关于他们的信息,请在活动中找到他们。
白金赞助
黄金赞助商








银赞助

如果您有兴趣了解赞助ROSCon的更多信息,请联系组委会。或查看我们的发起人招股说明书。
位置
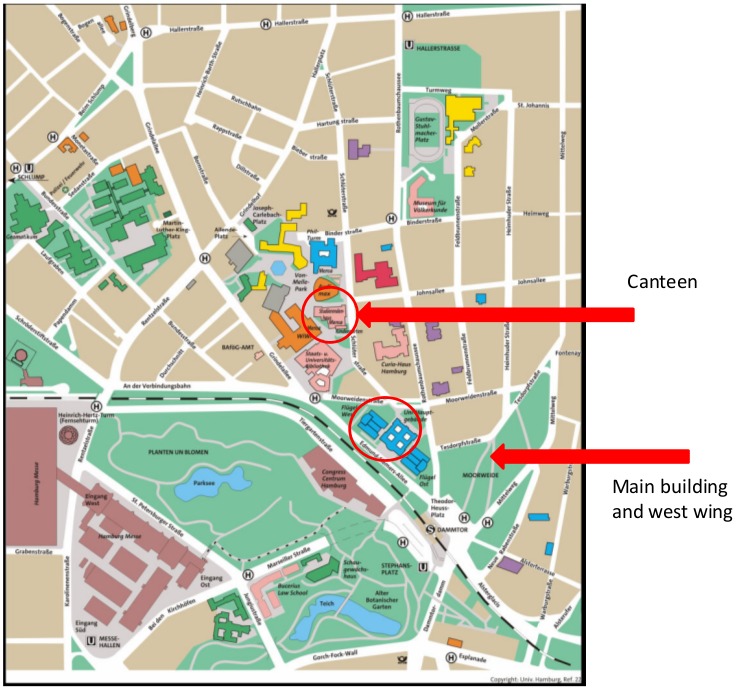
ROSCon将在汉堡大学举行。
<iframe src="https://www.google.com/maps/embed?pb=!1m18!1m12!1m3!1d9476.763006616144!2d9.981594468401857!3d53.572212163396465!2m3!1f0!2f0!3f0!3m2!1i1024!2i768!4f13.1!3m3!1m2!1s0x47b1f2eedd2e8b1f%3A0x5c362839af439375!2sUniversity+of+Hamburg!5e0!3m2!1sen!2sus!4v1430784562880" width="600" height="450" frameborder="0" style="box-sizing: inherit; margin: 0px; padding: 0px; border-width: 0px; border-style: initial; font-style: inherit; font-variant: inherit; font-weight: inherit; font-stretch: inherit;font-size:undefined; line-height: inherit; font-family: inherit; vertical-align: baseline;"></iframe>主要活动和午餐的建筑物可以在下面的地图中找到。
附近酒店
在您可能会留下的场地附近有很多选择。这里是几个附近的链接。
酒店
Hotel Am Dammtor汉堡酒店Schlüterstraße220146汉堡
德国德国大剧院Rothenbaumchaussee 10
20148汉堡
德国汉堡Radisson BluMarseiller大街2
20355汉堡
德国
精品/ B&B风格
汉堡汉堡酒店Schäferkampsallee4920357汉堡
德国Yo Ho青年酒店Moorkamp 5
20357汉堡
德国酒店Heimhude HamburgHeimhuderStraße16
20148汉堡
德国酒店am博物馆Rothenbaumchaussee 71
20148汉堡
德国弗雷西纳酒店Moorweidenstraße34
20146汉堡
德国
签证邀请函
如果您需要会议组织者的邀请获得签证进入德国,请将您的请求电邮至组委会。请填写您的全名和邮寄地址(包括在信件中;我们将通过电子邮件向您发送签名的信件)。
程序
ROSCon 2015计划现已推出!
ROSCon 2015将是一场单轨赛。经计划委员会审查和讨论后,下列21次演示文稿已从70份提交(30%接受率)中被接受。还将举行闪电会议和一次羽毛会议,以及与其他社区成员非正式交谈的许多机会。
第1天,10月3日
1110加里·塞尔文(Creativa77)ROS android_ndk:什么?为什么?怎么样?pdf 视频1130罗伦斯·梅耶(苏黎世苏黎世和PX4),罗马Bapst(苏黎世苏黎世和PX4)ROS on DroneCode系统视频1150摩根奎格利(OSRF)ROS 2在“小”嵌入式系统上pdf 视频1210大家午餐
1340Ruffin White(佐治亚理工学院机器人与智能机器研究所)ROS + Docker:通过Linux Containers启用可重复,可复制和可部署的机器人软件pdf 视频1400Dejan Pangercic(Robert Bosch),Daniel Di Marco(Robert Bosch),Arne Hamann(Robert Bosch)基于Docker的ROS构建场pdf 视频1420Ralph Seulin(CNRS - Bourgogne Franche-Comte大学),Raphael Duverne(CNRS - Bourgogne Franche-Comte大学),Olivier Morel(CNRS - Bourgogne Franche-Comte大学),et al。ROS用于教育和应用研究:实践经验pdf 视频1440大家闪电谈话我视频1520大家羽毛之鸟我
1600大家咖啡时间(休闲时光
1630Dirk Thomas(OSRF),Esteve Fernandez(OSRF),William Woodall(OSRF)ROS 2状态 - 演示和技术背后pdf 视频1715Jackie Kay(OSRF),AdolfoRodríguezTsouroukdissian(PAL机器人)ROS 2中的实时性能pdf 视频1800大家前台
2000
鳍
第2天,10月4日
1100凯文·斯卡德科夫斯基(不来梅大学)Phobos - 类固醇的机器人模型开发pdf 视频1120Shaun Edwards(SwRI),Jorge Nicho(SwRI),Jonathan Meyer(SwRI)笛卡尔半规约笛卡尔轨迹规划图书馆pdf 视频1140Amit Moran(Intel),Gila Kamhi(Intel)引入ROS-RealSense:3D赋权机器人创新平台pdf 视频1200大家午餐
1330BMW Aeberhard(宝马集团研究与技术),ThomasKühbeck(宝马集团研究与技术),Bernhard Seidl(宝马集团研究与技术)等。宝马自动驾驶ROSpdf 视频1350Jerry Towler(SwRI),Marc Alban(SwRI)Mapviz:用于自动车辆的可扩展二维可视化工具pdf 视频1410Matt Vollrath(终点),Wojciech Ziniewicz(终点)ROS驱动的用户应用程序在幂等环境中pdf 视频1430大家闪电会谈II视频1510大家羽毛之鸟II
1550大家咖啡时间(休闲时光
1620汤姆·摩尔(Clearath Robotics)使用robot_localization包pptx pdf 视频1640Moritz Tenorth(Magazino GmbH),Ulrich Klank(Magazino GmbH),Nikolas Engelhard(Magazino GmbH)Maru和Toru:基于ROS的特定物流解决方案pdf 视频1700迈克尔·弗格森(Fetch Robotics)加速您的机器人启动与ROS视频1720Ryan Gariepy结束语视频1730
鳍
征集建议书
提案截止日期:2015年7月7日
邀请与ROS有关的所有主题的演讲和教程。示例包括将与会者介绍给ROS包或图书馆,探索如何使用工具,操纵传感器数据和机器人的应用程序。
提案将由计划委员会进行审查,以评估适合性,影响力和平衡性。
我们不能提供不提议的会话!如果有一个话题要提交,请提出。如果您有一个重要主题,您不想表达自己的想法,请发布到ros-users@lists.ros.org。
主题区域
所有与ROS相关的工作都被邀请。感兴趣的主题包括:
最佳做法有用的软件包和堆栈
机器人特定开发
ROS增强建议(REP)
安全防范
嵌入式系统中的ROS
产品开发与商业化
研究与教育
企业部署
社区组织和方向
测试,质量和文档
机器人比赛和合作
提案提交
会议提案应包括:
标题推荐持续时间:短(约20分钟)或长(〜45分钟)
总结,100字最大(用于广告会话)
描述(用于评论):大纲,目标(观众将学到什么?),要讨论的包的指针(500字最大)
更多信息
组织委员会
Tully FooteRyan Gariepy
Brian Gerkey
塞巴斯蒂安·洛克勒
过去的事
ROSCon自2012年以来每年举行一次。如果您想了解更多信息,我们将会对所有过去的节目进行录像,并录制会议记录和大部分幻灯片。这些网站可以在下面的位置找到。
ROSCon 2014芝加哥,美国ROSCon 2013斯图加特,德国
ROSCon 2012圣保罗,美国
行为守则
为了确保每个人都有安全的环境,我们期望所有参与者遵守会议的行为守则。
社交媒体
----2014----
ROSCON 2014
2014年4月30日更新: ROSCon 2015已经公布在德国汉堡10月3日和4日,紧随IROS。更多信息将在roscon.ros.org上公布。
更新2014年9月24日:演示文稿的幻灯片和视频已经从程序发布和链接。
ROSCon 2014
Palmer House
芝加哥,伊利诺伊州
2014年9月12日至13日
(紧随 IMTS和IROS之前 )
ROSCon 2014是ROS开发人员的一个机会,从初学者到专家,花了两天的时间学习和与ROS社区联网。从专家处获取技巧和技巧,并与来自全球各地的同行开发人员会面并分享想法。
ROSCon是一个开发者大会,在PyCon和BoostCon的模型中。继成功在明尼苏达州圣保罗市首届ROSCon和去年在德国斯图加特的事件,今年的ROSCon将在伊利诺伊州芝加哥市举行。与前几年类似,为期两天的课程将包括技术讲座和教程,向您介绍新的工具和图书馆,并教你们更多的知识。大部分节目将有30-40分钟的演讲(有些可能会更长或更短)。要提交投标书,请参阅征集投标书。
如果您不想正式演示,您应该将您的新项目或想法带给ROSCon!将举行闪电会议,这是5分钟的小型会议,按时在会议中安排。还将有一个开放空间的鸟类(BoF)会议,即席黑客会议和非正式的演讲。
如果您正在寻找有关过去ROSCons的信息,请参阅他们的独立网站,包括过去的节目,幻灯片和视频的演示文稿:ROSCon 2012 和 ROSCon 2013
您可以通过roscon-2014-oc@osrfoundation.org联系组委会
更多信息,包括场地详情,将尽快发布。
如果您有兴趣赞助活动,请联系组委会。
活动报名现已开放。
----2013----
ROSCon 2013
更新2013年6月4日:与演讲者幻灯片和视频的链接已添加到程序页面。
更新2013年4月15日:该计划已更新。
更新2013年3月3日:该程序已发布,注册开放!提前报名截止日期为2013年3月31日。
德国斯图加特
2013年5月11日至12日
(紧随ICRA)
ROSCon 2013是ROS开发人员的机会,从初级专家到ROS社区花费非凡的周末学习和联网。从专家处获取技巧和技巧,并与来自全球各地的同行开发人员会面并分享想法。
ROSCon是PyCon和BoostCon的开发者大会。继ROSCon在明尼苏达州圣保罗(http://roscon.ros.org/2012)成立之后,今年的ROSCon将在德国举行。与去年类似,为期两天的课程将包括技术讲座和教程,向您介绍新的工具和图书馆,并教您更多了解您已经知道的工具和图书馆。大部分节目将有30-40分钟的演讲(有些可能会更长或更短)。
如果您不想正式演示,您应该将您的新项目或想法带给ROSCon!
将举行闪电会议,这是5分钟的小型会议,按时在会议中安排。还将有一个开放空间的鸟类(BoF)会议,即席黑客会议和非正式的演讲。
----2012----
更新2012年5月30日:所有会话的视频已经发布,从程序页面链接。
圣保罗明尼苏达州
2012年5月19日至20日
(紧随ICRA)
ROSCon 2012是ROS开发人员的机会,从初学者到专家,花费非凡的周末学习和与ROS社区的联网。从专家,网络获取技巧和技巧,并与全球各地的开发人员分享想法。
ROSCon是PyCon和BoostCon的开发者大会。为期两天的课程将包括技术讲座和教程,向您介绍新的工具和图书馆,并教你们更多了解已经知道的工具。大部分节目将是30-40分钟的演讲(有些可能会更长或更短)。
注册开放!
该程序已启动。
如果您不想正式演示,您应该将您的新项目或想法带给ROSCon!
将举行闪电会议,这是5分钟的小型会议,按时在会议中安排。还将有一个开放空间的鸟类(BoF)会议,即席黑客会议和非正式的演讲。
----End----
- ROS会议 ROSCon 2017
- ROSCon 2016会议PPT和视频链接
- ROSCon
- ROSCon 2017通知 Announcing ROSCon 2017: September 21st and 22nd in Vancouver
- ROSCon 2016视频和幻灯片发布 ROS机器人操作系统重要参考资料
- 2017-2018 IEEE会议
- 会议
- 会议
- 会议
- 会议
- 会议
- 会议
- 会议
- ROS
- ros
- Ros
- ROS
- ros
- 初学opencv/形态学拐角检测
- Android中SparseArray解析
- Web移动端Fixed布局的解决方案
- 【运维平台系列】关于弹性扩缩容操作的细节
- C++ String 简单总结
- ROS会议 ROSCon 2017
- CSS3动画特效
- synchronize用法
- zookeeper的linux安装
- libevent学习笔记
- Uncaught TypeError: Cannot assign to read only property 'exports' of object '#<Object>'
- C++ primer阅读笔记----------表达式
- Oracle 遭遇ORA-02064 :不支持分布式操作 解决
- 【去哪儿】寻找Coder


