Turtlebot入门-测试Kinect
来源:互联网 发布:js统计当前用户在线数 编辑:程序博客网 时间:2024/05/21 20:29
Turtlebot入门-测试Kinect
测试Kinect或asus_xtion_pro
注意:
- kinect,请安装freenect替代openni
安装openni和freenect驱动
- 安装驱动
$ sudo apt-get install ros-indigo-openni-* ros-indigo-openni2-* ros-indigo-freenect-*$ rospack profile设置环境变量
- 做任何事情之前,检查turtlebot默认的3D传感器的环境变量和确定输出(仅在TUrtlebot上网本操作)
echo $TURTLEBOT_3D_SENSOR#Output: kinect- 如果你看到一个3D传感器,例如asus_xtion_pro,您将需要设置环境变量的默认值,修改和重新启动终端:
echo "export TURTLEBOT_3D_SENSOR=kinect" >> .bashrc- 如果是asus_xtion_pro相机,设置为asus_xtion_pro。
启动相机
- 在Turtlebot终端执行:
roslaunch turtlebot_bringup minimal.launch- 在Turtlebot终端,新开终端,输入
roslaunch freenect_launch freenect.launch
测试相机
- 图像,在工作站打开终端执行:
- 命令:
$ rosrun image_view image_view image:=/camera/rgb/image_color效果:

按“Q”退出深度图像。
- 深度图,在工作站打开终端执行:
- 命令:
$ rosrun image_view image_view image:=/camera/depth_registered/image- 效果:
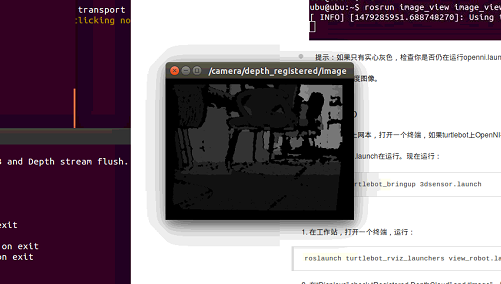
提示:如果只有实心灰色,检查你是否仍在运行openni.launch turtlebot。
按“Q”退出深度图像。
在RVIZ上查看相机
Turtlebot(上网本)
在Turtlebot上网本,打开一个终端,如果turtlebot上OpenNI在运行。按CTRL+C停止它。
保持minimal.launch在运行。现在运行:
roslaunch turtlebot_bringup 3dsensor.launchRViz (工作站)
- 在工作站,打开一个终端,运行:
roslaunch turtlebot_rviz_launchers view_robot.launch- 在“Displays” check “Registered DepthCloud” and “Image”。按住鼠标左键旋转或鼠标中键移动相机。
注意:如果您没有看到显示面板,请将鼠标滚动到屏幕的顶部,然后单击“面板”。检查“显示面板”旁边的复选框,使其启动。
问题及解决
- 出现问题:
[INFO][#]: No devices connected.... waiting for devices to be connected这可能是应为Kinect驱动没安装,参考:
http://wiki.ros.org/turtlebot/Tutorials/indigo/Turtlebot%20Installation
http://wiki.ros.org/turtlebot/Tutorials/indigo/Alternative%203D%20Sensor%20Setup
- 出现问题:
terminate called after throwing an instance of 'openni_wrapper::OpenNIException'或者Image: PrimeSense/SensorV2/5.1.2.1: Failed to set USB interface!这些都是因为Kinect不兼容USB 3,插入一个USB 2端口。(问题也可能是兼容USB3的USB 2端口)。
- 出问题:Kinect的USB链接自动掉线
在GNU / Linux系统,具体的功率设置可能断开Kinect的USB连接。为了防止这种情况,运行这个命令,在重插kinect:
sudo bash -c 'echo -1 > /sys/module/usbcore/parameters/autosuspend'仍有问题检查USB kinect是否运行
lsusb参考:
- 3D Visualization
- Follower Demo - Have TurtleBot follow you around.
使用平台
- ubuntu 14.04
- ros indigo
安装步骤
- sudo apt-get install libfreenect-dev
- sudo apt-get install ros-indigo-freenect-launch
测试部分
运行kinect
roslaunch freenect_launch freenect.launch运行image_view
rosrun rqt_image_view rqt_image_view如果想用openni_launch,有时会因为驱动的问题而出现bug,显示No device connect…的情况,此时需要按照以下网站的步骤操作,安装驱动等
http://answers.ros.org/question/60562/ubuntu-12042-and-openni_launch-not-detecting-kinect-after-update/
显示图像
显示原图
rosrun image_view image_view image:=/camera/rgb/image_color显示视差图
rosrun image_view disparity_view image:=/camera/depth/disparity- 使用技巧前面的参数按
tab键就可以出来,后面的image:=等部分,需要填写当前的topics,而关于当前topics列表的查询可以通过rostopics list实现。
其他ros常用指令
查看topic的类型
rostopic type yourspecifiedtype比如若在运行openni_launch,则
rostopic type /camera/rgb/image_color会返回
sensor_msgs/Image的数据类型显示topic的值
rostopic echo /camera/rgb/image_colortopic有值时会显示
显示msg的类型
rosmsg Num显示srv的类型:表示输入数据类型和输出数据类型的一类文件
rossrv AddTwoInts
- Turtlebot入门-测试Kinect
- TurtleBot+ kinect+ ROS
- TurtleBot机器人入门篇
- turtlebot入门仿真
- Ros中2D_Slam说明: turtlebot+kinect改写成turtlebot+laser(hokuyo)
- Ros中2D_Slam说明: turtlebot+kinect改写成turtlebot+laser(hokuyo)
- ros中2D_Slam说明: turtlebot+kinect改写成turtlebot+laser(hokuyo)
- turtlebot(hydro)学习笔记六:添加多个Kinect
- turtlebot+kinect在rviz上显示3D图像
- turtlebot+kinect在rviz上显示3D图像
- turtlebot--打开3dsensor(kinect xbox)错误记录
- turtlebot
- ROS_用Kinect标定机械臂_Calibrating a Kinect to the TurtleBot Arm for Manipulation
- jetson tk1安装 ros并测试turtlebot
- 使用gazebo实现turtlebot入门级开发
- Kinect安装和测试
- Kinect入门学习视频
- Kinect开发入门
- Swing——外部监听器
- vue编程跳转接口push 转场动画
- 线程安全 可重入函数
- css3:border-radius圆角边框详解
- Hadoop快速入门(1)
- Turtlebot入门-测试Kinect
- 学习c++50条建议
- h5全屏
- SpringMVC
- ajax异步校验用户名
- 论新手在开发项目中需要注意的一些事
- SVN项目提交设置忽略上传资源
- js多张图片循环平移
- L0、L1、L2范数学习笔记


