STM32控制APM飞控(三)MAVLINK整合并适配stm32串口的收发
来源:互联网 发布:哈林导师知乎 编辑:程序博客网 时间:2024/04/27 11:43
转载地址:http://www.cnblogs.com/lovechen/p/6064802.html
stm32底层串口代码更改能收发MAVLINK协议包
一.在上一次移植好的工程基础上进行如下改动
1.将两个文件mavlink_usart_fifo.h mavlink_usart_fifo.c添加到工程里(都是关于缓冲区的底层串口加缓冲区函数)
mavlink_usart_fifo.h文件内容如下
#ifndef _USART_FIFO_H_
#define _USART_FIFO_H_
#include "stdint.h"
#define true 1
#define false 0
typedef struct _fifo {
uint8_t* buf;
uint16_t length;
uint16_t head;
uint16_t tail;
} fifo_t;
uint8_t fifo_read_ch(fifo_t* fifo, uint8_t* ch);
uint8_t fifo_write_ch(fifo_t* fifo, uint8_t ch);
uint16_t fifo_free(fifo_t* fifo);
uint16_t fifo_used(fifo_t* fifo);
void fifo_init(fifo_t* fifo, uint8_t* buf, uint16_t length);
uint8_t serial_write_buf(uint8_t* buf, uint16_t length);
uint8_t serial_read_ch(void);
uint16_t serial_free(void);
uint16_t serial_available(void);
#endif /*_USART_FIFO_H_*/
mavlink_usart_fifo.c文件内容如下
#include "stdint.h"
#define true 1
#define false 0
typedef struct _fifo {
uint8_t* buf;
uint16_t length;
uint16_t head;
uint16_t tail;
} fifo_t;
uint8_t fifo_read_ch(fifo_t* fifo, uint8_t* ch);
uint8_t fifo_write_ch(fifo_t* fifo, uint8_t ch);
uint16_t fifo_free(fifo_t* fifo);
uint16_t fifo_used(fifo_t* fifo);
void fifo_init(fifo_t* fifo, uint8_t* buf, uint16_t length);
uint8_t serial_write_buf(uint8_t* buf, uint16_t length);
uint8_t serial_read_ch(void);
uint16_t serial_free(void);
uint16_t serial_available(void);
#endif /*_USART_FIFO_H_*/
mavlink_usart_fifo.c文件内容如下
#include "sys.h"//作者:恒久力行 qq:624668529
#include "mavlink_usart_fifo.h"
#define UART_TX_BUFFER_SIZE 255
#define UART_RX_BUFFER_SIZE 255
fifo_t uart_rx_fifo, uart_tx_fifo;
uint8_t uart_tx_buf[UART_TX_BUFFER_SIZE], uart_rx_buf[UART_RX_BUFFER_SIZE];
/** @brief 读FIFO
* @param fifo 待读缓冲区
* *ch 读到的数据
* @return
* 正确读取,1; 无数据,0
*/
uint8_t fifo_read_ch(fifo_t* fifo, uint8_t* ch)
{
if(fifo->tail == fifo->head) return false;
*ch = fifo->buf[fifo->tail];
if(++fifo->tail >= fifo->length) fifo->tail = 0;
return true;
}
/** @brief 写一字节数据到FIFO
* @param fifo 待写入缓冲区
* ch 待写入的数据
* @return
* 正确,1; 缓冲区满,0
*/
uint8_t fifo_write_ch(fifo_t* fifo, uint8_t ch)
{
uint16_t h = fifo->head;
if(++h >= fifo->length) h = 0;
if(h == fifo->tail) return false;
fifo->buf[fifo->head] = ch;
fifo->head = h;
return true;
}
/** @brief 返回缓冲区剩余字节长度
* @param fifo
* @return
* 剩余空间
*
* @note 剩余字节长度大于等于2时,才可写入数据
*/
uint16_t fifo_free(fifo_t* fifo)
{
uint16_t free;
if(fifo->head >= fifo->tail) free = fifo->tail + (fifo->length - fifo->head);
else free = fifo->tail - fifo->head;
return free;
}
uint16_t fifo_used(fifo_t* fifo)
{
uint16_t used;
if(fifo->head >= fifo->tail) used = fifo->head - fifo->tail;
else used = fifo->head + (fifo->length - fifo->tail);
return used;
}
/** @brief 初始化缓冲区
* @param *fifo
* *buf
* length
*/
void fifo_init(fifo_t* fifo, uint8_t* buf, uint16_t length)
{
uint16_t i;
fifo->buf = buf;
fifo->length = length;
fifo->head = 0;
fifo->tail = 0;
for(i=0; i<length; i++) fifo->buf[i] = 0;
}
/** @brief 写数据到串口,启动发射
*
* @note 数据写入发射缓冲区后,启动发射中断,在中断程序,数据自动发出
*/
uint8_t serial_write_buf(uint8_t* buf, uint16_t length) {
uint16_t i;
if(length == 0) return false;
for(i = 0; length > 0; length--, i++) {
fifo_write_ch(&uart_tx_fifo, buf[i]);
}
USART_ITConfig(USART1, USART_IT_TXE, ENABLE);
return true;
}
/** @brief 自串口读数据
* @return 一字节数据
*/
uint8_t serial_read_ch(void){
uint8_t ch;
fifo_read_ch(&uart_rx_fifo, &ch);
return ch;
}
/** @breif 检测发射缓冲区剩余字节长度
* @return 剩余字节长度
*/
uint16_t serial_free(void){
return fifo_free(&uart_tx_fifo);
}
uint16_t serial_available(void){
return fifo_used(&uart_rx_fifo);
}
void USART1_IRQHandler(void)
{
uint8_t c;
if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET)//数据接收终端
{
c = USART_ReceiveData(USART1);
fifo_write_ch(&uart_rx_fifo, c);
//USART_ITConfig(USART1, USART_IT_RXNE, DISABLE);
}
if(USART_GetITStatus(USART1, USART_IT_TXE) != RESET)//数据发送中断
{
if(fifo_read_ch(&uart_tx_fifo, &c))
USART_SendData(USART1, c);
else
USART_SendData(USART1, 0x55);
if (fifo_used(&uart_tx_fifo) == 0) // Check if all data is transmitted . if yes disable transmitter UDRE interrupt
{
// Disable the EVAL_COM1 Transmit interrupt
USART_ITConfig(USART1, USART_IT_TXE, DISABLE);
}
}
}
2.usart.c中屏蔽USART1_IRQHandler函数,而正点原子的usart.c全代码为
#include "sys.h"#include "usart.h"////////////////////////////////////////////////////////////////////////////////// //如果使用ucos,则包括下面的头文件即可.#if SYSTEM_SUPPORT_OS#include "includes.h"//ucos 使用 #endif////////////////////////////////////////////////////////////////////////////////// //本程序只供学习使用,未经作者许可,不得用于其它任何用途//ALIENTEK STM32F4探索者开发板//串口1初始化 //正点原子@ALIENTEK//技术论坛:www.openedv.com//修改日期:2014/6/10//版本:V1.5//版权所有,盗版必究。//Copyright(C) 广州市星翼电子科技有限公司 2009-2019//All rights reserved//********************************************************************************//V1.3修改说明 //支持适应不同频率下的串口波特率设置.//加入了对printf的支持//增加了串口接收命令功能.//修正了printf第一个字符丢失的bug//V1.4修改说明//1,修改串口初始化IO的bug//2,修改了USART_RX_STA,使得串口最大接收字节数为2的14次方//3,增加了USART_REC_LEN,用于定义串口最大允许接收的字节数(不大于2的14次方)//4,修改了EN_USART1_RX的使能方式//V1.5修改说明//1,增加了对UCOSII的支持////////////////////////////////////////////////////////////////////////////////// ////////////////////////////////////////////////////////////////////加入以下代码,支持printf函数,而不需要选择use MicroLIB #if 1#pragma import(__use_no_semihosting) //标准库需要的支持函数 struct __FILE { int handle; }; FILE __stdout; //定义_sys_exit()以避免使用半主机模式 _sys_exit(int x) { x = x; } //重定义fputc函数 int fputc(int ch, FILE *f){ while((USART1->SR&0X40)==0);//循环发送,直到发送完毕 USART1->DR = (u8) ch; return ch;}#endif #if EN_USART1_RX //如果使能了接收//串口1中断服务程序//注意,读取USARTx->SR能避免莫名其妙的错误 u8 USART_RX_BUF[USART_REC_LEN]; //接收缓冲,最大USART_REC_LEN个字节.//接收状态//bit15,接收完成标志//bit14,接收到0x0d//bit13~0,接收到的有效字节数目u16 USART_RX_STA=0; //接收状态标记//初始化IO 串口1 //bound:波特率void uart_init(u32 bound){ //GPIO端口设置 GPIO_InitTypeDef GPIO_InitStructure;USART_InitTypeDef USART_InitStructure;NVIC_InitTypeDef NVIC_InitStructure;RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA,ENABLE); //使能GPIOA时钟RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);//使能USART1时钟 //串口1对应引脚复用映射GPIO_PinAFConfig(GPIOA,GPIO_PinSource9,GPIO_AF_USART1); //GPIOA9复用为USART1GPIO_PinAFConfig(GPIOA,GPIO_PinSource10,GPIO_AF_USART1); //GPIOA10复用为USART1//USART1端口配置 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9 | GPIO_Pin_10; //GPIOA9与GPIOA10GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;//复用功能GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;//速度50MHzGPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推挽复用输出GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; //上拉GPIO_Init(GPIOA,&GPIO_InitStructure); //初始化PA9,PA10 //USART1 初始化设置USART_InitStructure.USART_BaudRate = bound;//波特率设置USART_InitStructure.USART_WordLength = USART_WordLength_8b;//字长为8位数据格式USART_InitStructure.USART_StopBits = USART_StopBits_1;//一个停止位USART_InitStructure.USART_Parity = USART_Parity_No;//无奇偶校验位USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//无硬件数据流控制USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;//收发模式 USART_Init(USART1, &USART_InitStructure); //初始化串口1 USART_Cmd(USART1, ENABLE); //使能串口1 //USART_ClearFlag(USART1, USART_FLAG_TC);#if EN_USART1_RXUSART_ITConfig(USART1, USART_IT_RXNE, ENABLE);//开启相关中断//Usart1 NVIC 配置 NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;//串口1中断通道NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3;//抢占优先级3NVIC_InitStructure.NVIC_IRQChannelSubPriority =3;//子优先级3NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;//IRQ通道使能NVIC_Init(&NVIC_InitStructure);//根据指定的参数初始化VIC寄存器、#endif}//void USART1_IRQHandler(void) //串口1中断服务程序//{//u8 Res;//#if SYSTEM_SUPPORT_OS //如果SYSTEM_SUPPORT_OS为真,则需要支持OS.//OSIntEnter(); //#endif//if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) //接收中断(接收到的数据必须是0x0d 0x0a结尾)//{//Res =USART_ReceiveData(USART1);//(USART1->DR);//读取接收到的数据////if((USART_RX_STA&0x8000)==0)//接收未完成//{//if(USART_RX_STA&0x4000)//接收到了0x0d//{//if(Res!=0x0a)USART_RX_STA=0;//接收错误,重新开始//else USART_RX_STA|=0x8000;//接收完成了 //}//else //还没收到0X0D//{//if(Res==0x0d)USART_RX_STA|=0x4000;//else//{//USART_RX_BUF[USART_RX_STA&0X3FFF]=Res ;//USART_RX_STA++;//if(USART_RX_STA>(USART_REC_LEN-1))USART_RX_STA=0;//接收数据错误,重新开始接收 //} //}//} // } //#if SYSTEM_SUPPORT_OS //如果SYSTEM_SUPPORT_OS为真,则需要支持OS.//OSIntExit(); //#endif//} #endif
3.添加mavlink_avoid_errors.h里面的代码如下,这个代码是用来避免错误的跟mdk编译器相关的
#ifndef MAVLINK_AVOID_ERRORS_H
#define MAVLINK_AVOID_ERRORS_H
#include "stdio.h"
#include "stdint.h"
/*解决..\MAVLINK\common\../mavlink_types.h(53): error: #20: identifier "pack" is undefined*/
#define MAVPACKED( __Declaration__ ) __Declaration__
/*解决..\MAVLINK\common\../mavlink_types.h(53): error: #3092: anonymous unions are only supported in --gnu mode, or when enabled with #pragma anon_unions*/
#pragma anon_unions
#define inline __inline
//#ifndef memset//由王朔添加 2018-08-24
//void *memset(void *dest, int data, size_t length) {
// uint32_t i;
// int *point = dest;
// for(i=0; i<length; i++) point[i] = data;
// return dest;
//}
//#endif
//#ifndef memcpy//由王朔添加 2018-08-24
//void *memcpy(void *dest, const void *src, size_t n)
//{
// unsigned char *pout = (unsigned char*)dest;
// unsigned char *pin = (unsigned char*)src;
// while (n-- > 0) *pout++ = *pin++;
// return dest;
//}
//#endif
#include "mavlink_types.h"
#define MAVLINK_USE_CONVENIENCE_FUNCTIONS
//#define MAVLINK_SEPARATE_HELPERS
//mavlink_system_t mavlink_system = {0,0};
//mavlink_system_t mavlink_system = {
// 1,
// 1
//}; // System ID, 1-255, Component/Subsystem ID, 1-255
//void comm_send_ch(mavlink_channel_t chan, uint8_t buf)
//{
// chan=chan;
// USART_SendData(USART1, buf); //向串口1发送数据
// while(USART_GetFlagStatus(USART1,USART_FLAG_TC)!=SET);//等待发送结束
//}
#include "mavlink.h"
#include "mavlink_helpers.h"
#endif //AVLINK_AVOID_ERRORS_H
4.添加open_tel_mavlink.h和open_tel_mavlink.c,这两个函数是用来测试mavlink通信的上层代码
open_tel_mavlink.h如下
#define __OPEN_TEL_MAVLINK_H
//#include "./minimal/minimal/minimal.h"
#include "define.h"
#include "mavlink_avoid_errors.h"
#include "stdint.h"
void mavlink_send_message(mavlink_channel_t chan, enum ap_message id, uint16_t packet_drops);
void update(void);
void handleMessage(mavlink_message_t* msg);
#endif /*__OPENTEL_MAVLINK_H*/
open_tel_mavlink.c代码如下:
#include "open_tel_mavlink.h"
////#include "mavlink_usart_fifo.h"
//#include "mavlink_avoid_errors.h"
//#include "mavlink_types.h"
//#include "mavlink_avoid_errors.h"
#include "define.h"
#include "stdint.h"
////Add By BigW
typedef uint8_t bool;
//typedef struct {
// char c;
//} prog_char_t;
//
// This is the state of the flight control system
// There are multiple states defined such as STABILIZE, ACRO,
static int8_t control_mode = STABILIZE;
mavlink_channel_t chan;
//uint16_t packet_drops;
mavlink_heartbeat_t heartbeat;
mavlink_attitude_t attitude;
mavlink_global_position_int_t position;
//mavlink_ahrs_t ahrs;
uint8_t buf[100];
////End Add By BigW
//// -*- tab-width: 4; Mode: C++; c-basic-offset: 4; indent-tabs-mode: nil -*-
// this costs us 51 bytes, but means that low priority
// messages don't block the CPU
static mavlink_statustext_t pending_status;
// true when we have received at least 1 MAVLink packet
static bool mavlink_active;
// check if a message will fit in the payload space available
#define CHECK_PAYLOAD_SIZE(id) if (payload_space < MAVLINK_MSG_ID_ ## id ## _LEN) return false
void handleMessage(mavlink_message_t* msg);
/*
* !!NOTE!!
*
* the use of NOINLINE separate functions for each message type avoids
* a compiler bug in gcc that would cause it to use far more stack
* space than is needed. Without the NOINLINE we use the sum of the
* stack needed for each message type. Please be careful to follow the
* pattern below when adding any new messages
*/
static NOINLINE void send_heartbeat(mavlink_channel_t chan)
{
uint8_t base_mode = MAV_MODE_FLAG_CUSTOM_MODE_ENABLED;
uint8_t system_status = MAV_STATE_ACTIVE;
uint32_t custom_mode = control_mode;
// work out the base_mode. This value is not very useful
// for APM, but we calculate it as best we can so a generic
// MAVLink enabled ground station can work out something about
// what the MAV is up to. The actual bit values are highly
// ambiguous for most of the APM flight modes. In practice, you
// only get useful information from the custom_mode, which maps to
// the APM flight mode and has a well defined meaning in the
// ArduPlane documentation
base_mode = MAV_MODE_FLAG_STABILIZE_ENABLED;
switch (control_mode) {
case AUTO:
case RTL:
case LOITER:
case GUIDED:
case CIRCLE:
base_mode |= MAV_MODE_FLAG_GUIDED_ENABLED;
// note that MAV_MODE_FLAG_AUTO_ENABLED does not match what
// APM does in any mode, as that is defined as "system finds its own goal
// positions", which APM does not currently do
break;
}
// all modes except INITIALISING have some form of manual
// override if stick mixing is enabled
base_mode |= MAV_MODE_FLAG_MANUAL_INPUT_ENABLED;
#if HIL_MODE != HIL_MODE_DISABLED
base_mode |= MAV_MODE_FLAG_HIL_ENABLED;
#endif
// we are armed if we are not initialising
if (0){//motors.armed()) {
base_mode |= MAV_MODE_FLAG_SAFETY_ARMED;
}
// indicate we have set a custom mode
base_mode |= MAV_MODE_FLAG_CUSTOM_MODE_ENABLED;
mavlink_msg_heartbeat_send(
chan,
MAV_TYPE_QUADROTOR,
MAV_AUTOPILOT_ARDUPILOTMEGA,
base_mode,
custom_mode,
system_status);
}
static NOINLINE void send_attitude(mavlink_channel_t chan)
{
mavlink_msg_attitude_send(
chan,
++buf[1],//millis(),
++buf[2],//ahrs.roll,
++buf[3],//ahrs.pitch,
++buf[4],//ahrs.yaw,
++buf[5],//omega.x,
++buf[6],//omega.y,
++buf[7]);//omega.z);
}
static void NOINLINE send_location(mavlink_channel_t chan)
{
//Matrix3f rot = ahrs.get_dcm_matrix(); // neglecting angle of attack for now
mavlink_msg_global_position_int_send(
chan,
1,//millis(),
2,//current_loc.lat, // in 1E7 degrees
3,//current_loc.lng, // in 1E7 degrees
4,//g_gps->altitude * 10, // millimeters above sea level
5,//(current_loc.alt - home.alt) * 10, // millimeters above ground
6,//g_gps->ground_speed * rot.a.x, // X speed cm/s
7,//g_gps->ground_speed * rot.b.x, // Y speed cm/s
8,//g_gps->ground_speed * rot.c.x,
9);//g_gps->ground_course); // course in 1/100 degree
}
//static void NOINLINE send_ahrs(mavlink_channel_t chan)
//{
// //Vector3f omega_I = ahrs.get_gyro_drift();
// mavlink_msg_ahrs_send(
// chan,
// ++buf[8],//omega_I.x,
// ++buf[9],//omega_I.y,
// ++buf[10],//omega_I.z,
// 1,
// 0,
// ++buf[11],//ahrs.get_error_rp(),
// ++buf[12]);//ahrs.get_error_yaw());
//}
static void NOINLINE send_statustext(mavlink_channel_t chan)
{
}
// are we still delaying telemetry to try to avoid Xbee bricking?
static bool telemetry_delayed(mavlink_channel_t chan)
{
return false;
}
// try to send a message, return false if it won't fit in the serial tx buffer
static bool mavlink_try_send_message(mavlink_channel_t chan, enum ap_message id, uint16_t packet_drops)
{
int16_t payload_space = serial_free();
if (telemetry_delayed(chan)) {
return false;
}
switch(id) {
case MSG_HEARTBEAT:
CHECK_PAYLOAD_SIZE(HEARTBEAT);
send_heartbeat(chan);
break;
case MSG_ATTITUDE:
CHECK_PAYLOAD_SIZE(ATTITUDE);
send_attitude(chan);
break;
case MSG_LOCATION:
CHECK_PAYLOAD_SIZE(GLOBAL_POSITION_INT);
send_location(chan);
break;
// case MSG_AHRS:
// CHECK_PAYLOAD_SIZE(AHRS);
// send_ahrs(chan);
// break;
case MSG_STATUSTEXT:
CHECK_PAYLOAD_SIZE(STATUSTEXT);
send_statustext(chan);
break;
default:
break;
}
return true;
}
#define MAX_DEFERRED_MESSAGES MSG_RETRY_DEFERRED
static struct mavlink_queue {
enum ap_message deferred_messages[MAX_DEFERRED_MESSAGES];
uint8_t next_deferred_message;
uint8_t num_deferred_messages;
} mavlink_queue[2];
// send a message using mavlink
void mavlink_send_message(mavlink_channel_t chan, enum ap_message id, uint16_t packet_drops)
{
uint8_t i, nextid;
struct mavlink_queue *q = &mavlink_queue[(uint8_t)chan];
// see if we can send the deferred messages, if any
while (q->num_deferred_messages != 0) {
if (!mavlink_try_send_message(chan,
q->deferred_messages[q->next_deferred_message],
packet_drops)) {
break;
}
q->next_deferred_message++;
if (q->next_deferred_message == MAX_DEFERRED_MESSAGES) {
q->next_deferred_message = 0;
}
q->num_deferred_messages--;
}
if (id == MSG_RETRY_DEFERRED) {
return;
}
// this message id might already be deferred
for (i=0, nextid = q->next_deferred_message; i < q->num_deferred_messages; i++) {
if (q->deferred_messages[nextid] == id) {
// its already deferred, discard
return;
}
nextid++;
if (nextid == MAX_DEFERRED_MESSAGES) {
nextid = 0;
}
}
if (q->num_deferred_messages != 0 ||
!mavlink_try_send_message(chan, id, packet_drops)) {
// can't send it now, so defer it
if (q->num_deferred_messages == MAX_DEFERRED_MESSAGES) {
// the defer buffer is full, discard
return;
}
nextid = q->next_deferred_message + q->num_deferred_messages;
if (nextid >= MAX_DEFERRED_MESSAGES) {
nextid -= MAX_DEFERRED_MESSAGES;
}
q->deferred_messages[nextid] = id;
q->num_deferred_messages++;
}
}
void mavlink_send_text(mavlink_channel_t chan, enum gcs_severity severity, char *str)
{
if (telemetry_delayed(chan)) {
return;
}
if (severity == SEVERITY_LOW) {
// send via the deferred queuing system
pending_status.severity = (uint8_t)severity;
mav_array_memcpy((char *)pending_status.text, str, sizeof(pending_status.text));
mavlink_send_message(chan, MSG_STATUSTEXT, 0);
} else {
// send immediately
mavlink_msg_statustext_send(
chan,
severity,
str);
}
}
void update(void)
{
// receive new packets
mavlink_message_t msg;
mavlink_status_t status;
status.packet_rx_drop_count = 0;
// process received bytes
while(serial_available())
{
uint8_t c = serial_read_ch();
// Try to get a new message
if (mavlink_parse_char(chan, c, &msg, &status)) {
mavlink_active = true;
//printf("%c",c);
printf("Received message with ID %d, sequence: %d from component %d of system %d",\
msg.msgid, msg.seq, msg.compid, msg.sysid);
handleMessage(&msg);
}
}
}
void handleMessage(mavlink_message_t* msg)
{
//struct Location tell_command = {}; // command for telemetry
switch (msg->msgid) {
case MAVLINK_MSG_ID_HEARTBEAT: {
mavlink_msg_heartbeat_decode(msg, &heartbeat);
break;
}
case MAVLINK_MSG_ID_ATTITUDE: {
mavlink_msg_attitude_decode(msg, &attitude);
break;
}
case MAVLINK_MSG_ID_GLOBAL_POSITION_INT: {
mavlink_msg_global_position_int_decode(msg, &position);
break;
}
//
// case MAVLINK_MSG_ID_AHRS: {
// mavlink_msg_ahrs_decode(msg, &ahrs);
// break;
// }
default:
break;
} // end switch
} // end handle mavlink
////#include "mavlink_usart_fifo.h"
//#include "mavlink_avoid_errors.h"
//#include "mavlink_types.h"
//#include "mavlink_avoid_errors.h"
#include "define.h"
#include "stdint.h"
////Add By BigW
typedef uint8_t bool;
//typedef struct {
// char c;
//} prog_char_t;
//
// This is the state of the flight control system
// There are multiple states defined such as STABILIZE, ACRO,
static int8_t control_mode = STABILIZE;
mavlink_channel_t chan;
//uint16_t packet_drops;
mavlink_heartbeat_t heartbeat;
mavlink_attitude_t attitude;
mavlink_global_position_int_t position;
//mavlink_ahrs_t ahrs;
uint8_t buf[100];
////End Add By BigW
//// -*- tab-width: 4; Mode: C++; c-basic-offset: 4; indent-tabs-mode: nil -*-
// this costs us 51 bytes, but means that low priority
// messages don't block the CPU
static mavlink_statustext_t pending_status;
// true when we have received at least 1 MAVLink packet
static bool mavlink_active;
// check if a message will fit in the payload space available
#define CHECK_PAYLOAD_SIZE(id) if (payload_space < MAVLINK_MSG_ID_ ## id ## _LEN) return false
void handleMessage(mavlink_message_t* msg);
/*
* !!NOTE!!
*
* the use of NOINLINE separate functions for each message type avoids
* a compiler bug in gcc that would cause it to use far more stack
* space than is needed. Without the NOINLINE we use the sum of the
* stack needed for each message type. Please be careful to follow the
* pattern below when adding any new messages
*/
static NOINLINE void send_heartbeat(mavlink_channel_t chan)
{
uint8_t base_mode = MAV_MODE_FLAG_CUSTOM_MODE_ENABLED;
uint8_t system_status = MAV_STATE_ACTIVE;
uint32_t custom_mode = control_mode;
// work out the base_mode. This value is not very useful
// for APM, but we calculate it as best we can so a generic
// MAVLink enabled ground station can work out something about
// what the MAV is up to. The actual bit values are highly
// ambiguous for most of the APM flight modes. In practice, you
// only get useful information from the custom_mode, which maps to
// the APM flight mode and has a well defined meaning in the
// ArduPlane documentation
base_mode = MAV_MODE_FLAG_STABILIZE_ENABLED;
switch (control_mode) {
case AUTO:
case RTL:
case LOITER:
case GUIDED:
case CIRCLE:
base_mode |= MAV_MODE_FLAG_GUIDED_ENABLED;
// note that MAV_MODE_FLAG_AUTO_ENABLED does not match what
// APM does in any mode, as that is defined as "system finds its own goal
// positions", which APM does not currently do
break;
}
// all modes except INITIALISING have some form of manual
// override if stick mixing is enabled
base_mode |= MAV_MODE_FLAG_MANUAL_INPUT_ENABLED;
#if HIL_MODE != HIL_MODE_DISABLED
base_mode |= MAV_MODE_FLAG_HIL_ENABLED;
#endif
// we are armed if we are not initialising
if (0){//motors.armed()) {
base_mode |= MAV_MODE_FLAG_SAFETY_ARMED;
}
// indicate we have set a custom mode
base_mode |= MAV_MODE_FLAG_CUSTOM_MODE_ENABLED;
mavlink_msg_heartbeat_send(
chan,
MAV_TYPE_QUADROTOR,
MAV_AUTOPILOT_ARDUPILOTMEGA,
base_mode,
custom_mode,
system_status);
}
static NOINLINE void send_attitude(mavlink_channel_t chan)
{
mavlink_msg_attitude_send(
chan,
++buf[1],//millis(),
++buf[2],//ahrs.roll,
++buf[3],//ahrs.pitch,
++buf[4],//ahrs.yaw,
++buf[5],//omega.x,
++buf[6],//omega.y,
++buf[7]);//omega.z);
}
static void NOINLINE send_location(mavlink_channel_t chan)
{
//Matrix3f rot = ahrs.get_dcm_matrix(); // neglecting angle of attack for now
mavlink_msg_global_position_int_send(
chan,
1,//millis(),
2,//current_loc.lat, // in 1E7 degrees
3,//current_loc.lng, // in 1E7 degrees
4,//g_gps->altitude * 10, // millimeters above sea level
5,//(current_loc.alt - home.alt) * 10, // millimeters above ground
6,//g_gps->ground_speed * rot.a.x, // X speed cm/s
7,//g_gps->ground_speed * rot.b.x, // Y speed cm/s
8,//g_gps->ground_speed * rot.c.x,
9);//g_gps->ground_course); // course in 1/100 degree
}
//static void NOINLINE send_ahrs(mavlink_channel_t chan)
//{
// //Vector3f omega_I = ahrs.get_gyro_drift();
// mavlink_msg_ahrs_send(
// chan,
// ++buf[8],//omega_I.x,
// ++buf[9],//omega_I.y,
// ++buf[10],//omega_I.z,
// 1,
// 0,
// ++buf[11],//ahrs.get_error_rp(),
// ++buf[12]);//ahrs.get_error_yaw());
//}
static void NOINLINE send_statustext(mavlink_channel_t chan)
{
}
// are we still delaying telemetry to try to avoid Xbee bricking?
static bool telemetry_delayed(mavlink_channel_t chan)
{
return false;
}
// try to send a message, return false if it won't fit in the serial tx buffer
static bool mavlink_try_send_message(mavlink_channel_t chan, enum ap_message id, uint16_t packet_drops)
{
int16_t payload_space = serial_free();
if (telemetry_delayed(chan)) {
return false;
}
switch(id) {
case MSG_HEARTBEAT:
CHECK_PAYLOAD_SIZE(HEARTBEAT);
send_heartbeat(chan);
break;
case MSG_ATTITUDE:
CHECK_PAYLOAD_SIZE(ATTITUDE);
send_attitude(chan);
break;
case MSG_LOCATION:
CHECK_PAYLOAD_SIZE(GLOBAL_POSITION_INT);
send_location(chan);
break;
// case MSG_AHRS:
// CHECK_PAYLOAD_SIZE(AHRS);
// send_ahrs(chan);
// break;
case MSG_STATUSTEXT:
CHECK_PAYLOAD_SIZE(STATUSTEXT);
send_statustext(chan);
break;
default:
break;
}
return true;
}
#define MAX_DEFERRED_MESSAGES MSG_RETRY_DEFERRED
static struct mavlink_queue {
enum ap_message deferred_messages[MAX_DEFERRED_MESSAGES];
uint8_t next_deferred_message;
uint8_t num_deferred_messages;
} mavlink_queue[2];
// send a message using mavlink
void mavlink_send_message(mavlink_channel_t chan, enum ap_message id, uint16_t packet_drops)
{
uint8_t i, nextid;
struct mavlink_queue *q = &mavlink_queue[(uint8_t)chan];
// see if we can send the deferred messages, if any
while (q->num_deferred_messages != 0) {
if (!mavlink_try_send_message(chan,
q->deferred_messages[q->next_deferred_message],
packet_drops)) {
break;
}
q->next_deferred_message++;
if (q->next_deferred_message == MAX_DEFERRED_MESSAGES) {
q->next_deferred_message = 0;
}
q->num_deferred_messages--;
}
if (id == MSG_RETRY_DEFERRED) {
return;
}
// this message id might already be deferred
for (i=0, nextid = q->next_deferred_message; i < q->num_deferred_messages; i++) {
if (q->deferred_messages[nextid] == id) {
// its already deferred, discard
return;
}
nextid++;
if (nextid == MAX_DEFERRED_MESSAGES) {
nextid = 0;
}
}
if (q->num_deferred_messages != 0 ||
!mavlink_try_send_message(chan, id, packet_drops)) {
// can't send it now, so defer it
if (q->num_deferred_messages == MAX_DEFERRED_MESSAGES) {
// the defer buffer is full, discard
return;
}
nextid = q->next_deferred_message + q->num_deferred_messages;
if (nextid >= MAX_DEFERRED_MESSAGES) {
nextid -= MAX_DEFERRED_MESSAGES;
}
q->deferred_messages[nextid] = id;
q->num_deferred_messages++;
}
}
void mavlink_send_text(mavlink_channel_t chan, enum gcs_severity severity, char *str)
{
if (telemetry_delayed(chan)) {
return;
}
if (severity == SEVERITY_LOW) {
// send via the deferred queuing system
pending_status.severity = (uint8_t)severity;
mav_array_memcpy((char *)pending_status.text, str, sizeof(pending_status.text));
mavlink_send_message(chan, MSG_STATUSTEXT, 0);
} else {
// send immediately
mavlink_msg_statustext_send(
chan,
severity,
str);
}
}
void update(void)
{
// receive new packets
mavlink_message_t msg;
mavlink_status_t status;
status.packet_rx_drop_count = 0;
// process received bytes
while(serial_available())
{
uint8_t c = serial_read_ch();
// Try to get a new message
if (mavlink_parse_char(chan, c, &msg, &status)) {
mavlink_active = true;
//printf("%c",c);
printf("Received message with ID %d, sequence: %d from component %d of system %d",\
msg.msgid, msg.seq, msg.compid, msg.sysid);
handleMessage(&msg);
}
}
}
void handleMessage(mavlink_message_t* msg)
{
//struct Location tell_command = {}; // command for telemetry
switch (msg->msgid) {
case MAVLINK_MSG_ID_HEARTBEAT: {
mavlink_msg_heartbeat_decode(msg, &heartbeat);
break;
}
case MAVLINK_MSG_ID_ATTITUDE: {
mavlink_msg_attitude_decode(msg, &attitude);
break;
}
case MAVLINK_MSG_ID_GLOBAL_POSITION_INT: {
mavlink_msg_global_position_int_decode(msg, &position);
break;
}
//
// case MAVLINK_MSG_ID_AHRS: {
// mavlink_msg_ahrs_decode(msg, &ahrs);
// break;
// }
default:
break;
} // end switch
} // end handle mavlink
5.添加define.h函数,这里是上层函数的一些结构类型定义,为避免上层报错就添加上(有兴趣可以自己精简)
// -*- tab-width: 4; Mode: C++; c-basic-offset: 4; indent-tabs-mode: nil -*-
#ifndef _DEFINES_H//作者:恒久力行 qq:624668529
#define _DEFINES_H
// this avoids a very common config error
#define ENABLE ENABLED
#define DISABLE DISABLED
// Flight modes
// ------------
#define YAW_HOLD 0
#define YAW_ACRO 1
#define YAW_AUTO 2
#define YAW_LOOK_AT_HOME 3
#define YAW_TOY 4 // THOR This is the Yaw mode
#define ROLL_PITCH_STABLE 0
#define ROLL_PITCH_ACRO 1
#define ROLL_PITCH_AUTO 2
#define ROLL_PITCH_STABLE_OF 3
#define ROLL_PITCH_TOY 4 // THOR This is the Roll and Pitch
// mode
#define THROTTLE_MANUAL 0
#define THROTTLE_HOLD 1
#define THROTTLE_AUTO 2
// active altitude sensor
// ----------------------
#define SONAR 0
#define BARO 1
#define SONAR_SOURCE_ADC 1
#define SONAR_SOURCE_ANALOG_PIN 2
// CH 7 control
#define CH7_DO_NOTHING 0
#define CH7_SET_HOVER 1
#define CH7_FLIP 2
#define CH7_SIMPLE_MODE 3
#define CH7_RTL 4
#define CH7_AUTO_TRIM 5
#define CH7_ADC_FILTER 6
#define CH7_SAVE_WP 7
#define CH7_MULTI_MODE 8
// Frame types
#define QUAD_FRAME 0
#define TRI_FRAME 1
#define HEXA_FRAME 2
#define Y6_FRAME 3
#define OCTA_FRAME 4
#define HELI_FRAME 5
#define OCTA_QUAD_FRAME 6
#define PLUS_FRAME 0
#define X_FRAME 1
#define V_FRAME 2
// LED output
#define NORMAL_LEDS 0
#define AUTO_TRIM_LEDS 1
#define CH_7_PWM_TRIGGER 1800
#define CH_6_PWM_TRIGGER_HIGH 1800
#define CH_6_PWM_TRIGGER 1500
#define CH_6_PWM_TRIGGER_LOW 1200
// Internal defines, don't edit and expect things to work
// -------------------------------------------------------
#define TRUE 1
#define FALSE 0
#define ToRad(x) (x*0.01745329252) // *pi/180
#define ToDeg(x) (x*57.2957795131) // *180/pi
#define DEBUG 0
#define LOITER_RANGE 60 // for calculating power outside of loiter radius
#define T6 1000000
#define T7 10000000
// GPS type codes - use the names, not the numbers
#define GPS_PROTOCOL_NONE -1
#define GPS_PROTOCOL_NMEA 0
#define GPS_PROTOCOL_SIRF 1
#define GPS_PROTOCOL_UBLOX 2
#define GPS_PROTOCOL_IMU 3
#define GPS_PROTOCOL_MTK 4
#define GPS_PROTOCOL_HIL 5
#define GPS_PROTOCOL_MTK16 6
#define GPS_PROTOCOL_AUTO 7
#define CH_ROLL CH_1
#define CH_PITCH CH_2
#define CH_THROTTLE CH_3
#define CH_RUDDER CH_4
#define CH_YAW CH_4
#define RC_CHANNEL_ANGLE 0
#define RC_CHANNEL_RANGE 1
#define RC_CHANNEL_ANGLE_RAW 2
// HIL enumerations
#define HIL_MODE_DISABLED 0
#define HIL_MODE_ATTITUDE 1
#define HIL_MODE_SENSORS 2
#define ASCENDING 1
#define DESCENDING -1
#define REACHED_ALT 0
// Auto Pilot modes
// ----------------
#define STABILIZE 0 // hold level position
#define ACRO 1 // rate control
#define ALT_HOLD 2 // AUTO control
#define AUTO 3 // AUTO control
#define GUIDED 4 // AUTO control
#define LOITER 5 // Hold a single location
#define RTL 6 // AUTO control
#define CIRCLE 7 // AUTO control
#define POSITION 8 // AUTO control
#define LAND 9 // AUTO control
#define OF_LOITER 10 // Hold a single location using optical flow
// sensor
#define TOY_A 11 // THOR Enum for Toy mode
#define TOY_M 12 // THOR Enum for Toy mode
#define NUM_MODES 13
#define SIMPLE_1 1
#define SIMPLE_2 2
#define SIMPLE_3 4
#define SIMPLE_4 8
#define SIMPLE_5 16
#define SIMPLE_6 32
// CH_6 Tuning
// -----------
#define CH6_NONE 0
// Attitude
#define CH6_STABILIZE_KP 1
#define CH6_STABILIZE_KI 2
#define CH6_STABILIZE_KD 29 // duplicate with CH6_DAMP
#define CH6_YAW_KP 3
#define CH6_YAW_KI 24
// Rate
#define CH6_ACRO_KP 25
#define CH6_RATE_KP 4
#define CH6_RATE_KI 5
#define CH6_RATE_KD 21
#define CH6_YAW_RATE_KP 6
#define CH6_YAW_RATE_KD 26
// Altitude rate controller
#define CH6_THROTTLE_KP 7
// Extras
#define CH6_TOP_BOTTOM_RATIO 8
#define CH6_RELAY 9
// Navigation
#define CH6_TRAVERSE_SPEED 10 // maximum speed to next way point
#define CH6_NAV_KP 11
#define CH6_LOITER_KP 12
#define CH6_LOITER_KI 27
// Trad Heli specific
#define CH6_HELI_EXTERNAL_GYRO 13
// altitude controller
#define CH6_THR_HOLD_KP 14
#define CH6_Z_GAIN 15
#define CH6_DAMP 16 // duplicate with CH6_YAW_RATE_KD
// optical flow controller
#define CH6_OPTFLOW_KP 17
#define CH6_OPTFLOW_KI 18
#define CH6_OPTFLOW_KD 19
#define CH6_NAV_I 20
#define CH6_LOITER_RATE_KP 22
#define CH6_LOITER_RATE_KI 28
#define CH6_LOITER_RATE_KD 23
#define CH6_AHRS_YAW_KP 30
#define CH6_AHRS_KP 31
// nav byte mask
// -------------
#define NAV_LOCATION 1
#define NAV_ALTITUDE 2
#define NAV_DELAY 4
// Commands - Note that APM now uses a subset of the MAVLink protocol
// commands. See enum MAV_CMD in the GCS_Mavlink library
#define CMD_BLANK 0 // there is no command stored in the mem location
// requested
#define NO_COMMAND 0
#define LOITER_MODE 1
#define WP_MODE 2
#define CIRCLE_MODE 3
#define NO_NAV_MODE 4
#define TOY_MODE 5 // THOR This mode defines the Virtual
// WP following mode
// TOY mixing options
#define TOY_LOOKUP_TABLE 0
#define TOY_LINEAR_MIXER 1
#define TOY_EXTERNAL_MIXER 2
// Waypoint options
#define MASK_OPTIONS_RELATIVE_ALT 1
#define WP_OPTION_ALT_CHANGE 2
#define WP_OPTION_YAW 4
#define WP_OPTION_ALT_REQUIRED 8
#define WP_OPTION_RELATIVE 16
//#define WP_OPTION_ 32
//#define WP_OPTION_ 64
#define WP_OPTION_NEXT_CMD 128
//repeating events
#define NO_REPEAT 0
#define CH_5_TOGGLE 1
#define CH_6_TOGGLE 2
#define CH_7_TOGGLE 3
#define CH_8_TOGGLE 4
#define RELAY_TOGGLE 5
#define STOP_REPEAT 10
// GCS Message ID's
/// NOTE: to ensure we never block on sending MAVLink messages
/// please keep each MSG_ to a single MAVLink message. If need be
/// create new MSG_ IDs for additional messages on the same
/// stream
enum ap_message {
MSG_HEARTBEAT,
MSG_ATTITUDE,
MSG_LOCATION,
MSG_EXTENDED_STATUS1,
MSG_EXTENDED_STATUS2,
MSG_NAV_CONTROLLER_OUTPUT,
MSG_CURRENT_WAYPOINT,
MSG_VFR_HUD,
MSG_RADIO_OUT,
MSG_RADIO_IN,
MSG_RAW_IMU1,
MSG_RAW_IMU2,
MSG_RAW_IMU3,
MSG_GPS_STATUS,
MSG_GPS_RAW,
MSG_SERVO_OUT,
MSG_NEXT_WAYPOINT,
MSG_NEXT_PARAM,
MSG_STATUSTEXT,
MSG_LIMITS_STATUS,
MSG_AHRS,
MSG_SIMSTATE,
MSG_HWSTATUS,
MSG_RETRY_DEFERRED // this must be last
};
enum gcs_severity {
SEVERITY_LOW=1,
SEVERITY_MEDIUM,
SEVERITY_HIGH,
SEVERITY_CRITICAL
};
// Logging parameters
#define TYPE_AIRSTART_MSG 0x00
#define TYPE_GROUNDSTART_MSG 0x01
#define LOG_ATTITUDE_MSG 0x01
#define LOG_GPS_MSG 0x02
#define LOG_MODE_MSG 0x03
#define LOG_CONTROL_TUNING_MSG 0x04
#define LOG_NAV_TUNING_MSG 0x05
#define LOG_PERFORMANCE_MSG 0x06
#define LOG_RAW_MSG 0x07
#define LOG_CMD_MSG 0x08
#define LOG_CURRENT_MSG 0x09
#define LOG_STARTUP_MSG 0x0A
#define LOG_MOTORS_MSG 0x0B
#define LOG_OPTFLOW_MSG 0x0C
#define LOG_DATA_MSG 0x0D
#define LOG_PID_MSG 0x0E
#define LOG_ITERM_MSG 0x0F
#define LOG_DMP_MSG 0x10
#define LOG_INDEX_MSG 0xF0
#define MAX_NUM_LOGS 50
#define MASK_LOG_ATTITUDE_FAST (1<<0)
#define MASK_LOG_ATTITUDE_MED (1<<1)
#define MASK_LOG_GPS (1<<2)
#define MASK_LOG_PM (1<<3)
#define MASK_LOG_CTUN (1<<4)
#define MASK_LOG_NTUN (1<<5)
#define MASK_LOG_MODE (1<<6)
#define MASK_LOG_RAW (1<<7)
#define MASK_LOG_CMD (1<<8)
#define MASK_LOG_CUR (1<<9)
#define MASK_LOG_MOTORS (1<<10)
#define MASK_LOG_OPTFLOW (1<<11)
#define MASK_LOG_PID (1<<12)
#define MASK_LOG_ITERM (1<<13)
// Waypoint Modes
// ----------------
#define ABS_WP 0
#define REL_WP 1
// Command Queues
// ---------------
#define COMMAND_MUST 0
#define COMMAND_MAY 1
#define COMMAND_NOW 2
// Events
// ------
#define EVENT_WILL_REACH_WAYPOINT 1
#define EVENT_SET_NEW_WAYPOINT_INDEX 2
#define EVENT_LOADED_WAYPOINT 3
#define EVENT_LOOP 4
// Climb rate calculations
#define ALTITUDE_HISTORY_LENGTH 8 //Number of (time,altitude) points to
// regress a climb rate from
#define BATTERY_VOLTAGE(x) (x*(g.input_voltage/1024.0))*g.volt_div_ratio
#define CURRENT_AMPS(x) ((x*(g.input_voltage/1024.0))-CURR_AMPS_OFFSET)*g.curr_amp_per_volt
//#define BARO_FILTER_SIZE 8
/* ************************************************************** */
/* Expansion PIN's that people can use for various things. */
// AN0 - 7 are located at edge of IMU PCB "above" pressure sensor and
// Expansion port
// AN0 - 5 are also located next to voltage dividers and sliding SW2 switch
// AN0 - 3 has 10kOhm resistor in serial, include 3.9kOhm to make it as
// voltage divider
// AN4 - 5 are direct GPIO pins from atmega1280 and they are the latest pins
// next to SW2 switch
// Look more ArduCopter Wiki for voltage dividers and other ports
#define AN0 54 // resistor, vdiv use, divider 1 closest to relay
#define AN1 55 // resistor, vdiv use, divider 2
#define AN2 56 // resistor, vdiv use, divider 3
#define AN3 57 // resistor, vdiv use, divider 4 closest to SW2
#define AN4 58 // direct GPIO pin, default as analog input, next to SW2
// switch
#define AN5 59 // direct GPIO pin, default as analog input, next to SW2
// switch
#define AN6 60 // direct GPIO pin, default as analog input, close to
// Pressure sensor, Expansion Ports
#define AN7 61 // direct GPIO pin, default as analog input, close to
// Pressure sensor, Expansion Ports
// AN8 - 15 are located at edge of IMU PCB "above" pressure sensor and
// Expansion port
// AN8 - 15 PINs are not connected anywhere, they are located as last 8 pins
// on edge of the board above Expansion Ports
// even pins (8,10,12,14) are at edge of board, Odd pins (9,11,13,15) are on
// inner row
#define AN8 62 // NC
#define AN9 63 // NC
#define AN10 64 // NC
#define AN11 65 // NC
#define AN12 66 // NC
#define AN13 67 // NC
#define AN14 68 // NC
#define AN15 69 // NC
#define RELAY_PIN 47
#define PIEZO_PIN AN5 //Last pin on the back ADC connector
// sonar
//#define SonarToCm(x) (x*1.26) // Sonar raw value to centimeters
// RADIANS
#define RADX100 0.000174532925
#define DEGX100 5729.57795
// EEPROM addresses
#define EEPROM_MAX_ADDR 4096
// parameters get the first 1536 bytes of EEPROM, remainder is for waypoints
#define WP_START_BYTE 0x600 // where in memory home WP is stored + all other
// WP
#define WP_SIZE 15
#define ONBOARD_PARAM_NAME_LENGTH 15
// fence points are stored at the end of the EEPROM
#define MAX_FENCEPOINTS 6
#define FENCE_WP_SIZE sizeof(Vector2l)
#define FENCE_START_BYTE (EEPROM_MAX_ADDR-(MAX_FENCEPOINTS*FENCE_WP_SIZE))
#define MAX_WAYPOINTS ((FENCE_START_BYTE - WP_START_BYTE) / WP_SIZE) - 1 // -
// 1
// to
// be
// safe
// mark a function as not to be inlined
#define NOINLINE __attribute__((noinline))
// IMU selection
#define CONFIG_IMU_OILPAN 1
#define CONFIG_IMU_MPU6000 2
// APM Hardware selection
#define APM_HARDWARE_APM1 1
#define APM_HARDWARE_APM2 2
#define AP_BARO_BMP085 1
#define AP_BARO_MS5611 2
#define LOGGING_SIMPLE 1
#define LOGGING_VERBOSE 2
// Channel Config selection
#define CHANNEL_CONFIG_DEFAULT 1
#define CHANNEL_CONFIG_CUSTOM 2
#endif // _DEFINES_H//作者:恒久力行 qq:624668529
#ifndef _DEFINES_H//作者:恒久力行 qq:624668529
#define _DEFINES_H
// this avoids a very common config error
#define ENABLE ENABLED
#define DISABLE DISABLED
// Flight modes
// ------------
#define YAW_HOLD 0
#define YAW_ACRO 1
#define YAW_AUTO 2
#define YAW_LOOK_AT_HOME 3
#define YAW_TOY 4 // THOR This is the Yaw mode
#define ROLL_PITCH_STABLE 0
#define ROLL_PITCH_ACRO 1
#define ROLL_PITCH_AUTO 2
#define ROLL_PITCH_STABLE_OF 3
#define ROLL_PITCH_TOY 4 // THOR This is the Roll and Pitch
// mode
#define THROTTLE_MANUAL 0
#define THROTTLE_HOLD 1
#define THROTTLE_AUTO 2
// active altitude sensor
// ----------------------
#define SONAR 0
#define BARO 1
#define SONAR_SOURCE_ADC 1
#define SONAR_SOURCE_ANALOG_PIN 2
// CH 7 control
#define CH7_DO_NOTHING 0
#define CH7_SET_HOVER 1
#define CH7_FLIP 2
#define CH7_SIMPLE_MODE 3
#define CH7_RTL 4
#define CH7_AUTO_TRIM 5
#define CH7_ADC_FILTER 6
#define CH7_SAVE_WP 7
#define CH7_MULTI_MODE 8
// Frame types
#define QUAD_FRAME 0
#define TRI_FRAME 1
#define HEXA_FRAME 2
#define Y6_FRAME 3
#define OCTA_FRAME 4
#define HELI_FRAME 5
#define OCTA_QUAD_FRAME 6
#define PLUS_FRAME 0
#define X_FRAME 1
#define V_FRAME 2
// LED output
#define NORMAL_LEDS 0
#define AUTO_TRIM_LEDS 1
#define CH_7_PWM_TRIGGER 1800
#define CH_6_PWM_TRIGGER_HIGH 1800
#define CH_6_PWM_TRIGGER 1500
#define CH_6_PWM_TRIGGER_LOW 1200
// Internal defines, don't edit and expect things to work
// -------------------------------------------------------
#define TRUE 1
#define FALSE 0
#define ToRad(x) (x*0.01745329252) // *pi/180
#define ToDeg(x) (x*57.2957795131) // *180/pi
#define DEBUG 0
#define LOITER_RANGE 60 // for calculating power outside of loiter radius
#define T6 1000000
#define T7 10000000
// GPS type codes - use the names, not the numbers
#define GPS_PROTOCOL_NONE -1
#define GPS_PROTOCOL_NMEA 0
#define GPS_PROTOCOL_SIRF 1
#define GPS_PROTOCOL_UBLOX 2
#define GPS_PROTOCOL_IMU 3
#define GPS_PROTOCOL_MTK 4
#define GPS_PROTOCOL_HIL 5
#define GPS_PROTOCOL_MTK16 6
#define GPS_PROTOCOL_AUTO 7
#define CH_ROLL CH_1
#define CH_PITCH CH_2
#define CH_THROTTLE CH_3
#define CH_RUDDER CH_4
#define CH_YAW CH_4
#define RC_CHANNEL_ANGLE 0
#define RC_CHANNEL_RANGE 1
#define RC_CHANNEL_ANGLE_RAW 2
// HIL enumerations
#define HIL_MODE_DISABLED 0
#define HIL_MODE_ATTITUDE 1
#define HIL_MODE_SENSORS 2
#define ASCENDING 1
#define DESCENDING -1
#define REACHED_ALT 0
// Auto Pilot modes
// ----------------
#define STABILIZE 0 // hold level position
#define ACRO 1 // rate control
#define ALT_HOLD 2 // AUTO control
#define AUTO 3 // AUTO control
#define GUIDED 4 // AUTO control
#define LOITER 5 // Hold a single location
#define RTL 6 // AUTO control
#define CIRCLE 7 // AUTO control
#define POSITION 8 // AUTO control
#define LAND 9 // AUTO control
#define OF_LOITER 10 // Hold a single location using optical flow
// sensor
#define TOY_A 11 // THOR Enum for Toy mode
#define TOY_M 12 // THOR Enum for Toy mode
#define NUM_MODES 13
#define SIMPLE_1 1
#define SIMPLE_2 2
#define SIMPLE_3 4
#define SIMPLE_4 8
#define SIMPLE_5 16
#define SIMPLE_6 32
// CH_6 Tuning
// -----------
#define CH6_NONE 0
// Attitude
#define CH6_STABILIZE_KP 1
#define CH6_STABILIZE_KI 2
#define CH6_STABILIZE_KD 29 // duplicate with CH6_DAMP
#define CH6_YAW_KP 3
#define CH6_YAW_KI 24
// Rate
#define CH6_ACRO_KP 25
#define CH6_RATE_KP 4
#define CH6_RATE_KI 5
#define CH6_RATE_KD 21
#define CH6_YAW_RATE_KP 6
#define CH6_YAW_RATE_KD 26
// Altitude rate controller
#define CH6_THROTTLE_KP 7
// Extras
#define CH6_TOP_BOTTOM_RATIO 8
#define CH6_RELAY 9
// Navigation
#define CH6_TRAVERSE_SPEED 10 // maximum speed to next way point
#define CH6_NAV_KP 11
#define CH6_LOITER_KP 12
#define CH6_LOITER_KI 27
// Trad Heli specific
#define CH6_HELI_EXTERNAL_GYRO 13
// altitude controller
#define CH6_THR_HOLD_KP 14
#define CH6_Z_GAIN 15
#define CH6_DAMP 16 // duplicate with CH6_YAW_RATE_KD
// optical flow controller
#define CH6_OPTFLOW_KP 17
#define CH6_OPTFLOW_KI 18
#define CH6_OPTFLOW_KD 19
#define CH6_NAV_I 20
#define CH6_LOITER_RATE_KP 22
#define CH6_LOITER_RATE_KI 28
#define CH6_LOITER_RATE_KD 23
#define CH6_AHRS_YAW_KP 30
#define CH6_AHRS_KP 31
// nav byte mask
// -------------
#define NAV_LOCATION 1
#define NAV_ALTITUDE 2
#define NAV_DELAY 4
// Commands - Note that APM now uses a subset of the MAVLink protocol
// commands. See enum MAV_CMD in the GCS_Mavlink library
#define CMD_BLANK 0 // there is no command stored in the mem location
// requested
#define NO_COMMAND 0
#define LOITER_MODE 1
#define WP_MODE 2
#define CIRCLE_MODE 3
#define NO_NAV_MODE 4
#define TOY_MODE 5 // THOR This mode defines the Virtual
// WP following mode
// TOY mixing options
#define TOY_LOOKUP_TABLE 0
#define TOY_LINEAR_MIXER 1
#define TOY_EXTERNAL_MIXER 2
// Waypoint options
#define MASK_OPTIONS_RELATIVE_ALT 1
#define WP_OPTION_ALT_CHANGE 2
#define WP_OPTION_YAW 4
#define WP_OPTION_ALT_REQUIRED 8
#define WP_OPTION_RELATIVE 16
//#define WP_OPTION_ 32
//#define WP_OPTION_ 64
#define WP_OPTION_NEXT_CMD 128
//repeating events
#define NO_REPEAT 0
#define CH_5_TOGGLE 1
#define CH_6_TOGGLE 2
#define CH_7_TOGGLE 3
#define CH_8_TOGGLE 4
#define RELAY_TOGGLE 5
#define STOP_REPEAT 10
// GCS Message ID's
/// NOTE: to ensure we never block on sending MAVLink messages
/// please keep each MSG_ to a single MAVLink message. If need be
/// create new MSG_ IDs for additional messages on the same
/// stream
enum ap_message {
MSG_HEARTBEAT,
MSG_ATTITUDE,
MSG_LOCATION,
MSG_EXTENDED_STATUS1,
MSG_EXTENDED_STATUS2,
MSG_NAV_CONTROLLER_OUTPUT,
MSG_CURRENT_WAYPOINT,
MSG_VFR_HUD,
MSG_RADIO_OUT,
MSG_RADIO_IN,
MSG_RAW_IMU1,
MSG_RAW_IMU2,
MSG_RAW_IMU3,
MSG_GPS_STATUS,
MSG_GPS_RAW,
MSG_SERVO_OUT,
MSG_NEXT_WAYPOINT,
MSG_NEXT_PARAM,
MSG_STATUSTEXT,
MSG_LIMITS_STATUS,
MSG_AHRS,
MSG_SIMSTATE,
MSG_HWSTATUS,
MSG_RETRY_DEFERRED // this must be last
};
enum gcs_severity {
SEVERITY_LOW=1,
SEVERITY_MEDIUM,
SEVERITY_HIGH,
SEVERITY_CRITICAL
};
// Logging parameters
#define TYPE_AIRSTART_MSG 0x00
#define TYPE_GROUNDSTART_MSG 0x01
#define LOG_ATTITUDE_MSG 0x01
#define LOG_GPS_MSG 0x02
#define LOG_MODE_MSG 0x03
#define LOG_CONTROL_TUNING_MSG 0x04
#define LOG_NAV_TUNING_MSG 0x05
#define LOG_PERFORMANCE_MSG 0x06
#define LOG_RAW_MSG 0x07
#define LOG_CMD_MSG 0x08
#define LOG_CURRENT_MSG 0x09
#define LOG_STARTUP_MSG 0x0A
#define LOG_MOTORS_MSG 0x0B
#define LOG_OPTFLOW_MSG 0x0C
#define LOG_DATA_MSG 0x0D
#define LOG_PID_MSG 0x0E
#define LOG_ITERM_MSG 0x0F
#define LOG_DMP_MSG 0x10
#define LOG_INDEX_MSG 0xF0
#define MAX_NUM_LOGS 50
#define MASK_LOG_ATTITUDE_FAST (1<<0)
#define MASK_LOG_ATTITUDE_MED (1<<1)
#define MASK_LOG_GPS (1<<2)
#define MASK_LOG_PM (1<<3)
#define MASK_LOG_CTUN (1<<4)
#define MASK_LOG_NTUN (1<<5)
#define MASK_LOG_MODE (1<<6)
#define MASK_LOG_RAW (1<<7)
#define MASK_LOG_CMD (1<<8)
#define MASK_LOG_CUR (1<<9)
#define MASK_LOG_MOTORS (1<<10)
#define MASK_LOG_OPTFLOW (1<<11)
#define MASK_LOG_PID (1<<12)
#define MASK_LOG_ITERM (1<<13)
// Waypoint Modes
// ----------------
#define ABS_WP 0
#define REL_WP 1
// Command Queues
// ---------------
#define COMMAND_MUST 0
#define COMMAND_MAY 1
#define COMMAND_NOW 2
// Events
// ------
#define EVENT_WILL_REACH_WAYPOINT 1
#define EVENT_SET_NEW_WAYPOINT_INDEX 2
#define EVENT_LOADED_WAYPOINT 3
#define EVENT_LOOP 4
// Climb rate calculations
#define ALTITUDE_HISTORY_LENGTH 8 //Number of (time,altitude) points to
// regress a climb rate from
#define BATTERY_VOLTAGE(x) (x*(g.input_voltage/1024.0))*g.volt_div_ratio
#define CURRENT_AMPS(x) ((x*(g.input_voltage/1024.0))-CURR_AMPS_OFFSET)*g.curr_amp_per_volt
//#define BARO_FILTER_SIZE 8
/* ************************************************************** */
/* Expansion PIN's that people can use for various things. */
// AN0 - 7 are located at edge of IMU PCB "above" pressure sensor and
// Expansion port
// AN0 - 5 are also located next to voltage dividers and sliding SW2 switch
// AN0 - 3 has 10kOhm resistor in serial, include 3.9kOhm to make it as
// voltage divider
// AN4 - 5 are direct GPIO pins from atmega1280 and they are the latest pins
// next to SW2 switch
// Look more ArduCopter Wiki for voltage dividers and other ports
#define AN0 54 // resistor, vdiv use, divider 1 closest to relay
#define AN1 55 // resistor, vdiv use, divider 2
#define AN2 56 // resistor, vdiv use, divider 3
#define AN3 57 // resistor, vdiv use, divider 4 closest to SW2
#define AN4 58 // direct GPIO pin, default as analog input, next to SW2
// switch
#define AN5 59 // direct GPIO pin, default as analog input, next to SW2
// switch
#define AN6 60 // direct GPIO pin, default as analog input, close to
// Pressure sensor, Expansion Ports
#define AN7 61 // direct GPIO pin, default as analog input, close to
// Pressure sensor, Expansion Ports
// AN8 - 15 are located at edge of IMU PCB "above" pressure sensor and
// Expansion port
// AN8 - 15 PINs are not connected anywhere, they are located as last 8 pins
// on edge of the board above Expansion Ports
// even pins (8,10,12,14) are at edge of board, Odd pins (9,11,13,15) are on
// inner row
#define AN8 62 // NC
#define AN9 63 // NC
#define AN10 64 // NC
#define AN11 65 // NC
#define AN12 66 // NC
#define AN13 67 // NC
#define AN14 68 // NC
#define AN15 69 // NC
#define RELAY_PIN 47
#define PIEZO_PIN AN5 //Last pin on the back ADC connector
// sonar
//#define SonarToCm(x) (x*1.26) // Sonar raw value to centimeters
// RADIANS
#define RADX100 0.000174532925
#define DEGX100 5729.57795
// EEPROM addresses
#define EEPROM_MAX_ADDR 4096
// parameters get the first 1536 bytes of EEPROM, remainder is for waypoints
#define WP_START_BYTE 0x600 // where in memory home WP is stored + all other
// WP
#define WP_SIZE 15
#define ONBOARD_PARAM_NAME_LENGTH 15
// fence points are stored at the end of the EEPROM
#define MAX_FENCEPOINTS 6
#define FENCE_WP_SIZE sizeof(Vector2l)
#define FENCE_START_BYTE (EEPROM_MAX_ADDR-(MAX_FENCEPOINTS*FENCE_WP_SIZE))
#define MAX_WAYPOINTS ((FENCE_START_BYTE - WP_START_BYTE) / WP_SIZE) - 1 // -
// 1
// to
// be
// safe
// mark a function as not to be inlined
#define NOINLINE __attribute__((noinline))
// IMU selection
#define CONFIG_IMU_OILPAN 1
#define CONFIG_IMU_MPU6000 2
// APM Hardware selection
#define APM_HARDWARE_APM1 1
#define APM_HARDWARE_APM2 2
#define AP_BARO_BMP085 1
#define AP_BARO_MS5611 2
#define LOGGING_SIMPLE 1
#define LOGGING_VERBOSE 2
// Channel Config selection
#define CHANNEL_CONFIG_DEFAULT 1
#define CHANNEL_CONFIG_CUSTOM 2
#endif // _DEFINES_H//作者:恒久力行 qq:624668529
6.主函数也有更改,这里是main.c所有代码
main.c
#include "sys.h"//作者:恒久力行 qq:624668529
#include "delay.h"
#include "usart.h"
#include "led.h"
#include "beep.h"
#include "key.h"
#include "mavlink_avoid_errors.h"
#include "mavlink_usart_fifo.h"
#include "open_tel_mavlink.h"
//ALIENTEK 探索者STM32F407开发板 实验4
//串口通信实验 -库函数版本
//技术支持:www.openedv.com
//淘宝店铺:http://eboard.taobao.com
//广州市星翼电子科技有限公司
//作者:正点原子 @ALIENTEK
mavlink_system_t mavlink_system;
#define UART_TX_BUFFER_SIZE 255
#define UART_RX_BUFFER_SIZE 255
extern fifo_t uart_rx_fifo, uart_tx_fifo;
extern uint8_t uart_tx_buf[UART_TX_BUFFER_SIZE], uart_rx_buf[UART_RX_BUFFER_SIZE];
int main(void)
{
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//设置系统中断优先级分组2
delay_init(168);//延时初始化
uart_init(115200);//串口初始化波特率为115200
LED_Init(); //初始化与LED连接的硬件接口
fifo_init(&uart_tx_fifo, uart_tx_buf, UART_TX_BUFFER_SIZE);
fifo_init(&uart_rx_fifo, uart_rx_buf, UART_RX_BUFFER_SIZE);
mavlink_system.sysid = MAV_TYPE_GENERIC;
mavlink_system.compid = MAV_AUTOPILOT_GENERIC;
while(1)
{
mavlink_send_message(0, MSG_HEARTBEAT, 0);
mavlink_send_message(0, MSG_LOCATION, 0);
while(1)
{
// if(tranlTimer > 100)
// {
// tranlTimer = 0;
// mavlink_send_message(0, MSG_HEARTBEAT, 0);
// mavlink_send_message(0, MSG_ATTITUDE, 0);
// mavlink_send_message(0, MSG_AHRS, 0);
// }
update();
}
}
}
#include "delay.h"
#include "usart.h"
#include "led.h"
#include "beep.h"
#include "key.h"
#include "mavlink_avoid_errors.h"
#include "mavlink_usart_fifo.h"
#include "open_tel_mavlink.h"
//ALIENTEK 探索者STM32F407开发板 实验4
//串口通信实验 -库函数版本
//技术支持:www.openedv.com
//淘宝店铺:http://eboard.taobao.com
//广州市星翼电子科技有限公司
//作者:正点原子 @ALIENTEK
mavlink_system_t mavlink_system;
#define UART_TX_BUFFER_SIZE 255
#define UART_RX_BUFFER_SIZE 255
extern fifo_t uart_rx_fifo, uart_tx_fifo;
extern uint8_t uart_tx_buf[UART_TX_BUFFER_SIZE], uart_rx_buf[UART_RX_BUFFER_SIZE];
int main(void)
{
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//设置系统中断优先级分组2
delay_init(168);//延时初始化
uart_init(115200);//串口初始化波特率为115200
LED_Init(); //初始化与LED连接的硬件接口
fifo_init(&uart_tx_fifo, uart_tx_buf, UART_TX_BUFFER_SIZE);
fifo_init(&uart_rx_fifo, uart_rx_buf, UART_RX_BUFFER_SIZE);
mavlink_system.sysid = MAV_TYPE_GENERIC;
mavlink_system.compid = MAV_AUTOPILOT_GENERIC;
while(1)
{
mavlink_send_message(0, MSG_HEARTBEAT, 0);
mavlink_send_message(0, MSG_LOCATION, 0);
while(1)
{
// if(tranlTimer > 100)
// {
// tranlTimer = 0;
// mavlink_send_message(0, MSG_HEARTBEAT, 0);
// mavlink_send_message(0, MSG_ATTITUDE, 0);
// mavlink_send_message(0, MSG_AHRS, 0);
// }
update();
}
}
}
7.mavlink_helpers.h,在以前基础上增加如下代码(如有重复函数,请屏蔽以前的函数)
跟原来官方不同的还有MAVLINK_HELPER uint16_t mavlink_msg_to_send_buffer(uint8_t *buffer, const mavlink_message_t *msg)这个函数参数定义到函数最前面了。全代码是修改后的,有兴趣的可以去比较。不修改的话会报错。
#include"mavlink_usart_fifo.h"externmavlink_system_t mavlink_system;MAVLINK_HELPERvoid _mavlink_send_uart(mavlink_channel_t chan,constchar*buf,uint16_t len){serial_write_buf((uint8_t*)buf, len);}
#ifndef _MAVLINK_HELPERS_H_//作者:恒久力行 qq:624668529
#define _MAVLINK_HELPERS_H_
#include "string.h"
#include "checksum.h"
#include "mavlink_types.h"
#include "mavlink_conversions.h"
#ifndef MAVLINK_HELPER
#define MAVLINK_HELPER
#endif
extern mavlink_system_t mavlink_system;
/*
* Internal function to give access to the channel status for each channel
*/
#ifndef MAVLINK_GET_CHANNEL_STATUS
MAVLINK_HELPER mavlink_status_t* mavlink_get_channel_status(uint8_t chan)
{
#ifdef MAVLINK_EXTERNAL_RX_STATUS
// No m_mavlink_status array defined in function,
// has to be defined externally
#else
static mavlink_status_t m_mavlink_status[MAVLINK_COMM_NUM_BUFFERS];
#endif
return &m_mavlink_status[chan];
}
#endif
/*
* Internal function to give access to the channel buffer for each channel
*/
#ifndef MAVLINK_GET_CHANNEL_BUFFER
MAVLINK_HELPER mavlink_message_t* mavlink_get_channel_buffer(uint8_t chan)
{
#ifdef MAVLINK_EXTERNAL_RX_BUFFER
// No m_mavlink_buffer array defined in function,
// has to be defined externally
#else
static mavlink_message_t m_mavlink_buffer[MAVLINK_COMM_NUM_BUFFERS];
#endif
return &m_mavlink_buffer[chan];
}
#endif
/**
* @brief Reset the status of a channel.
*/
MAVLINK_HELPER void mavlink_reset_channel_status(uint8_t chan)
{
mavlink_status_t *status = mavlink_get_channel_status(chan);
status->parse_state = MAVLINK_PARSE_STATE_IDLE;
}
/**
* @brief Finalize a MAVLink message with channel assignment
*
* This function calculates the checksum and sets length and aircraft id correctly.
* It assumes that the message id and the payload are already correctly set. This function
* can also be used if the message header has already been written before (as in mavlink_msg_xxx_pack
* instead of mavlink_msg_xxx_pack_headerless), it just introduces little extra overhead.
*
* @param msg Message to finalize
* @param system_id Id of the sending (this) system, 1-127
* @param length Message length
*/
#if MAVLINK_CRC_EXTRA
MAVLINK_HELPER uint16_t mavlink_finalize_message_chan(mavlink_message_t* msg, uint8_t system_id, uint8_t component_id,
uint8_t chan, uint8_t min_length, uint8_t length, uint8_t crc_extra)
#else
MAVLINK_HELPER uint16_t mavlink_finalize_message_chan(mavlink_message_t* msg, uint8_t system_id, uint8_t component_id,
uint8_t chan, uint8_t length)
#endif
{
// This is only used for the v2 protocol and we silence it here
(void)min_length;
// This code part is the same for all messages;
msg->magic = MAVLINK_STX;
msg->len = length;
msg->sysid = system_id;
msg->compid = component_id;
// One sequence number per channel
msg->seq = mavlink_get_channel_status(chan)->current_tx_seq;
mavlink_get_channel_status(chan)->current_tx_seq = mavlink_get_channel_status(chan)->current_tx_seq+1;
msg->checksum = crc_calculate(((const uint8_t*)(msg)) + 3, MAVLINK_CORE_HEADER_LEN);
crc_accumulate_buffer(&msg->checksum, _MAV_PAYLOAD(msg), msg->len);
#if MAVLINK_CRC_EXTRA
crc_accumulate(crc_extra, &msg->checksum);
#endif
mavlink_ck_a(msg) = (uint8_t)(msg->checksum & 0xFF);
mavlink_ck_b(msg) = (uint8_t)(msg->checksum >> 8);
return length + MAVLINK_NUM_NON_PAYLOAD_BYTES;
}
/**
* @brief Finalize a MAVLink message with MAVLINK_COMM_0 as default channel
*/
#if MAVLINK_CRC_EXTRA
MAVLINK_HELPER uint16_t mavlink_finalize_message(mavlink_message_t* msg, uint8_t system_id, uint8_t component_id,
uint8_t min_length, uint8_t length, uint8_t crc_extra)
{
return mavlink_finalize_message_chan(msg, system_id, component_id, MAVLINK_COMM_0, min_length, length, crc_extra);
}
#else
MAVLINK_HELPER uint16_t mavlink_finalize_message(mavlink_message_t* msg, uint8_t system_id, uint8_t component_id,
uint8_t length)
{
return mavlink_finalize_message_chan(msg, system_id, component_id, MAVLINK_COMM_0, length);
}
#endif
#ifdef MAVLINK_USE_CONVENIENCE_FUNCTIONS
MAVLINK_HELPER void _mavlink_send_uart(mavlink_channel_t chan, const char *buf, uint16_t len);
/**
* @brief Finalize a MAVLink message with channel assignment and send
*/
#if MAVLINK_CRC_EXTRA
MAVLINK_HELPER void _mav_finalize_message_chan_send(mavlink_channel_t chan, uint8_t msgid, const char *packet,
uint8_t min_length, uint8_t length, uint8_t crc_extra)
#else
MAVLINK_HELPER void _mav_finalize_message_chan_send(mavlink_channel_t chan, uint8_t msgid, const char *packet, uint8_t length)
#endif
{
uint16_t checksum;
uint8_t buf[MAVLINK_NUM_HEADER_BYTES];
uint8_t ck[2];
mavlink_status_t *status = mavlink_get_channel_status(chan);
buf[0] = MAVLINK_STX;
buf[1] = length;
buf[2] = status->current_tx_seq;
buf[3] = mavlink_system.sysid;
buf[4] = mavlink_system.compid;
buf[5] = msgid;
status->current_tx_seq++;
checksum = crc_calculate((const uint8_t*)&buf[1], MAVLINK_CORE_HEADER_LEN);
crc_accumulate_buffer(&checksum, packet, length);
#if MAVLINK_CRC_EXTRA
crc_accumulate(crc_extra, &checksum);
#endif
ck[0] = (uint8_t)(checksum & 0xFF);
ck[1] = (uint8_t)(checksum >> 8);
MAVLINK_START_UART_SEND(chan, MAVLINK_NUM_NON_PAYLOAD_BYTES + (uint16_t)length);
_mavlink_send_uart(chan, (const char *)buf, MAVLINK_NUM_HEADER_BYTES);
_mavlink_send_uart(chan, packet, length);
_mavlink_send_uart(chan, (const char *)ck, 2);
MAVLINK_END_UART_SEND(chan, MAVLINK_NUM_NON_PAYLOAD_BYTES + (uint16_t)length);
}
/**
* @brief re-send a message over a uart channel
* this is more stack efficient than re-marshalling the message
*/
MAVLINK_HELPER void _mavlink_resend_uart(mavlink_channel_t chan, const mavlink_message_t *msg)
{
uint8_t ck[2];
ck[0] = (uint8_t)(msg->checksum & 0xFF);
ck[1] = (uint8_t)(msg->checksum >> 8);
// XXX use the right sequence here
MAVLINK_START_UART_SEND(chan, MAVLINK_NUM_NON_PAYLOAD_BYTES + msg->len);
_mavlink_send_uart(chan, (const char *)&msg->magic, MAVLINK_NUM_HEADER_BYTES);
_mavlink_send_uart(chan, _MAV_PAYLOAD(msg), msg->len);
_mavlink_send_uart(chan, (const char *)ck, 2);
MAVLINK_END_UART_SEND(chan, MAVLINK_NUM_NON_PAYLOAD_BYTES + msg->len);
}
#endif // MAVLINK_USE_CONVENIENCE_FUNCTIONS
/**
* @brief Pack a message to send it over a serial byte stream
*/
MAVLINK_HELPER uint16_t mavlink_msg_to_send_buffer(uint8_t *buffer, const mavlink_message_t *msg)
{
uint8_t *ck;
memcpy(buffer, (const uint8_t *)&msg->magic, MAVLINK_NUM_HEADER_BYTES + (uint16_t)msg->len);
ck = buffer + (MAVLINK_NUM_HEADER_BYTES + (uint16_t)msg->len);
ck[0] = (uint8_t)(msg->checksum & 0xFF);
ck[1] = (uint8_t)(msg->checksum >> 8);
return MAVLINK_NUM_NON_PAYLOAD_BYTES + (uint16_t)msg->len;
}
union __mavlink_bitfield {
uint8_t uint8;
int8_t int8;
uint16_t uint16;
int16_t int16;
uint32_t uint32;
int32_t int32;
};
MAVLINK_HELPER void mavlink_start_checksum(mavlink_message_t* msg)
{
crc_init(&msg->checksum);
}
MAVLINK_HELPER void mavlink_update_checksum(mavlink_message_t* msg, uint8_t c)
{
crc_accumulate(c, &msg->checksum);
}
/**
* This is a varient of mavlink_frame_char() but with caller supplied
* parsing buffers. It is useful when you want to create a MAVLink
* parser in a library that doesn't use any global variables
*
* @param rxmsg parsing message buffer
* @param status parsing starus buffer
* @param c The char to parse
*
* @param returnMsg NULL if no message could be decoded, the message data else
* @param returnStats if a message was decoded, this is filled with the channel's stats
* @return 0 if no message could be decoded, 1 on good message and CRC, 2 on bad CRC
*
* A typical use scenario of this function call is:
*
* @code
* #include <mavlink.h>
*
* mavlink_message_t msg;
* int chan = 0;
*
*
* while(serial.bytesAvailable > 0)
* {
* uint8_t byte = serial.getNextByte();
* if (mavlink_frame_char(chan, byte, &msg) != MAVLINK_FRAMING_INCOMPLETE)
* {
* printf("Received message with ID %d, sequence: %d from component %d of system %d", msg.msgid, msg.seq, msg.compid, msg.sysid);
* }
* }
*
*
* @endcode
*/
MAVLINK_HELPER uint8_t mavlink_frame_char_buffer(mavlink_message_t* rxmsg,
mavlink_status_t* status,
uint8_t c,
mavlink_message_t* r_message,
mavlink_status_t* r_mavlink_status)
{
/*
default message crc function. You can override this per-system to
put this data in a different memory segment
*/
#if MAVLINK_CRC_EXTRA
#ifndef MAVLINK_MESSAGE_CRC
static const uint8_t mavlink_message_crcs[256] = MAVLINK_MESSAGE_CRCS;
#define MAVLINK_MESSAGE_CRC(msgid) mavlink_message_crcs[msgid]
#endif
#endif
/* Enable this option to check the length of each message.
This allows invalid messages to be caught much sooner. Use if the transmission
medium is prone to missing (or extra) characters (e.g. a radio that fades in
and out). Only use if the channel will only contain messages types listed in
the headers.
*/
#ifdef MAVLINK_CHECK_MESSAGE_LENGTH
#ifndef MAVLINK_MESSAGE_LENGTH
static const uint8_t mavlink_message_lengths[256] = MAVLINK_MESSAGE_LENGTHS;
#define MAVLINK_MESSAGE_LENGTH(msgid) mavlink_message_lengths[msgid]
#endif
#endif
int bufferIndex = 0;
status->msg_received = MAVLINK_FRAMING_INCOMPLETE;
switch (status->parse_state)
{
case MAVLINK_PARSE_STATE_UNINIT:
case MAVLINK_PARSE_STATE_IDLE:
if (c == MAVLINK_STX)
{
status->parse_state = MAVLINK_PARSE_STATE_GOT_STX;
rxmsg->len = 0;
rxmsg->magic = c;
mavlink_start_checksum(rxmsg);
}
break;
case MAVLINK_PARSE_STATE_GOT_STX:
if (status->msg_received
/* Support shorter buffers than the
default maximum packet size */
#if (MAVLINK_MAX_PAYLOAD_LEN < 255)
|| c > MAVLINK_MAX_PAYLOAD_LEN
#endif
)
{
status->buffer_overrun++;
status->parse_error++;
status->msg_received = 0;
status->parse_state = MAVLINK_PARSE_STATE_IDLE;
}
else
{
// NOT counting STX, LENGTH, SEQ, SYSID, COMPID, MSGID, CRC1 and CRC2
rxmsg->len = c;
status->packet_idx = 0;
mavlink_update_checksum(rxmsg, c);
status->parse_state = MAVLINK_PARSE_STATE_GOT_LENGTH;
}
break;
case MAVLINK_PARSE_STATE_GOT_LENGTH:
rxmsg->seq = c;
mavlink_update_checksum(rxmsg, c);
status->parse_state = MAVLINK_PARSE_STATE_GOT_SEQ;
break;
case MAVLINK_PARSE_STATE_GOT_SEQ:
rxmsg->sysid = c;
mavlink_update_checksum(rxmsg, c);
status->parse_state = MAVLINK_PARSE_STATE_GOT_SYSID;
break;
case MAVLINK_PARSE_STATE_GOT_SYSID:
rxmsg->compid = c;
mavlink_update_checksum(rxmsg, c);
status->parse_state = MAVLINK_PARSE_STATE_GOT_COMPID;
break;
case MAVLINK_PARSE_STATE_GOT_COMPID:
#ifdef MAVLINK_CHECK_MESSAGE_LENGTH
if (rxmsg->len != MAVLINK_MESSAGE_LENGTH(c))
{
status->parse_error++;
status->parse_state = MAVLINK_PARSE_STATE_IDLE;
break;
}
#endif
rxmsg->msgid = c;
mavlink_update_checksum(rxmsg, c);
if (rxmsg->len == 0)
{
status->parse_state = MAVLINK_PARSE_STATE_GOT_PAYLOAD;
}
else
{
status->parse_state = MAVLINK_PARSE_STATE_GOT_MSGID;
}
break;
case MAVLINK_PARSE_STATE_GOT_MSGID:
_MAV_PAYLOAD_NON_CONST(rxmsg)[status->packet_idx++] = (char)c;
mavlink_update_checksum(rxmsg, c);
if (status->packet_idx == rxmsg->len)
{
status->parse_state = MAVLINK_PARSE_STATE_GOT_PAYLOAD;
}
break;
case MAVLINK_PARSE_STATE_GOT_PAYLOAD:
#if MAVLINK_CRC_EXTRA
mavlink_update_checksum(rxmsg, MAVLINK_MESSAGE_CRC(rxmsg->msgid));
#endif
if (c != (rxmsg->checksum & 0xFF)) {
status->parse_state = MAVLINK_PARSE_STATE_GOT_BAD_CRC1;
} else {
status->parse_state = MAVLINK_PARSE_STATE_GOT_CRC1;
}
_MAV_PAYLOAD_NON_CONST(rxmsg)[status->packet_idx] = (char)c;
break;
case MAVLINK_PARSE_STATE_GOT_CRC1:
case MAVLINK_PARSE_STATE_GOT_BAD_CRC1:
if (status->parse_state == MAVLINK_PARSE_STATE_GOT_BAD_CRC1 || c != (rxmsg->checksum >> 8)) {
// got a bad CRC message
status->msg_received = MAVLINK_FRAMING_BAD_CRC;
} else {
// Successfully got message
status->msg_received = MAVLINK_FRAMING_OK;
}
status->parse_state = MAVLINK_PARSE_STATE_IDLE;
_MAV_PAYLOAD_NON_CONST(rxmsg)[status->packet_idx+1] = (char)c;
memcpy(r_message, rxmsg, sizeof(mavlink_message_t));
break;
}
bufferIndex++;
// If a message has been sucessfully decoded, check index
if (status->msg_received == MAVLINK_FRAMING_OK)
{
//while(status->current_seq != rxmsg->seq)
//{
// status->packet_rx_drop_count++;
// status->current_seq++;
//}
status->current_rx_seq = rxmsg->seq;
// Initial condition: If no packet has been received so far, drop count is undefined
if (status->packet_rx_success_count == 0) status->packet_rx_drop_count = 0;
// Count this packet as received
status->packet_rx_success_count++;
}
r_message->len = rxmsg->len; // Provide visibility on how far we are into current msg
r_mavlink_status->parse_state = status->parse_state;
r_mavlink_status->packet_idx = status->packet_idx;
r_mavlink_status->current_rx_seq = status->current_rx_seq+1;
r_mavlink_status->packet_rx_success_count = status->packet_rx_success_count;
r_mavlink_status->packet_rx_drop_count = status->parse_error;
status->parse_error = 0;
if (status->msg_received == MAVLINK_FRAMING_BAD_CRC) {
/*
the CRC came out wrong. We now need to overwrite the
msg CRC with the one on the wire so that if the
caller decides to forward the message anyway that
mavlink_msg_to_send_buffer() won't overwrite the
checksum
*/
r_message->checksum = _MAV_PAYLOAD(rxmsg)[status->packet_idx] | (_MAV_PAYLOAD(rxmsg)[status->packet_idx+1]<<8);
}
return status->msg_received;
}
/**
* This is a convenience function which handles the complete MAVLink parsing.
* the function will parse one byte at a time and return the complete packet once
* it could be successfully decoded. This function will return 0, 1 or
* 2 (MAVLINK_FRAMING_INCOMPLETE, MAVLINK_FRAMING_OK or MAVLINK_FRAMING_BAD_CRC)
*
* Messages are parsed into an internal buffer (one for each channel). When a complete
* message is received it is copies into *returnMsg and the channel's status is
* copied into *returnStats.
*
* @param chan ID of the current channel. This allows to parse different channels with this function.
* a channel is not a physical message channel like a serial port, but a logic partition of
* the communication streams in this case. COMM_NB is the limit for the number of channels
* on MCU (e.g. ARM7), while COMM_NB_HIGH is the limit for the number of channels in Linux/Windows
* @param c The char to parse
*
* @param returnMsg NULL if no message could be decoded, the message data else
* @param returnStats if a message was decoded, this is filled with the channel's stats
* @return 0 if no message could be decoded, 1 on good message and CRC, 2 on bad CRC
*
* A typical use scenario of this function call is:
*
* @code
* #include <mavlink.h>
*
* mavlink_message_t msg;
* int chan = 0;
*
*
* while(serial.bytesAvailable > 0)
* {
* uint8_t byte = serial.getNextByte();
* if (mavlink_frame_char(chan, byte, &msg) != MAVLINK_FRAMING_INCOMPLETE)
* {
* printf("Received message with ID %d, sequence: %d from component %d of system %d", msg.msgid, msg.seq, msg.compid, msg.sysid);
* }
* }
*
*
* @endcode
*/
MAVLINK_HELPER uint8_t mavlink_frame_char(uint8_t chan, uint8_t c, mavlink_message_t* r_message, mavlink_status_t* r_mavlink_status)
{
return mavlink_frame_char_buffer(mavlink_get_channel_buffer(chan),
mavlink_get_channel_status(chan),
c,
r_message,
r_mavlink_status);
}
/**
* This is a convenience function which handles the complete MAVLink parsing.
* the function will parse one byte at a time and return the complete packet once
* it could be successfully decoded. This function will return 0 or 1.
*
* Messages are parsed into an internal buffer (one for each channel). When a complete
* message is received it is copies into *returnMsg and the channel's status is
* copied into *returnStats.
*
* @param chan ID of the current channel. This allows to parse different channels with this function.
* a channel is not a physical message channel like a serial port, but a logic partition of
* the communication streams in this case. COMM_NB is the limit for the number of channels
* on MCU (e.g. ARM7), while COMM_NB_HIGH is the limit for the number of channels in Linux/Windows
* @param c The char to parse
*
* @param returnMsg NULL if no message could be decoded, the message data else
* @param returnStats if a message was decoded, this is filled with the channel's stats
* @return 0 if no message could be decoded or bad CRC, 1 on good message and CRC
*
* A typical use scenario of this function call is:
*
* @code
* #include <mavlink.h>
*
* mavlink_message_t msg;
* int chan = 0;
*
*
* while(serial.bytesAvailable > 0)
* {
* uint8_t byte = serial.getNextByte();
* if (mavlink_parse_char(chan, byte, &msg))
* {
* printf("Received message with ID %d, sequence: %d from component %d of system %d", msg.msgid, msg.seq, msg.compid, msg.sysid);
* }
* }
*
*
* @endcode
*/
MAVLINK_HELPER uint8_t mavlink_parse_char(uint8_t chan, uint8_t c, mavlink_message_t* r_message, mavlink_status_t* r_mavlink_status)
{
uint8_t msg_received = mavlink_frame_char(chan, c, r_message, r_mavlink_status);
if (msg_received == MAVLINK_FRAMING_BAD_CRC) {
// we got a bad CRC. Treat as a parse failure
mavlink_message_t* rxmsg = mavlink_get_channel_buffer(chan);
mavlink_status_t* status = mavlink_get_channel_status(chan);
status->parse_error++;
status->msg_received = MAVLINK_FRAMING_INCOMPLETE;
status->parse_state = MAVLINK_PARSE_STATE_IDLE;
if (c == MAVLINK_STX)
{
status->parse_state = MAVLINK_PARSE_STATE_GOT_STX;
rxmsg->len = 0;
mavlink_start_checksum(rxmsg);
}
return 0;
}
return msg_received;
}
/**
* @brief Put a bitfield of length 1-32 bit into the buffer
*
* @param b the value to add, will be encoded in the bitfield
* @param bits number of bits to use to encode b, e.g. 1 for boolean, 2, 3, etc.
* @param packet_index the position in the packet (the index of the first byte to use)
* @param bit_index the position in the byte (the index of the first bit to use)
* @param buffer packet buffer to write into
* @return new position of the last used byte in the buffer
*/
MAVLINK_HELPER uint8_t put_bitfield_n_by_index(int32_t b, uint8_t bits, uint8_t packet_index, uint8_t bit_index, uint8_t* r_bit_index, uint8_t* buffer)
{
uint16_t bits_remain = bits;
// Transform number into network order
int32_t v;
uint8_t i_bit_index, i_byte_index, curr_bits_n;
#if MAVLINK_NEED_BYTE_SWAP
union {
int32_t i;
uint8_t b[4];
} bin, bout;
bin.i = b;
bout.b[0] = bin.b[3];
bout.b[1] = bin.b[2];
bout.b[2] = bin.b[1];
bout.b[3] = bin.b[0];
v = bout.i;
#else
v = b;
#endif
// buffer in
// 01100000 01000000 00000000 11110001
// buffer out
// 11110001 00000000 01000000 01100000
// Existing partly filled byte (four free slots)
// 0111xxxx
// Mask n free bits
// 00001111 = 2^0 + 2^1 + 2^2 + 2^3 = 2^n - 1
// = ((uint32_t)(1 << n)) - 1; // = 2^n - 1
// Shift n bits into the right position
// out = in >> n;
// Mask and shift bytes
i_bit_index = bit_index;
i_byte_index = packet_index;
if (bit_index > 0)
{
// If bits were available at start, they were available
// in the byte before the current index
i_byte_index--;
}
// While bits have not been packed yet
while (bits_remain > 0)
{
// Bits still have to be packed
// there can be more than 8 bits, so
// we might have to pack them into more than one byte
// First pack everything we can into the current 'open' byte
//curr_bits_n = bits_remain << 3; // Equals bits_remain mod 8
//FIXME
if (bits_remain <= (uint8_t)(8 - i_bit_index))
{
// Enough space
curr_bits_n = (uint8_t)bits_remain;
}
else
{
curr_bits_n = (8 - i_bit_index);
}
// Pack these n bits into the current byte
// Mask out whatever was at that position with ones (xxx11111)
buffer[i_byte_index] &= (0xFF >> (8 - curr_bits_n));
// Put content to this position, by masking out the non-used part
buffer[i_byte_index] |= ((0x00 << curr_bits_n) & v);
// Increment the bit index
i_bit_index += curr_bits_n;
// Now proceed to the next byte, if necessary
bits_remain -= curr_bits_n;
if (bits_remain > 0)
{
// Offer another 8 bits / one byte
i_byte_index++;
i_bit_index = 0;
}
}
*r_bit_index = i_bit_index;
// If a partly filled byte is present, mark this as consumed
if (i_bit_index != 7) i_byte_index++;
return i_byte_index - packet_index;
}
#ifdef MAVLINK_USE_CONVENIENCE_FUNCTIONS
// To make MAVLink work on your MCU, define comm_send_ch() if you wish
// to send 1 byte at a time, or MAVLINK_SEND_UART_BYTES() to send a
// whole packet at a time
/*
#include "mavlink_types.h"
void comm_send_ch(mavlink_channel_t chan, uint8_t ch)
{
if (chan == MAVLINK_COMM_0)
{
uart0_transmit(ch);
}
if (chan == MAVLINK_COMM_1)
{
uart1_transmit(ch);
}
}
*/
#include "mavlink_usart_fifo.h"
MAVLINK_HELPER void _mavlink_send_uart(mavlink_channel_t chan, const char *buf, uint16_t len)
{
serial_write_buf((uint8_t*)buf, len);
}
//MAVLINK_HELPER void _mavlink_send_uart(mavlink_channel_t chan, const char *buf, uint16_t len)
//{
//#ifdef MAVLINK_SEND_UART_BYTES
// /* this is the more efficient approach, if the platform
// defines it */
// MAVLINK_SEND_UART_BYTES(chan, (const uint8_t *)buf, len);
//#else
// /* fallback to one byte at a time */
// uint16_t i;
// for (i = 0; i < len; i++) {
// comm_send_ch(chan, (uint8_t)buf[i]);
// }
//#endif
//}
#endif // MAVLINK_USE_CONVENIENCE_FUNCTIONS
#endif /* _MAVLINK_HELPERS_H_ */
#define _MAVLINK_HELPERS_H_
#include "string.h"
#include "checksum.h"
#include "mavlink_types.h"
#include "mavlink_conversions.h"
#ifndef MAVLINK_HELPER
#define MAVLINK_HELPER
#endif
extern mavlink_system_t mavlink_system;
/*
* Internal function to give access to the channel status for each channel
*/
#ifndef MAVLINK_GET_CHANNEL_STATUS
MAVLINK_HELPER mavlink_status_t* mavlink_get_channel_status(uint8_t chan)
{
#ifdef MAVLINK_EXTERNAL_RX_STATUS
// No m_mavlink_status array defined in function,
// has to be defined externally
#else
static mavlink_status_t m_mavlink_status[MAVLINK_COMM_NUM_BUFFERS];
#endif
return &m_mavlink_status[chan];
}
#endif
/*
* Internal function to give access to the channel buffer for each channel
*/
#ifndef MAVLINK_GET_CHANNEL_BUFFER
MAVLINK_HELPER mavlink_message_t* mavlink_get_channel_buffer(uint8_t chan)
{
#ifdef MAVLINK_EXTERNAL_RX_BUFFER
// No m_mavlink_buffer array defined in function,
// has to be defined externally
#else
static mavlink_message_t m_mavlink_buffer[MAVLINK_COMM_NUM_BUFFERS];
#endif
return &m_mavlink_buffer[chan];
}
#endif
/**
* @brief Reset the status of a channel.
*/
MAVLINK_HELPER void mavlink_reset_channel_status(uint8_t chan)
{
mavlink_status_t *status = mavlink_get_channel_status(chan);
status->parse_state = MAVLINK_PARSE_STATE_IDLE;
}
/**
* @brief Finalize a MAVLink message with channel assignment
*
* This function calculates the checksum and sets length and aircraft id correctly.
* It assumes that the message id and the payload are already correctly set. This function
* can also be used if the message header has already been written before (as in mavlink_msg_xxx_pack
* instead of mavlink_msg_xxx_pack_headerless), it just introduces little extra overhead.
*
* @param msg Message to finalize
* @param system_id Id of the sending (this) system, 1-127
* @param length Message length
*/
#if MAVLINK_CRC_EXTRA
MAVLINK_HELPER uint16_t mavlink_finalize_message_chan(mavlink_message_t* msg, uint8_t system_id, uint8_t component_id,
uint8_t chan, uint8_t min_length, uint8_t length, uint8_t crc_extra)
#else
MAVLINK_HELPER uint16_t mavlink_finalize_message_chan(mavlink_message_t* msg, uint8_t system_id, uint8_t component_id,
uint8_t chan, uint8_t length)
#endif
{
// This is only used for the v2 protocol and we silence it here
(void)min_length;
// This code part is the same for all messages;
msg->magic = MAVLINK_STX;
msg->len = length;
msg->sysid = system_id;
msg->compid = component_id;
// One sequence number per channel
msg->seq = mavlink_get_channel_status(chan)->current_tx_seq;
mavlink_get_channel_status(chan)->current_tx_seq = mavlink_get_channel_status(chan)->current_tx_seq+1;
msg->checksum = crc_calculate(((const uint8_t*)(msg)) + 3, MAVLINK_CORE_HEADER_LEN);
crc_accumulate_buffer(&msg->checksum, _MAV_PAYLOAD(msg), msg->len);
#if MAVLINK_CRC_EXTRA
crc_accumulate(crc_extra, &msg->checksum);
#endif
mavlink_ck_a(msg) = (uint8_t)(msg->checksum & 0xFF);
mavlink_ck_b(msg) = (uint8_t)(msg->checksum >> 8);
return length + MAVLINK_NUM_NON_PAYLOAD_BYTES;
}
/**
* @brief Finalize a MAVLink message with MAVLINK_COMM_0 as default channel
*/
#if MAVLINK_CRC_EXTRA
MAVLINK_HELPER uint16_t mavlink_finalize_message(mavlink_message_t* msg, uint8_t system_id, uint8_t component_id,
uint8_t min_length, uint8_t length, uint8_t crc_extra)
{
return mavlink_finalize_message_chan(msg, system_id, component_id, MAVLINK_COMM_0, min_length, length, crc_extra);
}
#else
MAVLINK_HELPER uint16_t mavlink_finalize_message(mavlink_message_t* msg, uint8_t system_id, uint8_t component_id,
uint8_t length)
{
return mavlink_finalize_message_chan(msg, system_id, component_id, MAVLINK_COMM_0, length);
}
#endif
#ifdef MAVLINK_USE_CONVENIENCE_FUNCTIONS
MAVLINK_HELPER void _mavlink_send_uart(mavlink_channel_t chan, const char *buf, uint16_t len);
/**
* @brief Finalize a MAVLink message with channel assignment and send
*/
#if MAVLINK_CRC_EXTRA
MAVLINK_HELPER void _mav_finalize_message_chan_send(mavlink_channel_t chan, uint8_t msgid, const char *packet,
uint8_t min_length, uint8_t length, uint8_t crc_extra)
#else
MAVLINK_HELPER void _mav_finalize_message_chan_send(mavlink_channel_t chan, uint8_t msgid, const char *packet, uint8_t length)
#endif
{
uint16_t checksum;
uint8_t buf[MAVLINK_NUM_HEADER_BYTES];
uint8_t ck[2];
mavlink_status_t *status = mavlink_get_channel_status(chan);
buf[0] = MAVLINK_STX;
buf[1] = length;
buf[2] = status->current_tx_seq;
buf[3] = mavlink_system.sysid;
buf[4] = mavlink_system.compid;
buf[5] = msgid;
status->current_tx_seq++;
checksum = crc_calculate((const uint8_t*)&buf[1], MAVLINK_CORE_HEADER_LEN);
crc_accumulate_buffer(&checksum, packet, length);
#if MAVLINK_CRC_EXTRA
crc_accumulate(crc_extra, &checksum);
#endif
ck[0] = (uint8_t)(checksum & 0xFF);
ck[1] = (uint8_t)(checksum >> 8);
MAVLINK_START_UART_SEND(chan, MAVLINK_NUM_NON_PAYLOAD_BYTES + (uint16_t)length);
_mavlink_send_uart(chan, (const char *)buf, MAVLINK_NUM_HEADER_BYTES);
_mavlink_send_uart(chan, packet, length);
_mavlink_send_uart(chan, (const char *)ck, 2);
MAVLINK_END_UART_SEND(chan, MAVLINK_NUM_NON_PAYLOAD_BYTES + (uint16_t)length);
}
/**
* @brief re-send a message over a uart channel
* this is more stack efficient than re-marshalling the message
*/
MAVLINK_HELPER void _mavlink_resend_uart(mavlink_channel_t chan, const mavlink_message_t *msg)
{
uint8_t ck[2];
ck[0] = (uint8_t)(msg->checksum & 0xFF);
ck[1] = (uint8_t)(msg->checksum >> 8);
// XXX use the right sequence here
MAVLINK_START_UART_SEND(chan, MAVLINK_NUM_NON_PAYLOAD_BYTES + msg->len);
_mavlink_send_uart(chan, (const char *)&msg->magic, MAVLINK_NUM_HEADER_BYTES);
_mavlink_send_uart(chan, _MAV_PAYLOAD(msg), msg->len);
_mavlink_send_uart(chan, (const char *)ck, 2);
MAVLINK_END_UART_SEND(chan, MAVLINK_NUM_NON_PAYLOAD_BYTES + msg->len);
}
#endif // MAVLINK_USE_CONVENIENCE_FUNCTIONS
/**
* @brief Pack a message to send it over a serial byte stream
*/
MAVLINK_HELPER uint16_t mavlink_msg_to_send_buffer(uint8_t *buffer, const mavlink_message_t *msg)
{
uint8_t *ck;
memcpy(buffer, (const uint8_t *)&msg->magic, MAVLINK_NUM_HEADER_BYTES + (uint16_t)msg->len);
ck = buffer + (MAVLINK_NUM_HEADER_BYTES + (uint16_t)msg->len);
ck[0] = (uint8_t)(msg->checksum & 0xFF);
ck[1] = (uint8_t)(msg->checksum >> 8);
return MAVLINK_NUM_NON_PAYLOAD_BYTES + (uint16_t)msg->len;
}
union __mavlink_bitfield {
uint8_t uint8;
int8_t int8;
uint16_t uint16;
int16_t int16;
uint32_t uint32;
int32_t int32;
};
MAVLINK_HELPER void mavlink_start_checksum(mavlink_message_t* msg)
{
crc_init(&msg->checksum);
}
MAVLINK_HELPER void mavlink_update_checksum(mavlink_message_t* msg, uint8_t c)
{
crc_accumulate(c, &msg->checksum);
}
/**
* This is a varient of mavlink_frame_char() but with caller supplied
* parsing buffers. It is useful when you want to create a MAVLink
* parser in a library that doesn't use any global variables
*
* @param rxmsg parsing message buffer
* @param status parsing starus buffer
* @param c The char to parse
*
* @param returnMsg NULL if no message could be decoded, the message data else
* @param returnStats if a message was decoded, this is filled with the channel's stats
* @return 0 if no message could be decoded, 1 on good message and CRC, 2 on bad CRC
*
* A typical use scenario of this function call is:
*
* @code
* #include <mavlink.h>
*
* mavlink_message_t msg;
* int chan = 0;
*
*
* while(serial.bytesAvailable > 0)
* {
* uint8_t byte = serial.getNextByte();
* if (mavlink_frame_char(chan, byte, &msg) != MAVLINK_FRAMING_INCOMPLETE)
* {
* printf("Received message with ID %d, sequence: %d from component %d of system %d", msg.msgid, msg.seq, msg.compid, msg.sysid);
* }
* }
*
*
* @endcode
*/
MAVLINK_HELPER uint8_t mavlink_frame_char_buffer(mavlink_message_t* rxmsg,
mavlink_status_t* status,
uint8_t c,
mavlink_message_t* r_message,
mavlink_status_t* r_mavlink_status)
{
/*
default message crc function. You can override this per-system to
put this data in a different memory segment
*/
#if MAVLINK_CRC_EXTRA
#ifndef MAVLINK_MESSAGE_CRC
static const uint8_t mavlink_message_crcs[256] = MAVLINK_MESSAGE_CRCS;
#define MAVLINK_MESSAGE_CRC(msgid) mavlink_message_crcs[msgid]
#endif
#endif
/* Enable this option to check the length of each message.
This allows invalid messages to be caught much sooner. Use if the transmission
medium is prone to missing (or extra) characters (e.g. a radio that fades in
and out). Only use if the channel will only contain messages types listed in
the headers.
*/
#ifdef MAVLINK_CHECK_MESSAGE_LENGTH
#ifndef MAVLINK_MESSAGE_LENGTH
static const uint8_t mavlink_message_lengths[256] = MAVLINK_MESSAGE_LENGTHS;
#define MAVLINK_MESSAGE_LENGTH(msgid) mavlink_message_lengths[msgid]
#endif
#endif
int bufferIndex = 0;
status->msg_received = MAVLINK_FRAMING_INCOMPLETE;
switch (status->parse_state)
{
case MAVLINK_PARSE_STATE_UNINIT:
case MAVLINK_PARSE_STATE_IDLE:
if (c == MAVLINK_STX)
{
status->parse_state = MAVLINK_PARSE_STATE_GOT_STX;
rxmsg->len = 0;
rxmsg->magic = c;
mavlink_start_checksum(rxmsg);
}
break;
case MAVLINK_PARSE_STATE_GOT_STX:
if (status->msg_received
/* Support shorter buffers than the
default maximum packet size */
#if (MAVLINK_MAX_PAYLOAD_LEN < 255)
|| c > MAVLINK_MAX_PAYLOAD_LEN
#endif
)
{
status->buffer_overrun++;
status->parse_error++;
status->msg_received = 0;
status->parse_state = MAVLINK_PARSE_STATE_IDLE;
}
else
{
// NOT counting STX, LENGTH, SEQ, SYSID, COMPID, MSGID, CRC1 and CRC2
rxmsg->len = c;
status->packet_idx = 0;
mavlink_update_checksum(rxmsg, c);
status->parse_state = MAVLINK_PARSE_STATE_GOT_LENGTH;
}
break;
case MAVLINK_PARSE_STATE_GOT_LENGTH:
rxmsg->seq = c;
mavlink_update_checksum(rxmsg, c);
status->parse_state = MAVLINK_PARSE_STATE_GOT_SEQ;
break;
case MAVLINK_PARSE_STATE_GOT_SEQ:
rxmsg->sysid = c;
mavlink_update_checksum(rxmsg, c);
status->parse_state = MAVLINK_PARSE_STATE_GOT_SYSID;
break;
case MAVLINK_PARSE_STATE_GOT_SYSID:
rxmsg->compid = c;
mavlink_update_checksum(rxmsg, c);
status->parse_state = MAVLINK_PARSE_STATE_GOT_COMPID;
break;
case MAVLINK_PARSE_STATE_GOT_COMPID:
#ifdef MAVLINK_CHECK_MESSAGE_LENGTH
if (rxmsg->len != MAVLINK_MESSAGE_LENGTH(c))
{
status->parse_error++;
status->parse_state = MAVLINK_PARSE_STATE_IDLE;
break;
}
#endif
rxmsg->msgid = c;
mavlink_update_checksum(rxmsg, c);
if (rxmsg->len == 0)
{
status->parse_state = MAVLINK_PARSE_STATE_GOT_PAYLOAD;
}
else
{
status->parse_state = MAVLINK_PARSE_STATE_GOT_MSGID;
}
break;
case MAVLINK_PARSE_STATE_GOT_MSGID:
_MAV_PAYLOAD_NON_CONST(rxmsg)[status->packet_idx++] = (char)c;
mavlink_update_checksum(rxmsg, c);
if (status->packet_idx == rxmsg->len)
{
status->parse_state = MAVLINK_PARSE_STATE_GOT_PAYLOAD;
}
break;
case MAVLINK_PARSE_STATE_GOT_PAYLOAD:
#if MAVLINK_CRC_EXTRA
mavlink_update_checksum(rxmsg, MAVLINK_MESSAGE_CRC(rxmsg->msgid));
#endif
if (c != (rxmsg->checksum & 0xFF)) {
status->parse_state = MAVLINK_PARSE_STATE_GOT_BAD_CRC1;
} else {
status->parse_state = MAVLINK_PARSE_STATE_GOT_CRC1;
}
_MAV_PAYLOAD_NON_CONST(rxmsg)[status->packet_idx] = (char)c;
break;
case MAVLINK_PARSE_STATE_GOT_CRC1:
case MAVLINK_PARSE_STATE_GOT_BAD_CRC1:
if (status->parse_state == MAVLINK_PARSE_STATE_GOT_BAD_CRC1 || c != (rxmsg->checksum >> 8)) {
// got a bad CRC message
status->msg_received = MAVLINK_FRAMING_BAD_CRC;
} else {
// Successfully got message
status->msg_received = MAVLINK_FRAMING_OK;
}
status->parse_state = MAVLINK_PARSE_STATE_IDLE;
_MAV_PAYLOAD_NON_CONST(rxmsg)[status->packet_idx+1] = (char)c;
memcpy(r_message, rxmsg, sizeof(mavlink_message_t));
break;
}
bufferIndex++;
// If a message has been sucessfully decoded, check index
if (status->msg_received == MAVLINK_FRAMING_OK)
{
//while(status->current_seq != rxmsg->seq)
//{
// status->packet_rx_drop_count++;
// status->current_seq++;
//}
status->current_rx_seq = rxmsg->seq;
// Initial condition: If no packet has been received so far, drop count is undefined
if (status->packet_rx_success_count == 0) status->packet_rx_drop_count = 0;
// Count this packet as received
status->packet_rx_success_count++;
}
r_message->len = rxmsg->len; // Provide visibility on how far we are into current msg
r_mavlink_status->parse_state = status->parse_state;
r_mavlink_status->packet_idx = status->packet_idx;
r_mavlink_status->current_rx_seq = status->current_rx_seq+1;
r_mavlink_status->packet_rx_success_count = status->packet_rx_success_count;
r_mavlink_status->packet_rx_drop_count = status->parse_error;
status->parse_error = 0;
if (status->msg_received == MAVLINK_FRAMING_BAD_CRC) {
/*
the CRC came out wrong. We now need to overwrite the
msg CRC with the one on the wire so that if the
caller decides to forward the message anyway that
mavlink_msg_to_send_buffer() won't overwrite the
checksum
*/
r_message->checksum = _MAV_PAYLOAD(rxmsg)[status->packet_idx] | (_MAV_PAYLOAD(rxmsg)[status->packet_idx+1]<<8);
}
return status->msg_received;
}
/**
* This is a convenience function which handles the complete MAVLink parsing.
* the function will parse one byte at a time and return the complete packet once
* it could be successfully decoded. This function will return 0, 1 or
* 2 (MAVLINK_FRAMING_INCOMPLETE, MAVLINK_FRAMING_OK or MAVLINK_FRAMING_BAD_CRC)
*
* Messages are parsed into an internal buffer (one for each channel). When a complete
* message is received it is copies into *returnMsg and the channel's status is
* copied into *returnStats.
*
* @param chan ID of the current channel. This allows to parse different channels with this function.
* a channel is not a physical message channel like a serial port, but a logic partition of
* the communication streams in this case. COMM_NB is the limit for the number of channels
* on MCU (e.g. ARM7), while COMM_NB_HIGH is the limit for the number of channels in Linux/Windows
* @param c The char to parse
*
* @param returnMsg NULL if no message could be decoded, the message data else
* @param returnStats if a message was decoded, this is filled with the channel's stats
* @return 0 if no message could be decoded, 1 on good message and CRC, 2 on bad CRC
*
* A typical use scenario of this function call is:
*
* @code
* #include <mavlink.h>
*
* mavlink_message_t msg;
* int chan = 0;
*
*
* while(serial.bytesAvailable > 0)
* {
* uint8_t byte = serial.getNextByte();
* if (mavlink_frame_char(chan, byte, &msg) != MAVLINK_FRAMING_INCOMPLETE)
* {
* printf("Received message with ID %d, sequence: %d from component %d of system %d", msg.msgid, msg.seq, msg.compid, msg.sysid);
* }
* }
*
*
* @endcode
*/
MAVLINK_HELPER uint8_t mavlink_frame_char(uint8_t chan, uint8_t c, mavlink_message_t* r_message, mavlink_status_t* r_mavlink_status)
{
return mavlink_frame_char_buffer(mavlink_get_channel_buffer(chan),
mavlink_get_channel_status(chan),
c,
r_message,
r_mavlink_status);
}
/**
* This is a convenience function which handles the complete MAVLink parsing.
* the function will parse one byte at a time and return the complete packet once
* it could be successfully decoded. This function will return 0 or 1.
*
* Messages are parsed into an internal buffer (one for each channel). When a complete
* message is received it is copies into *returnMsg and the channel's status is
* copied into *returnStats.
*
* @param chan ID of the current channel. This allows to parse different channels with this function.
* a channel is not a physical message channel like a serial port, but a logic partition of
* the communication streams in this case. COMM_NB is the limit for the number of channels
* on MCU (e.g. ARM7), while COMM_NB_HIGH is the limit for the number of channels in Linux/Windows
* @param c The char to parse
*
* @param returnMsg NULL if no message could be decoded, the message data else
* @param returnStats if a message was decoded, this is filled with the channel's stats
* @return 0 if no message could be decoded or bad CRC, 1 on good message and CRC
*
* A typical use scenario of this function call is:
*
* @code
* #include <mavlink.h>
*
* mavlink_message_t msg;
* int chan = 0;
*
*
* while(serial.bytesAvailable > 0)
* {
* uint8_t byte = serial.getNextByte();
* if (mavlink_parse_char(chan, byte, &msg))
* {
* printf("Received message with ID %d, sequence: %d from component %d of system %d", msg.msgid, msg.seq, msg.compid, msg.sysid);
* }
* }
*
*
* @endcode
*/
MAVLINK_HELPER uint8_t mavlink_parse_char(uint8_t chan, uint8_t c, mavlink_message_t* r_message, mavlink_status_t* r_mavlink_status)
{
uint8_t msg_received = mavlink_frame_char(chan, c, r_message, r_mavlink_status);
if (msg_received == MAVLINK_FRAMING_BAD_CRC) {
// we got a bad CRC. Treat as a parse failure
mavlink_message_t* rxmsg = mavlink_get_channel_buffer(chan);
mavlink_status_t* status = mavlink_get_channel_status(chan);
status->parse_error++;
status->msg_received = MAVLINK_FRAMING_INCOMPLETE;
status->parse_state = MAVLINK_PARSE_STATE_IDLE;
if (c == MAVLINK_STX)
{
status->parse_state = MAVLINK_PARSE_STATE_GOT_STX;
rxmsg->len = 0;
mavlink_start_checksum(rxmsg);
}
return 0;
}
return msg_received;
}
/**
* @brief Put a bitfield of length 1-32 bit into the buffer
*
* @param b the value to add, will be encoded in the bitfield
* @param bits number of bits to use to encode b, e.g. 1 for boolean, 2, 3, etc.
* @param packet_index the position in the packet (the index of the first byte to use)
* @param bit_index the position in the byte (the index of the first bit to use)
* @param buffer packet buffer to write into
* @return new position of the last used byte in the buffer
*/
MAVLINK_HELPER uint8_t put_bitfield_n_by_index(int32_t b, uint8_t bits, uint8_t packet_index, uint8_t bit_index, uint8_t* r_bit_index, uint8_t* buffer)
{
uint16_t bits_remain = bits;
// Transform number into network order
int32_t v;
uint8_t i_bit_index, i_byte_index, curr_bits_n;
#if MAVLINK_NEED_BYTE_SWAP
union {
int32_t i;
uint8_t b[4];
} bin, bout;
bin.i = b;
bout.b[0] = bin.b[3];
bout.b[1] = bin.b[2];
bout.b[2] = bin.b[1];
bout.b[3] = bin.b[0];
v = bout.i;
#else
v = b;
#endif
// buffer in
// 01100000 01000000 00000000 11110001
// buffer out
// 11110001 00000000 01000000 01100000
// Existing partly filled byte (four free slots)
// 0111xxxx
// Mask n free bits
// 00001111 = 2^0 + 2^1 + 2^2 + 2^3 = 2^n - 1
// = ((uint32_t)(1 << n)) - 1; // = 2^n - 1
// Shift n bits into the right position
// out = in >> n;
// Mask and shift bytes
i_bit_index = bit_index;
i_byte_index = packet_index;
if (bit_index > 0)
{
// If bits were available at start, they were available
// in the byte before the current index
i_byte_index--;
}
// While bits have not been packed yet
while (bits_remain > 0)
{
// Bits still have to be packed
// there can be more than 8 bits, so
// we might have to pack them into more than one byte
// First pack everything we can into the current 'open' byte
//curr_bits_n = bits_remain << 3; // Equals bits_remain mod 8
//FIXME
if (bits_remain <= (uint8_t)(8 - i_bit_index))
{
// Enough space
curr_bits_n = (uint8_t)bits_remain;
}
else
{
curr_bits_n = (8 - i_bit_index);
}
// Pack these n bits into the current byte
// Mask out whatever was at that position with ones (xxx11111)
buffer[i_byte_index] &= (0xFF >> (8 - curr_bits_n));
// Put content to this position, by masking out the non-used part
buffer[i_byte_index] |= ((0x00 << curr_bits_n) & v);
// Increment the bit index
i_bit_index += curr_bits_n;
// Now proceed to the next byte, if necessary
bits_remain -= curr_bits_n;
if (bits_remain > 0)
{
// Offer another 8 bits / one byte
i_byte_index++;
i_bit_index = 0;
}
}
*r_bit_index = i_bit_index;
// If a partly filled byte is present, mark this as consumed
if (i_bit_index != 7) i_byte_index++;
return i_byte_index - packet_index;
}
#ifdef MAVLINK_USE_CONVENIENCE_FUNCTIONS
// To make MAVLink work on your MCU, define comm_send_ch() if you wish
// to send 1 byte at a time, or MAVLINK_SEND_UART_BYTES() to send a
// whole packet at a time
/*
#include "mavlink_types.h"
void comm_send_ch(mavlink_channel_t chan, uint8_t ch)
{
if (chan == MAVLINK_COMM_0)
{
uart0_transmit(ch);
}
if (chan == MAVLINK_COMM_1)
{
uart1_transmit(ch);
}
}
*/
#include "mavlink_usart_fifo.h"
MAVLINK_HELPER void _mavlink_send_uart(mavlink_channel_t chan, const char *buf, uint16_t len)
{
serial_write_buf((uint8_t*)buf, len);
}
//MAVLINK_HELPER void _mavlink_send_uart(mavlink_channel_t chan, const char *buf, uint16_t len)
//{
//#ifdef MAVLINK_SEND_UART_BYTES
// /* this is the more efficient approach, if the platform
// defines it */
// MAVLINK_SEND_UART_BYTES(chan, (const uint8_t *)buf, len);
//#else
// /* fallback to one byte at a time */
// uint16_t i;
// for (i = 0; i < len; i++) {
// comm_send_ch(chan, (uint8_t)buf[i]);
// }
//#endif
//}
#endif // MAVLINK_USE_CONVENIENCE_FUNCTIONS
#endif /* _MAVLINK_HELPERS_H_ */
8.checksum未经任何修改(为了大家方便看,附上全代码)
checksum.h如下#ifdef __cplusplus//作者:恒久力行 qq:624668529
extern "C" {
#endif
#ifndef _CHECKSUM_H_
#define _CHECKSUM_H_
// Visual Studio versions before 2010 don't have stdint.h, so we just error out.
#if (defined _MSC_VER) && (_MSC_VER < 1600)
#error "The C-MAVLink implementation requires Visual Studio 2010 or greater"
#endif
#include <stdint.h>
/**
*
* CALCULATE THE CHECKSUM
*
*/
#define X25_INIT_CRC 0xffff
#define X25_VALIDATE_CRC 0xf0b8
#ifndef HAVE_CRC_ACCUMULATE
/**
* @brief Accumulate the X.25 CRC by adding one char at a time.
*
* The checksum function adds the hash of one char at a time to the
* 16 bit checksum (uint16_t).
*
* @param data new char to hash
* @param crcAccum the already accumulated checksum
**/
static inline void crc_accumulate(uint8_t data, uint16_t *crcAccum)
{
/*Accumulate one byte of data into the CRC*/
uint8_t tmp;
tmp = data ^ (uint8_t)(*crcAccum &0xff);
tmp ^= (tmp<<4);
*crcAccum = (*crcAccum>>8) ^ (tmp<<8) ^ (tmp <<3) ^ (tmp>>4);
}
#endif
/**
* @brief Initiliaze the buffer for the X.25 CRC
*
* @param crcAccum the 16 bit X.25 CRC
*/
static inline void crc_init(uint16_t* crcAccum)
{
*crcAccum = X25_INIT_CRC;
}
/**
* @brief Calculates the X.25 checksum on a byte buffer
*
* @param pBuffer buffer containing the byte array to hash
* @param length length of the byte array
* @return the checksum over the buffer bytes
**/
static inline uint16_t crc_calculate(const uint8_t* pBuffer, uint16_t length)
{
uint16_t crcTmp;
crc_init(&crcTmp);
while (length--) {
crc_accumulate(*pBuffer++, &crcTmp);
}
return crcTmp;
}
/**
* @brief Accumulate the X.25 CRC by adding an array of bytes
*
* The checksum function adds the hash of one char at a time to the
* 16 bit checksum (uint16_t).
*
* @param data new bytes to hash
* @param crcAccum the already accumulated checksum
**/
static inline void crc_accumulate_buffer(uint16_t *crcAccum, const char *pBuffer, uint16_t length)
{
const uint8_t *p = (const uint8_t *)pBuffer;
while (length--) {
crc_accumulate(*p++, crcAccum);
}
}
#endif /* _CHECKSUM_H_ */
#ifdef __cplusplus
}
#endif
extern "C" {
#endif
#ifndef _CHECKSUM_H_
#define _CHECKSUM_H_
// Visual Studio versions before 2010 don't have stdint.h, so we just error out.
#if (defined _MSC_VER) && (_MSC_VER < 1600)
#error "The C-MAVLink implementation requires Visual Studio 2010 or greater"
#endif
#include <stdint.h>
/**
*
* CALCULATE THE CHECKSUM
*
*/
#define X25_INIT_CRC 0xffff
#define X25_VALIDATE_CRC 0xf0b8
#ifndef HAVE_CRC_ACCUMULATE
/**
* @brief Accumulate the X.25 CRC by adding one char at a time.
*
* The checksum function adds the hash of one char at a time to the
* 16 bit checksum (uint16_t).
*
* @param data new char to hash
* @param crcAccum the already accumulated checksum
**/
static inline void crc_accumulate(uint8_t data, uint16_t *crcAccum)
{
/*Accumulate one byte of data into the CRC*/
uint8_t tmp;
tmp = data ^ (uint8_t)(*crcAccum &0xff);
tmp ^= (tmp<<4);
*crcAccum = (*crcAccum>>8) ^ (tmp<<8) ^ (tmp <<3) ^ (tmp>>4);
}
#endif
/**
* @brief Initiliaze the buffer for the X.25 CRC
*
* @param crcAccum the 16 bit X.25 CRC
*/
static inline void crc_init(uint16_t* crcAccum)
{
*crcAccum = X25_INIT_CRC;
}
/**
* @brief Calculates the X.25 checksum on a byte buffer
*
* @param pBuffer buffer containing the byte array to hash
* @param length length of the byte array
* @return the checksum over the buffer bytes
**/
static inline uint16_t crc_calculate(const uint8_t* pBuffer, uint16_t length)
{
uint16_t crcTmp;
crc_init(&crcTmp);
while (length--) {
crc_accumulate(*pBuffer++, &crcTmp);
}
return crcTmp;
}
/**
* @brief Accumulate the X.25 CRC by adding an array of bytes
*
* The checksum function adds the hash of one char at a time to the
* 16 bit checksum (uint16_t).
*
* @param data new bytes to hash
* @param crcAccum the already accumulated checksum
**/
static inline void crc_accumulate_buffer(uint16_t *crcAccum, const char *pBuffer, uint16_t length)
{
const uint8_t *p = (const uint8_t *)pBuffer;
while (length--) {
crc_accumulate(*p++, crcAccum);
}
}
#endif /* _CHECKSUM_H_ */
#ifdef __cplusplus
}
#endif
9.mavlink_conversions.h修改了一个地方就是将参数定义提到了前面)
(就是这个函数MAVLINK_HELPERvoid mavlink_dcm_to_quaternion(constfloat dcm[3][3],float quaternion[4])mavlink_conversions.h全代码
#ifndef _MAVLINK_CONVERSIONS_H_//作者:恒久力行 qq:624668529
#define _MAVLINK_CONVERSIONS_H_
/* enable math defines on Windows */
#ifdef _MSC_VER
#ifndef _USE_MATH_DEFINES
#define _USE_MATH_DEFINES
#endif
#endif
#include <math.h>
#ifndef M_PI_2
#define M_PI_2 ((float)asin(1))
#endif
/**
* @file mavlink_conversions.h
*
* These conversion functions follow the NASA rotation standards definition file
* available online.
*
* Their intent is to lower the barrier for MAVLink adopters to use gimbal-lock free
* (both rotation matrices, sometimes called DCM, and quaternions are gimbal-lock free)
* rotation representations. Euler angles (roll, pitch, yaw) will be phased out of the
* protocol as widely as possible.
*
* @author James Goppert
* @author Thomas Gubler <thomasgubler@gmail.com>
*/
/**
* Converts a quaternion to a rotation matrix
*
* @param quaternion a [w, x, y, z] ordered quaternion (null-rotation being 1 0 0 0)
* @param dcm a 3x3 rotation matrix
*/
MAVLINK_HELPER void mavlink_quaternion_to_dcm(const float quaternion[4], float dcm[3][3])
{
double a = quaternion[0];
double b = quaternion[1];
double c = quaternion[2];
double d = quaternion[3];
double aSq = a * a;
double bSq = b * b;
double cSq = c * c;
double dSq = d * d;
dcm[0][0] = aSq + bSq - cSq - dSq;
dcm[0][1] = 2 * (b * c - a * d);
dcm[0][2] = 2 * (a * c + b * d);
dcm[1][0] = 2 * (b * c + a * d);
dcm[1][1] = aSq - bSq + cSq - dSq;
dcm[1][2] = 2 * (c * d - a * b);
dcm[2][0] = 2 * (b * d - a * c);
dcm[2][1] = 2 * (a * b + c * d);
dcm[2][2] = aSq - bSq - cSq + dSq;
}
/**
* Converts a rotation matrix to euler angles
*
* @param dcm a 3x3 rotation matrix
* @param roll the roll angle in radians
* @param pitch the pitch angle in radians
* @param yaw the yaw angle in radians
*/
MAVLINK_HELPER void mavlink_dcm_to_euler(const float dcm[3][3], float* roll, float* pitch, float* yaw)
{
float phi, theta, psi;
theta = asin(-dcm[2][0]);
if (fabsf(theta - (float)M_PI_2) < 1.0e-3f) {
phi = 0.0f;
psi = (atan2f(dcm[1][2] - dcm[0][1],
dcm[0][2] + dcm[1][1]) + phi);
} else if (fabsf(theta + (float)M_PI_2) < 1.0e-3f) {
phi = 0.0f;
psi = atan2f(dcm[1][2] - dcm[0][1],
dcm[0][2] + dcm[1][1] - phi);
} else {
phi = atan2f(dcm[2][1], dcm[2][2]);
psi = atan2f(dcm[1][0], dcm[0][0]);
}
*roll = phi;
*pitch = theta;
*yaw = psi;
}
/**
* Converts a quaternion to euler angles
*
* @param quaternion a [w, x, y, z] ordered quaternion (null-rotation being 1 0 0 0)
* @param roll the roll angle in radians
* @param pitch the pitch angle in radians
* @param yaw the yaw angle in radians
*/
MAVLINK_HELPER void mavlink_quaternion_to_euler(const float quaternion[4], float* roll, float* pitch, float* yaw)
{
float dcm[3][3];
mavlink_quaternion_to_dcm(quaternion, dcm);
mavlink_dcm_to_euler((const float(*)[3])dcm, roll, pitch, yaw);
}
/**
* Converts euler angles to a quaternion
*
* @param roll the roll angle in radians
* @param pitch the pitch angle in radians
* @param yaw the yaw angle in radians
* @param quaternion a [w, x, y, z] ordered quaternion (null-rotation being 1 0 0 0)
*/
MAVLINK_HELPER void mavlink_euler_to_quaternion(float roll, float pitch, float yaw, float quaternion[4])
{
float cosPhi_2 = cosf(roll / 2);
float sinPhi_2 = sinf(roll / 2);
float cosTheta_2 = cosf(pitch / 2);
float sinTheta_2 = sinf(pitch / 2);
float cosPsi_2 = cosf(yaw / 2);
float sinPsi_2 = sinf(yaw / 2);
quaternion[0] = (cosPhi_2 * cosTheta_2 * cosPsi_2 +
sinPhi_2 * sinTheta_2 * sinPsi_2);
quaternion[1] = (sinPhi_2 * cosTheta_2 * cosPsi_2 -
cosPhi_2 * sinTheta_2 * sinPsi_2);
quaternion[2] = (cosPhi_2 * sinTheta_2 * cosPsi_2 +
sinPhi_2 * cosTheta_2 * sinPsi_2);
quaternion[3] = (cosPhi_2 * cosTheta_2 * sinPsi_2 -
sinPhi_2 * sinTheta_2 * cosPsi_2);
}
/**
* Converts a rotation matrix to a quaternion
* Reference:
* - Shoemake, Quaternions,
* http://www.cs.ucr.edu/~vbz/resources/quatut.pdf
*
* @param dcm a 3x3 rotation matrix
* @param quaternion a [w, x, y, z] ordered quaternion (null-rotation being 1 0 0 0)
*/
MAVLINK_HELPER void mavlink_dcm_to_quaternion(const float dcm[3][3], float quaternion[4])
{
int dcm_j,dcm_k;
float s;
float tr = dcm[0][0] + dcm[1][1] + dcm[2][2];
if (tr > 0.0f) {
float s = sqrtf(tr + 1.0f);
quaternion[0] = s * 0.5f;
s = 0.5f / s;
quaternion[1] = (dcm[2][1] - dcm[1][2]) * s;
quaternion[2] = (dcm[0][2] - dcm[2][0]) * s;
quaternion[3] = (dcm[1][0] - dcm[0][1]) * s;
} else {
/* Find maximum diagonal element in dcm
* store index in dcm_i */
int dcm_i = 0;
int i;
for (i = 1; i < 3; i++) {
if (dcm[i][i] > dcm[dcm_i][dcm_i]) {
dcm_i = i;
}
}
dcm_j = (dcm_i + 1) % 3;
dcm_k = (dcm_i + 2) % 3;
s = sqrtf((dcm[dcm_i][dcm_i] - dcm[dcm_j][dcm_j] -
dcm[dcm_k][dcm_k]) + 1.0f);
quaternion[dcm_i + 1] = s * 0.5f;
s = 0.5f / s;
quaternion[dcm_j + 1] = (dcm[dcm_i][dcm_j] + dcm[dcm_j][dcm_i]) * s;
quaternion[dcm_k + 1] = (dcm[dcm_k][dcm_i] + dcm[dcm_i][dcm_k]) * s;
quaternion[0] = (dcm[dcm_k][dcm_j] - dcm[dcm_j][dcm_k]) * s;
}
}
/**
* Converts euler angles to a rotation matrix
*
* @param roll the roll angle in radians
* @param pitch the pitch angle in radians
* @param yaw the yaw angle in radians
* @param dcm a 3x3 rotation matrix
*/
MAVLINK_HELPER void mavlink_euler_to_dcm(float roll, float pitch, float yaw, float dcm[3][3])
{
float cosPhi = cosf(roll);
float sinPhi = sinf(roll);
float cosThe = cosf(pitch);
float sinThe = sinf(pitch);
float cosPsi = cosf(yaw);
float sinPsi = sinf(yaw);
dcm[0][0] = cosThe * cosPsi;
dcm[0][1] = -cosPhi * sinPsi + sinPhi * sinThe * cosPsi;
dcm[0][2] = sinPhi * sinPsi + cosPhi * sinThe * cosPsi;
dcm[1][0] = cosThe * sinPsi;
dcm[1][1] = cosPhi * cosPsi + sinPhi * sinThe * sinPsi;
dcm[1][2] = -sinPhi * cosPsi + cosPhi * sinThe * sinPsi;
dcm[2][0] = -sinThe;
dcm[2][1] = sinPhi * cosThe;
dcm[2][2] = cosPhi * cosThe;
}
#endif
#define _MAVLINK_CONVERSIONS_H_
/* enable math defines on Windows */
#ifdef _MSC_VER
#ifndef _USE_MATH_DEFINES
#define _USE_MATH_DEFINES
#endif
#endif
#include <math.h>
#ifndef M_PI_2
#define M_PI_2 ((float)asin(1))
#endif
/**
* @file mavlink_conversions.h
*
* These conversion functions follow the NASA rotation standards definition file
* available online.
*
* Their intent is to lower the barrier for MAVLink adopters to use gimbal-lock free
* (both rotation matrices, sometimes called DCM, and quaternions are gimbal-lock free)
* rotation representations. Euler angles (roll, pitch, yaw) will be phased out of the
* protocol as widely as possible.
*
* @author James Goppert
* @author Thomas Gubler <thomasgubler@gmail.com>
*/
/**
* Converts a quaternion to a rotation matrix
*
* @param quaternion a [w, x, y, z] ordered quaternion (null-rotation being 1 0 0 0)
* @param dcm a 3x3 rotation matrix
*/
MAVLINK_HELPER void mavlink_quaternion_to_dcm(const float quaternion[4], float dcm[3][3])
{
double a = quaternion[0];
double b = quaternion[1];
double c = quaternion[2];
double d = quaternion[3];
double aSq = a * a;
double bSq = b * b;
double cSq = c * c;
double dSq = d * d;
dcm[0][0] = aSq + bSq - cSq - dSq;
dcm[0][1] = 2 * (b * c - a * d);
dcm[0][2] = 2 * (a * c + b * d);
dcm[1][0] = 2 * (b * c + a * d);
dcm[1][1] = aSq - bSq + cSq - dSq;
dcm[1][2] = 2 * (c * d - a * b);
dcm[2][0] = 2 * (b * d - a * c);
dcm[2][1] = 2 * (a * b + c * d);
dcm[2][2] = aSq - bSq - cSq + dSq;
}
/**
* Converts a rotation matrix to euler angles
*
* @param dcm a 3x3 rotation matrix
* @param roll the roll angle in radians
* @param pitch the pitch angle in radians
* @param yaw the yaw angle in radians
*/
MAVLINK_HELPER void mavlink_dcm_to_euler(const float dcm[3][3], float* roll, float* pitch, float* yaw)
{
float phi, theta, psi;
theta = asin(-dcm[2][0]);
if (fabsf(theta - (float)M_PI_2) < 1.0e-3f) {
phi = 0.0f;
psi = (atan2f(dcm[1][2] - dcm[0][1],
dcm[0][2] + dcm[1][1]) + phi);
} else if (fabsf(theta + (float)M_PI_2) < 1.0e-3f) {
phi = 0.0f;
psi = atan2f(dcm[1][2] - dcm[0][1],
dcm[0][2] + dcm[1][1] - phi);
} else {
phi = atan2f(dcm[2][1], dcm[2][2]);
psi = atan2f(dcm[1][0], dcm[0][0]);
}
*roll = phi;
*pitch = theta;
*yaw = psi;
}
/**
* Converts a quaternion to euler angles
*
* @param quaternion a [w, x, y, z] ordered quaternion (null-rotation being 1 0 0 0)
* @param roll the roll angle in radians
* @param pitch the pitch angle in radians
* @param yaw the yaw angle in radians
*/
MAVLINK_HELPER void mavlink_quaternion_to_euler(const float quaternion[4], float* roll, float* pitch, float* yaw)
{
float dcm[3][3];
mavlink_quaternion_to_dcm(quaternion, dcm);
mavlink_dcm_to_euler((const float(*)[3])dcm, roll, pitch, yaw);
}
/**
* Converts euler angles to a quaternion
*
* @param roll the roll angle in radians
* @param pitch the pitch angle in radians
* @param yaw the yaw angle in radians
* @param quaternion a [w, x, y, z] ordered quaternion (null-rotation being 1 0 0 0)
*/
MAVLINK_HELPER void mavlink_euler_to_quaternion(float roll, float pitch, float yaw, float quaternion[4])
{
float cosPhi_2 = cosf(roll / 2);
float sinPhi_2 = sinf(roll / 2);
float cosTheta_2 = cosf(pitch / 2);
float sinTheta_2 = sinf(pitch / 2);
float cosPsi_2 = cosf(yaw / 2);
float sinPsi_2 = sinf(yaw / 2);
quaternion[0] = (cosPhi_2 * cosTheta_2 * cosPsi_2 +
sinPhi_2 * sinTheta_2 * sinPsi_2);
quaternion[1] = (sinPhi_2 * cosTheta_2 * cosPsi_2 -
cosPhi_2 * sinTheta_2 * sinPsi_2);
quaternion[2] = (cosPhi_2 * sinTheta_2 * cosPsi_2 +
sinPhi_2 * cosTheta_2 * sinPsi_2);
quaternion[3] = (cosPhi_2 * cosTheta_2 * sinPsi_2 -
sinPhi_2 * sinTheta_2 * cosPsi_2);
}
/**
* Converts a rotation matrix to a quaternion
* Reference:
* - Shoemake, Quaternions,
* http://www.cs.ucr.edu/~vbz/resources/quatut.pdf
*
* @param dcm a 3x3 rotation matrix
* @param quaternion a [w, x, y, z] ordered quaternion (null-rotation being 1 0 0 0)
*/
MAVLINK_HELPER void mavlink_dcm_to_quaternion(const float dcm[3][3], float quaternion[4])
{
int dcm_j,dcm_k;
float s;
float tr = dcm[0][0] + dcm[1][1] + dcm[2][2];
if (tr > 0.0f) {
float s = sqrtf(tr + 1.0f);
quaternion[0] = s * 0.5f;
s = 0.5f / s;
quaternion[1] = (dcm[2][1] - dcm[1][2]) * s;
quaternion[2] = (dcm[0][2] - dcm[2][0]) * s;
quaternion[3] = (dcm[1][0] - dcm[0][1]) * s;
} else {
/* Find maximum diagonal element in dcm
* store index in dcm_i */
int dcm_i = 0;
int i;
for (i = 1; i < 3; i++) {
if (dcm[i][i] > dcm[dcm_i][dcm_i]) {
dcm_i = i;
}
}
dcm_j = (dcm_i + 1) % 3;
dcm_k = (dcm_i + 2) % 3;
s = sqrtf((dcm[dcm_i][dcm_i] - dcm[dcm_j][dcm_j] -
dcm[dcm_k][dcm_k]) + 1.0f);
quaternion[dcm_i + 1] = s * 0.5f;
s = 0.5f / s;
quaternion[dcm_j + 1] = (dcm[dcm_i][dcm_j] + dcm[dcm_j][dcm_i]) * s;
quaternion[dcm_k + 1] = (dcm[dcm_k][dcm_i] + dcm[dcm_i][dcm_k]) * s;
quaternion[0] = (dcm[dcm_k][dcm_j] - dcm[dcm_j][dcm_k]) * s;
}
}
/**
* Converts euler angles to a rotation matrix
*
* @param roll the roll angle in radians
* @param pitch the pitch angle in radians
* @param yaw the yaw angle in radians
* @param dcm a 3x3 rotation matrix
*/
MAVLINK_HELPER void mavlink_euler_to_dcm(float roll, float pitch, float yaw, float dcm[3][3])
{
float cosPhi = cosf(roll);
float sinPhi = sinf(roll);
float cosThe = cosf(pitch);
float sinThe = sinf(pitch);
float cosPsi = cosf(yaw);
float sinPsi = sinf(yaw);
dcm[0][0] = cosThe * cosPsi;
dcm[0][1] = -cosPhi * sinPsi + sinPhi * sinThe * cosPsi;
dcm[0][2] = sinPhi * sinPsi + cosPhi * sinThe * cosPsi;
dcm[1][0] = cosThe * sinPsi;
dcm[1][1] = cosPhi * cosPsi + sinPhi * sinThe * sinPsi;
dcm[1][2] = -sinPhi * cosPsi + cosPhi * sinThe * sinPsi;
dcm[2][0] = -sinThe;
dcm[2][1] = sinPhi * cosThe;
dcm[2][2] = cosPhi * cosThe;
}
#endif
10.mavlink_types.h跟源代码相比较屏蔽了下面这段代码
(关于MAVPACKED相关定义在mavlink_avoid_errors.h中)
// Macro to define packed structures//#ifdef __GNUC__// #define MAVPACKED( __Declaration__ ) __Declaration__ __attribute__((packed))//#else// #define MAVPACKED( __Declaration__ ) __pragma( pack(push, 1) ) __Declaration__ __pragma( pack(pop) )//#endif
mavlink_types.h全代码:
#ifndef MAVLINK_TYPES_H_
#define MAVLINK_TYPES_H_
// Visual Studio versions before 2010 don't have stdint.h, so we just error out.
#if (defined _MSC_VER) && (_MSC_VER < 1600)
#error "The C-MAVLink implementation requires Visual Studio 2010 or greater"
#endif
#include <stdint.h>
// Macro to define packed structures
//#ifdef __GNUC__
// #define MAVPACKED( __Declaration__ ) __Declaration__ __attribute__((packed))
//#else
// #define MAVPACKED( __Declaration__ ) __pragma( pack(push, 1) ) __Declaration__ __pragma( pack(pop) )
//#endif
#ifndef MAVLINK_MAX_PAYLOAD_LEN
// it is possible to override this, but be careful!
#define MAVLINK_MAX_PAYLOAD_LEN 255 ///< Maximum payload length
#endif
#define MAVLINK_CORE_HEADER_LEN 5 ///< Length of core header (of the comm. layer): message length (1 byte) + message sequence (1 byte) + message system id (1 byte) + message component id (1 byte) + message type id (1 byte)
#define MAVLINK_NUM_HEADER_BYTES (MAVLINK_CORE_HEADER_LEN + 1) ///< Length of all header bytes, including core and checksum
#define MAVLINK_NUM_CHECKSUM_BYTES 2
#define MAVLINK_NUM_NON_PAYLOAD_BYTES (MAVLINK_NUM_HEADER_BYTES + MAVLINK_NUM_CHECKSUM_BYTES)
#define MAVLINK_MAX_PACKET_LEN (MAVLINK_MAX_PAYLOAD_LEN + MAVLINK_NUM_NON_PAYLOAD_BYTES) ///< Maximum packet length
#define MAVLINK_MSG_ID_EXTENDED_MESSAGE 255
#define MAVLINK_EXTENDED_HEADER_LEN 14
#if (defined _MSC_VER) || ((defined __APPLE__) && (defined __MACH__)) || (defined __linux__)
/* full fledged 32bit++ OS */
#define MAVLINK_MAX_EXTENDED_PACKET_LEN 65507
#else
/* small microcontrollers */
#define MAVLINK_MAX_EXTENDED_PACKET_LEN 2048
#endif
#define MAVLINK_MAX_EXTENDED_PAYLOAD_LEN (MAVLINK_MAX_EXTENDED_PACKET_LEN - MAVLINK_EXTENDED_HEADER_LEN - MAVLINK_NUM_NON_PAYLOAD_BYTES)
/**
* Old-style 4 byte param union
*
* This struct is the data format to be used when sending
* parameters. The parameter should be copied to the native
* type (without type conversion)
* and re-instanted on the receiving side using the
* native type as well.
*/
MAVPACKED(
typedef struct param_union {
union {
float param_float;
int32_t param_int32;
uint32_t param_uint32;
int16_t param_int16;
uint16_t param_uint16;
int8_t param_int8;
uint8_t param_uint8;
uint8_t bytes[4];
};
uint8_t type;
}) mavlink_param_union_t;
/**
* New-style 8 byte param union
* mavlink_param_union_double_t will be 8 bytes long, and treated as needing 8 byte alignment for the purposes of MAVLink 1.0 field ordering.
* The mavlink_param_union_double_t will be treated as a little-endian structure.
*
* If is_double is 1 then the type is a double, and the remaining 63 bits are the double, with the lowest bit of the mantissa zero.
* The intention is that by replacing the is_double bit with 0 the type can be directly used as a double (as the is_double bit corresponds to the
* lowest mantissa bit of a double). If is_double is 0 then mavlink_type gives the type in the union.
* The mavlink_types.h header will also need to have shifts/masks to define the bit boundaries in the above,
* as bitfield ordering isn’t consistent between platforms. The above is intended to be for gcc on x86,
* which should be the same as gcc on little-endian arm. When using shifts/masks the value will be treated as a 64 bit unsigned number,
* and the bits pulled out using the shifts/masks.
*/
MAVPACKED(
typedef struct param_union_extended {
union {
struct {
uint8_t is_double:1;
uint8_t mavlink_type:7;
union {
char c;
uint8_t uint8;
int8_t int8;
uint16_t uint16;
int16_t int16;
uint32_t uint32;
int32_t int32;
float f;
uint8_t align[7];
};
};
uint8_t data[8];
};
}) mavlink_param_union_double_t;
/**
* This structure is required to make the mavlink_send_xxx convenience functions
* work, as it tells the library what the current system and component ID are.
*/
MAVPACKED(
typedef struct __mavlink_system {
uint8_t sysid; ///< Used by the MAVLink message_xx_send() convenience function
uint8_t compid; ///< Used by the MAVLink message_xx_send() convenience function
}) mavlink_system_t;
MAVPACKED(
typedef struct __mavlink_message {
uint16_t checksum; ///< sent at end of packet
uint8_t magic; ///< protocol magic marker
uint8_t len; ///< Length of payload
uint8_t seq; ///< Sequence of packet
uint8_t sysid; ///< ID of message sender system/aircraft
uint8_t compid; ///< ID of the message sender component
uint8_t msgid; ///< ID of message in payload
uint64_t payload64[(MAVLINK_MAX_PAYLOAD_LEN+MAVLINK_NUM_CHECKSUM_BYTES+7)/8];
}) mavlink_message_t;
MAVPACKED(
typedef struct __mavlink_extended_message {
mavlink_message_t base_msg;
int32_t extended_payload_len; ///< Length of extended payload if any
uint8_t extended_payload[MAVLINK_MAX_EXTENDED_PAYLOAD_LEN];
}) mavlink_extended_message_t;
typedef enum {
MAVLINK_TYPE_CHAR = 0,
MAVLINK_TYPE_UINT8_T = 1,
MAVLINK_TYPE_INT8_T = 2,
MAVLINK_TYPE_UINT16_T = 3,
MAVLINK_TYPE_INT16_T = 4,
MAVLINK_TYPE_UINT32_T = 5,
MAVLINK_TYPE_INT32_T = 6,
MAVLINK_TYPE_UINT64_T = 7,
MAVLINK_TYPE_INT64_T = 8,
MAVLINK_TYPE_FLOAT = 9,
MAVLINK_TYPE_DOUBLE = 10
} mavlink_message_type_t;
#define MAVLINK_MAX_FIELDS 64
typedef struct __mavlink_field_info {
const char *name; // name of this field
const char *print_format; // printing format hint, or NULL
mavlink_message_type_t type; // type of this field
unsigned int array_length; // if non-zero, field is an array
unsigned int wire_offset; // offset of each field in the payload
unsigned int structure_offset; // offset in a C structure
} mavlink_field_info_t;
// note that in this structure the order of fields is the order
// in the XML file, not necessary the wire order
typedef struct __mavlink_message_info {
const char *name; // name of the message
unsigned num_fields; // how many fields in this message
mavlink_field_info_t fields[MAVLINK_MAX_FIELDS]; // field information
} mavlink_message_info_t;
#define _MAV_PAYLOAD(msg) ((const char *)(&((msg)->payload64[0])))
#define _MAV_PAYLOAD_NON_CONST(msg) ((char *)(&((msg)->payload64[0])))
// checksum is immediately after the payload bytes
#define mavlink_ck_a(msg) *((msg)->len + (uint8_t *)_MAV_PAYLOAD_NON_CONST(msg))
#define mavlink_ck_b(msg) *(((msg)->len+(uint16_t)1) + (uint8_t *)_MAV_PAYLOAD_NON_CONST(msg))
typedef enum {
MAVLINK_COMM_0,
MAVLINK_COMM_1,
MAVLINK_COMM_2,
MAVLINK_COMM_3
} mavlink_channel_t;
/*
* applications can set MAVLINK_COMM_NUM_BUFFERS to the maximum number
* of buffers they will use. If more are used, then the result will be
* a stack overrun
*/
#ifndef MAVLINK_COMM_NUM_BUFFERS
#if (defined linux) | (defined __linux) | (defined __MACH__) | (defined _WIN32)
# define MAVLINK_COMM_NUM_BUFFERS 16
#else
# define MAVLINK_COMM_NUM_BUFFERS 4
#endif
#endif
typedef enum {
MAVLINK_PARSE_STATE_UNINIT=0,
MAVLINK_PARSE_STATE_IDLE,
MAVLINK_PARSE_STATE_GOT_STX,
MAVLINK_PARSE_STATE_GOT_SEQ,
MAVLINK_PARSE_STATE_GOT_LENGTH,
MAVLINK_PARSE_STATE_GOT_SYSID,
MAVLINK_PARSE_STATE_GOT_COMPID,
MAVLINK_PARSE_STATE_GOT_MSGID,
MAVLINK_PARSE_STATE_GOT_PAYLOAD,
MAVLINK_PARSE_STATE_GOT_CRC1,
MAVLINK_PARSE_STATE_GOT_BAD_CRC1
} mavlink_parse_state_t; ///< The state machine for the comm parser
typedef enum {
MAVLINK_FRAMING_INCOMPLETE=0,
MAVLINK_FRAMING_OK=1,
MAVLINK_FRAMING_BAD_CRC=2
} mavlink_framing_t;
typedef struct __mavlink_status {
uint8_t msg_received; ///< Number of received messages
uint8_t buffer_overrun; ///< Number of buffer overruns
uint8_t parse_error; ///< Number of parse errors
mavlink_parse_state_t parse_state; ///< Parsing state machine
uint8_t packet_idx; ///< Index in current packet
uint8_t current_rx_seq; ///< Sequence number of last packet received
uint8_t current_tx_seq; ///< Sequence number of last packet sent
uint16_t packet_rx_success_count; ///< Received packets
uint16_t packet_rx_drop_count; ///< Number of packet drops
} mavlink_status_t;
#define MAVLINK_BIG_ENDIAN 0
#define MAVLINK_LITTLE_ENDIAN 1
#endif /* MAVLINK_TYPES_H_ */
#define MAVLINK_TYPES_H_
// Visual Studio versions before 2010 don't have stdint.h, so we just error out.
#if (defined _MSC_VER) && (_MSC_VER < 1600)
#error "The C-MAVLink implementation requires Visual Studio 2010 or greater"
#endif
#include <stdint.h>
// Macro to define packed structures
//#ifdef __GNUC__
// #define MAVPACKED( __Declaration__ ) __Declaration__ __attribute__((packed))
//#else
// #define MAVPACKED( __Declaration__ ) __pragma( pack(push, 1) ) __Declaration__ __pragma( pack(pop) )
//#endif
#ifndef MAVLINK_MAX_PAYLOAD_LEN
// it is possible to override this, but be careful!
#define MAVLINK_MAX_PAYLOAD_LEN 255 ///< Maximum payload length
#endif
#define MAVLINK_CORE_HEADER_LEN 5 ///< Length of core header (of the comm. layer): message length (1 byte) + message sequence (1 byte) + message system id (1 byte) + message component id (1 byte) + message type id (1 byte)
#define MAVLINK_NUM_HEADER_BYTES (MAVLINK_CORE_HEADER_LEN + 1) ///< Length of all header bytes, including core and checksum
#define MAVLINK_NUM_CHECKSUM_BYTES 2
#define MAVLINK_NUM_NON_PAYLOAD_BYTES (MAVLINK_NUM_HEADER_BYTES + MAVLINK_NUM_CHECKSUM_BYTES)
#define MAVLINK_MAX_PACKET_LEN (MAVLINK_MAX_PAYLOAD_LEN + MAVLINK_NUM_NON_PAYLOAD_BYTES) ///< Maximum packet length
#define MAVLINK_MSG_ID_EXTENDED_MESSAGE 255
#define MAVLINK_EXTENDED_HEADER_LEN 14
#if (defined _MSC_VER) || ((defined __APPLE__) && (defined __MACH__)) || (defined __linux__)
/* full fledged 32bit++ OS */
#define MAVLINK_MAX_EXTENDED_PACKET_LEN 65507
#else
/* small microcontrollers */
#define MAVLINK_MAX_EXTENDED_PACKET_LEN 2048
#endif
#define MAVLINK_MAX_EXTENDED_PAYLOAD_LEN (MAVLINK_MAX_EXTENDED_PACKET_LEN - MAVLINK_EXTENDED_HEADER_LEN - MAVLINK_NUM_NON_PAYLOAD_BYTES)
/**
* Old-style 4 byte param union
*
* This struct is the data format to be used when sending
* parameters. The parameter should be copied to the native
* type (without type conversion)
* and re-instanted on the receiving side using the
* native type as well.
*/
MAVPACKED(
typedef struct param_union {
union {
float param_float;
int32_t param_int32;
uint32_t param_uint32;
int16_t param_int16;
uint16_t param_uint16;
int8_t param_int8;
uint8_t param_uint8;
uint8_t bytes[4];
};
uint8_t type;
}) mavlink_param_union_t;
/**
* New-style 8 byte param union
* mavlink_param_union_double_t will be 8 bytes long, and treated as needing 8 byte alignment for the purposes of MAVLink 1.0 field ordering.
* The mavlink_param_union_double_t will be treated as a little-endian structure.
*
* If is_double is 1 then the type is a double, and the remaining 63 bits are the double, with the lowest bit of the mantissa zero.
* The intention is that by replacing the is_double bit with 0 the type can be directly used as a double (as the is_double bit corresponds to the
* lowest mantissa bit of a double). If is_double is 0 then mavlink_type gives the type in the union.
* The mavlink_types.h header will also need to have shifts/masks to define the bit boundaries in the above,
* as bitfield ordering isn’t consistent between platforms. The above is intended to be for gcc on x86,
* which should be the same as gcc on little-endian arm. When using shifts/masks the value will be treated as a 64 bit unsigned number,
* and the bits pulled out using the shifts/masks.
*/
MAVPACKED(
typedef struct param_union_extended {
union {
struct {
uint8_t is_double:1;
uint8_t mavlink_type:7;
union {
char c;
uint8_t uint8;
int8_t int8;
uint16_t uint16;
int16_t int16;
uint32_t uint32;
int32_t int32;
float f;
uint8_t align[7];
};
};
uint8_t data[8];
};
}) mavlink_param_union_double_t;
/**
* This structure is required to make the mavlink_send_xxx convenience functions
* work, as it tells the library what the current system and component ID are.
*/
MAVPACKED(
typedef struct __mavlink_system {
uint8_t sysid; ///< Used by the MAVLink message_xx_send() convenience function
uint8_t compid; ///< Used by the MAVLink message_xx_send() convenience function
}) mavlink_system_t;
MAVPACKED(
typedef struct __mavlink_message {
uint16_t checksum; ///< sent at end of packet
uint8_t magic; ///< protocol magic marker
uint8_t len; ///< Length of payload
uint8_t seq; ///< Sequence of packet
uint8_t sysid; ///< ID of message sender system/aircraft
uint8_t compid; ///< ID of the message sender component
uint8_t msgid; ///< ID of message in payload
uint64_t payload64[(MAVLINK_MAX_PAYLOAD_LEN+MAVLINK_NUM_CHECKSUM_BYTES+7)/8];
}) mavlink_message_t;
MAVPACKED(
typedef struct __mavlink_extended_message {
mavlink_message_t base_msg;
int32_t extended_payload_len; ///< Length of extended payload if any
uint8_t extended_payload[MAVLINK_MAX_EXTENDED_PAYLOAD_LEN];
}) mavlink_extended_message_t;
typedef enum {
MAVLINK_TYPE_CHAR = 0,
MAVLINK_TYPE_UINT8_T = 1,
MAVLINK_TYPE_INT8_T = 2,
MAVLINK_TYPE_UINT16_T = 3,
MAVLINK_TYPE_INT16_T = 4,
MAVLINK_TYPE_UINT32_T = 5,
MAVLINK_TYPE_INT32_T = 6,
MAVLINK_TYPE_UINT64_T = 7,
MAVLINK_TYPE_INT64_T = 8,
MAVLINK_TYPE_FLOAT = 9,
MAVLINK_TYPE_DOUBLE = 10
} mavlink_message_type_t;
#define MAVLINK_MAX_FIELDS 64
typedef struct __mavlink_field_info {
const char *name; // name of this field
const char *print_format; // printing format hint, or NULL
mavlink_message_type_t type; // type of this field
unsigned int array_length; // if non-zero, field is an array
unsigned int wire_offset; // offset of each field in the payload
unsigned int structure_offset; // offset in a C structure
} mavlink_field_info_t;
// note that in this structure the order of fields is the order
// in the XML file, not necessary the wire order
typedef struct __mavlink_message_info {
const char *name; // name of the message
unsigned num_fields; // how many fields in this message
mavlink_field_info_t fields[MAVLINK_MAX_FIELDS]; // field information
} mavlink_message_info_t;
#define _MAV_PAYLOAD(msg) ((const char *)(&((msg)->payload64[0])))
#define _MAV_PAYLOAD_NON_CONST(msg) ((char *)(&((msg)->payload64[0])))
// checksum is immediately after the payload bytes
#define mavlink_ck_a(msg) *((msg)->len + (uint8_t *)_MAV_PAYLOAD_NON_CONST(msg))
#define mavlink_ck_b(msg) *(((msg)->len+(uint16_t)1) + (uint8_t *)_MAV_PAYLOAD_NON_CONST(msg))
typedef enum {
MAVLINK_COMM_0,
MAVLINK_COMM_1,
MAVLINK_COMM_2,
MAVLINK_COMM_3
} mavlink_channel_t;
/*
* applications can set MAVLINK_COMM_NUM_BUFFERS to the maximum number
* of buffers they will use. If more are used, then the result will be
* a stack overrun
*/
#ifndef MAVLINK_COMM_NUM_BUFFERS
#if (defined linux) | (defined __linux) | (defined __MACH__) | (defined _WIN32)
# define MAVLINK_COMM_NUM_BUFFERS 16
#else
# define MAVLINK_COMM_NUM_BUFFERS 4
#endif
#endif
typedef enum {
MAVLINK_PARSE_STATE_UNINIT=0,
MAVLINK_PARSE_STATE_IDLE,
MAVLINK_PARSE_STATE_GOT_STX,
MAVLINK_PARSE_STATE_GOT_SEQ,
MAVLINK_PARSE_STATE_GOT_LENGTH,
MAVLINK_PARSE_STATE_GOT_SYSID,
MAVLINK_PARSE_STATE_GOT_COMPID,
MAVLINK_PARSE_STATE_GOT_MSGID,
MAVLINK_PARSE_STATE_GOT_PAYLOAD,
MAVLINK_PARSE_STATE_GOT_CRC1,
MAVLINK_PARSE_STATE_GOT_BAD_CRC1
} mavlink_parse_state_t; ///< The state machine for the comm parser
typedef enum {
MAVLINK_FRAMING_INCOMPLETE=0,
MAVLINK_FRAMING_OK=1,
MAVLINK_FRAMING_BAD_CRC=2
} mavlink_framing_t;
typedef struct __mavlink_status {
uint8_t msg_received; ///< Number of received messages
uint8_t buffer_overrun; ///< Number of buffer overruns
uint8_t parse_error; ///< Number of parse errors
mavlink_parse_state_t parse_state; ///< Parsing state machine
uint8_t packet_idx; ///< Index in current packet
uint8_t current_rx_seq; ///< Sequence number of last packet received
uint8_t current_tx_seq; ///< Sequence number of last packet sent
uint16_t packet_rx_success_count; ///< Received packets
uint16_t packet_rx_drop_count; ///< Number of packet drops
} mavlink_status_t;
#define MAVLINK_BIG_ENDIAN 0
#define MAVLINK_LITTLE_ENDIAN 1
#endif /* MAVLINK_TYPES_H_ */
11.protocol.h未做任何修改,附上全代码
protocol.h全代码:
#define _MAVLINK_PROTOCOL_H_
#include "string.h"
#include "mavlink_types.h"
/*
If you want MAVLink on a system that is native big-endian,
you need to define NATIVE_BIG_ENDIAN
*/
#ifdef NATIVE_BIG_ENDIAN
# define MAVLINK_NEED_BYTE_SWAP (MAVLINK_ENDIAN == MAVLINK_LITTLE_ENDIAN)
#else
# define MAVLINK_NEED_BYTE_SWAP (MAVLINK_ENDIAN != MAVLINK_LITTLE_ENDIAN)
#endif
#ifndef MAVLINK_STACK_BUFFER
#define MAVLINK_STACK_BUFFER 0
#endif
#ifndef MAVLINK_AVOID_GCC_STACK_BUG
# define MAVLINK_AVOID_GCC_STACK_BUG defined(__GNUC__)
#endif
#ifndef MAVLINK_ASSERT
#define MAVLINK_ASSERT(x)
#endif
#ifndef MAVLINK_START_UART_SEND
#define MAVLINK_START_UART_SEND(chan, length)
#endif
#ifndef MAVLINK_END_UART_SEND
#define MAVLINK_END_UART_SEND(chan, length)
#endif
/* option to provide alternative implementation of mavlink_helpers.h */
#ifdef MAVLINK_SEPARATE_HELPERS
#define MAVLINK_HELPER
/* decls in sync with those in mavlink_helpers.h */
#ifndef MAVLINK_GET_CHANNEL_STATUS
MAVLINK_HELPER mavlink_status_t* mavlink_get_channel_status(uint8_t chan);
#endif
MAVLINK_HELPER void mavlink_reset_channel_status(uint8_t chan);
#if MAVLINK_CRC_EXTRA
MAVLINK_HELPER uint16_t mavlink_finalize_message_chan(mavlink_message_t* msg, uint8_t system_id, uint8_t component_id,
uint8_t chan, uint8_t min_length, uint8_t length, uint8_t crc_extra);
MAVLINK_HELPER uint16_t mavlink_finalize_message(mavlink_message_t* msg, uint8_t system_id, uint8_t component_id,
uint8_t min_length, uint8_t length, uint8_t crc_extra);
#ifdef MAVLINK_USE_CONVENIENCE_FUNCTIONS
MAVLINK_HELPER void _mav_finalize_message_chan_send(mavlink_channel_t chan, uint8_t msgid, const char *packet,
uint8_t min_length, uint8_t length, uint8_t crc_extra);
#endif
#else
MAVLINK_HELPER uint16_t mavlink_finalize_message_chan(mavlink_message_t* msg, uint8_t system_id, uint8_t component_id,
uint8_t chan, uint8_t length);
MAVLINK_HELPER uint16_t mavlink_finalize_message(mavlink_message_t* msg, uint8_t system_id, uint8_t component_id,
uint8_t length);
#ifdef MAVLINK_USE_CONVENIENCE_FUNCTIONS
MAVLINK_HELPER void _mav_finalize_message_chan_send(mavlink_channel_t chan, uint8_t msgid, const char *packet, uint8_t length);
#endif
#endif // MAVLINK_CRC_EXTRA
MAVLINK_HELPER uint16_t mavlink_msg_to_send_buffer(uint8_t *buffer, const mavlink_message_t *msg);
MAVLINK_HELPER void mavlink_start_checksum(mavlink_message_t* msg);
MAVLINK_HELPER void mavlink_update_checksum(mavlink_message_t* msg, uint8_t c);
MAVLINK_HELPER uint8_t mavlink_frame_char_buffer(mavlink_message_t* rxmsg,
mavlink_status_t* status,
uint8_t c,
mavlink_message_t* r_message,
mavlink_status_t* r_mavlink_status);
MAVLINK_HELPER uint8_t mavlink_frame_char(uint8_t chan, uint8_t c, mavlink_message_t* r_message, mavlink_status_t* r_mavlink_status);
MAVLINK_HELPER uint8_t mavlink_parse_char(uint8_t chan, uint8_t c, mavlink_message_t* r_message, mavlink_status_t* r_mavlink_status);
MAVLINK_HELPER uint8_t put_bitfield_n_by_index(int32_t b, uint8_t bits, uint8_t packet_index, uint8_t bit_index,
uint8_t* r_bit_index, uint8_t* buffer);
#ifdef MAVLINK_USE_CONVENIENCE_FUNCTIONS
MAVLINK_HELPER void _mavlink_send_uart(mavlink_channel_t chan, const char *buf, uint16_t len);
MAVLINK_HELPER void _mavlink_resend_uart(mavlink_channel_t chan, const mavlink_message_t *msg);
#endif
#else
#define MAVLINK_HELPER static inline
#include "mavlink_helpers.h"
#endif // MAVLINK_SEPARATE_HELPERS
/**
* @brief Get the required buffer size for this message
*/
static inline uint16_t mavlink_msg_get_send_buffer_length(const mavlink_message_t* msg)
{
return msg->len + MAVLINK_NUM_NON_PAYLOAD_BYTES;
}
#if MAVLINK_NEED_BYTE_SWAP
static inline void byte_swap_2(char *dst, const char *src)
{
dst[0] = src[1];
dst[1] = src[0];
}
static inline void byte_swap_4(char *dst, const char *src)
{
dst[0] = src[3];
dst[1] = src[2];
dst[2] = src[1];
dst[3] = src[0];
}
static inline void byte_swap_8(char *dst, const char *src)
{
dst[0] = src[7];
dst[1] = src[6];
dst[2] = src[5];
dst[3] = src[4];
dst[4] = src[3];
dst[5] = src[2];
dst[6] = src[1];
dst[7] = src[0];
}
#elif !MAVLINK_ALIGNED_FIELDS
static inline void byte_copy_2(char *dst, const char *src)
{
dst[0] = src[0];
dst[1] = src[1];
}
static inline void byte_copy_4(char *dst, const char *src)
{
dst[0] = src[0];
dst[1] = src[1];
dst[2] = src[2];
dst[3] = src[3];
}
static inline void byte_copy_8(char *dst, const char *src)
{
memcpy(dst, src, 8);
}
#endif
#define _mav_put_uint8_t(buf, wire_offset, b) buf[wire_offset] = (uint8_t)b
#define _mav_put_int8_t(buf, wire_offset, b) buf[wire_offset] = (int8_t)b
#define _mav_put_char(buf, wire_offset, b) buf[wire_offset] = b
#if MAVLINK_NEED_BYTE_SWAP
#define _mav_put_uint16_t(buf, wire_offset, b) byte_swap_2(&buf[wire_offset], (const char *)&b)
#define _mav_put_int16_t(buf, wire_offset, b) byte_swap_2(&buf[wire_offset], (const char *)&b)
#define _mav_put_uint32_t(buf, wire_offset, b) byte_swap_4(&buf[wire_offset], (const char *)&b)
#define _mav_put_int32_t(buf, wire_offset, b) byte_swap_4(&buf[wire_offset], (const char *)&b)
#define _mav_put_uint64_t(buf, wire_offset, b) byte_swap_8(&buf[wire_offset], (const char *)&b)
#define _mav_put_int64_t(buf, wire_offset, b) byte_swap_8(&buf[wire_offset], (const char *)&b)
#define _mav_put_float(buf, wire_offset, b) byte_swap_4(&buf[wire_offset], (const char *)&b)
#define _mav_put_double(buf, wire_offset, b) byte_swap_8(&buf[wire_offset], (const char *)&b)
#elif !MAVLINK_ALIGNED_FIELDS
#define _mav_put_uint16_t(buf, wire_offset, b) byte_copy_2(&buf[wire_offset], (const char *)&b)
#define _mav_put_int16_t(buf, wire_offset, b) byte_copy_2(&buf[wire_offset], (const char *)&b)
#define _mav_put_uint32_t(buf, wire_offset, b) byte_copy_4(&buf[wire_offset], (const char *)&b)
#define _mav_put_int32_t(buf, wire_offset, b) byte_copy_4(&buf[wire_offset], (const char *)&b)
#define _mav_put_uint64_t(buf, wire_offset, b) byte_copy_8(&buf[wire_offset], (const char *)&b)
#define _mav_put_int64_t(buf, wire_offset, b) byte_copy_8(&buf[wire_offset], (const char *)&b)
#define _mav_put_float(buf, wire_offset, b) byte_copy_4(&buf[wire_offset], (const char *)&b)
#define _mav_put_double(buf, wire_offset, b) byte_copy_8(&buf[wire_offset], (const char *)&b)
#else
#define _mav_put_uint16_t(buf, wire_offset, b) *(uint16_t *)&buf[wire_offset] = b
#define _mav_put_int16_t(buf, wire_offset, b) *(int16_t *)&buf[wire_offset] = b
#define _mav_put_uint32_t(buf, wire_offset, b) *(uint32_t *)&buf[wire_offset] = b
#define _mav_put_int32_t(buf, wire_offset, b) *(int32_t *)&buf[wire_offset] = b
#define _mav_put_uint64_t(buf, wire_offset, b) *(uint64_t *)&buf[wire_offset] = b
#define _mav_put_int64_t(buf, wire_offset, b) *(int64_t *)&buf[wire_offset] = b
#define _mav_put_float(buf, wire_offset, b) *(float *)&buf[wire_offset] = b
#define _mav_put_double(buf, wire_offset, b) *(double *)&buf[wire_offset] = b
#endif
/*
like memcpy(), but if src is NULL, do a memset to zero
*/
static inline void mav_array_memcpy(void *dest, const void *src, size_t n)
{
if (src == NULL) {
memset(dest, 0, n);
} else {
memcpy(dest, src, n);
}
}
/*
* Place a char array into a buffer
*/
static inline void _mav_put_char_array(char *buf, uint8_t wire_offset, const char *b, uint8_t array_length)
{
mav_array_memcpy(&buf[wire_offset], b, array_length);
}
/*
* Place a uint8_t array into a buffer
*/
static inline void _mav_put_uint8_t_array(char *buf, uint8_t wire_offset, const uint8_t *b, uint8_t array_length)
{
mav_array_memcpy(&buf[wire_offset], b, array_length);
}
/*
* Place a int8_t array into a buffer
*/
static inline void _mav_put_int8_t_array(char *buf, uint8_t wire_offset, const int8_t *b, uint8_t array_length)
{
mav_array_memcpy(&buf[wire_offset], b, array_length);
}
#if MAVLINK_NEED_BYTE_SWAP
#define _MAV_PUT_ARRAY(TYPE, V) \
static inline void _mav_put_ ## TYPE ##_array(char *buf, uint8_t wire_offset, const TYPE *b, uint8_t array_length) \
{ \
if (b == NULL) { \
memset(&buf[wire_offset], 0, array_length*sizeof(TYPE)); \
} else { \
uint16_t i; \
for (i=0; i<array_length; i++) { \
_mav_put_## TYPE (buf, wire_offset+(i*sizeof(TYPE)), b[i]); \
} \
} \
}
#else
#define _MAV_PUT_ARRAY(TYPE, V) \
static inline void _mav_put_ ## TYPE ##_array(char *buf, uint8_t wire_offset, const TYPE *b, uint8_t array_length) \
{ \
mav_array_memcpy(&buf[wire_offset], b, array_length*sizeof(TYPE)); \
}
#endif
_MAV_PUT_ARRAY(uint16_t, u16)
_MAV_PUT_ARRAY(uint32_t, u32)
_MAV_PUT_ARRAY(uint64_t, u64)
_MAV_PUT_ARRAY(int16_t, i16)
_MAV_PUT_ARRAY(int32_t, i32)
_MAV_PUT_ARRAY(int64_t, i64)
_MAV_PUT_ARRAY(float, f)
_MAV_PUT_ARRAY(double, d)
#define _MAV_RETURN_char(msg, wire_offset) (const char)_MAV_PAYLOAD(msg)[wire_offset]
#define _MAV_RETURN_int8_t(msg, wire_offset) (int8_t)_MAV_PAYLOAD(msg)[wire_offset]
#define _MAV_RETURN_uint8_t(msg, wire_offset) (uint8_t)_MAV_PAYLOAD(msg)[wire_offset]
#if MAVLINK_NEED_BYTE_SWAP
#define _MAV_MSG_RETURN_TYPE(TYPE, SIZE) \
static inline TYPE _MAV_RETURN_## TYPE(const mavlink_message_t *msg, uint8_t ofs) \
{ TYPE r; byte_swap_## SIZE((char*)&r, &_MAV_PAYLOAD(msg)[ofs]); return r; }
_MAV_MSG_RETURN_TYPE(uint16_t, 2)
_MAV_MSG_RETURN_TYPE(int16_t, 2)
_MAV_MSG_RETURN_TYPE(uint32_t, 4)
_MAV_MSG_RETURN_TYPE(int32_t, 4)
_MAV_MSG_RETURN_TYPE(uint64_t, 8)
_MAV_MSG_RETURN_TYPE(int64_t, 8)
_MAV_MSG_RETURN_TYPE(float, 4)
_MAV_MSG_RETURN_TYPE(double, 8)
#elif !MAVLINK_ALIGNED_FIELDS
#define _MAV_MSG_RETURN_TYPE(TYPE, SIZE) \
static inline TYPE _MAV_RETURN_## TYPE(const mavlink_message_t *msg, uint8_t ofs) \
{ TYPE r; byte_copy_## SIZE((char*)&r, &_MAV_PAYLOAD(msg)[ofs]); return r; }
_MAV_MSG_RETURN_TYPE(uint16_t, 2)
_MAV_MSG_RETURN_TYPE(int16_t, 2)
_MAV_MSG_RETURN_TYPE(uint32_t, 4)
_MAV_MSG_RETURN_TYPE(int32_t, 4)
_MAV_MSG_RETURN_TYPE(uint64_t, 8)
_MAV_MSG_RETURN_TYPE(int64_t, 8)
_MAV_MSG_RETURN_TYPE(float, 4)
_MAV_MSG_RETURN_TYPE(double, 8)
#else // nicely aligned, no swap
#define _MAV_MSG_RETURN_TYPE(TYPE) \
static inline TYPE _MAV_RETURN_## TYPE(const mavlink_message_t *msg, uint8_t ofs) \
{ return *(const TYPE *)(&_MAV_PAYLOAD(msg)[ofs]);}
_MAV_MSG_RETURN_TYPE(uint16_t)
_MAV_MSG_RETURN_TYPE(int16_t)
_MAV_MSG_RETURN_TYPE(uint32_t)
_MAV_MSG_RETURN_TYPE(int32_t)
_MAV_MSG_RETURN_TYPE(uint64_t)
_MAV_MSG_RETURN_TYPE(int64_t)
_MAV_MSG_RETURN_TYPE(float)
_MAV_MSG_RETURN_TYPE(double)
#endif // MAVLINK_NEED_BYTE_SWAP
static inline uint16_t _MAV_RETURN_char_array(const mavlink_message_t *msg, char *value,
uint8_t array_length, uint8_t wire_offset)
{
memcpy(value, &_MAV_PAYLOAD(msg)[wire_offset], array_length);
return array_length;
}
static inline uint16_t _MAV_RETURN_uint8_t_array(const mavlink_message_t *msg, uint8_t *value,
uint8_t array_length, uint8_t wire_offset)
{
memcpy(value, &_MAV_PAYLOAD(msg)[wire_offset], array_length);
return array_length;
}
static inline uint16_t _MAV_RETURN_int8_t_array(const mavlink_message_t *msg, int8_t *value,
uint8_t array_length, uint8_t wire_offset)
{
memcpy(value, &_MAV_PAYLOAD(msg)[wire_offset], array_length);
return array_length;
}
#if MAVLINK_NEED_BYTE_SWAP
#define _MAV_RETURN_ARRAY(TYPE, V) \
static inline uint16_t _MAV_RETURN_## TYPE ##_array(const mavlink_message_t *msg, TYPE *value, \
uint8_t array_length, uint8_t wire_offset) \
{ \
uint16_t i; \
for (i=0; i<array_length; i++) { \
value[i] = _MAV_RETURN_## TYPE (msg, wire_offset+(i*sizeof(value[0]))); \
} \
return array_length*sizeof(value[0]); \
}
#else
#define _MAV_RETURN_ARRAY(TYPE, V) \
static inline uint16_t _MAV_RETURN_## TYPE ##_array(const mavlink_message_t *msg, TYPE *value, \
uint8_t array_length, uint8_t wire_offset) \
{ \
memcpy(value, &_MAV_PAYLOAD(msg)[wire_offset], array_length*sizeof(TYPE)); \
return array_length*sizeof(TYPE); \
}
#endif
_MAV_RETURN_ARRAY(uint16_t, u16)
_MAV_RETURN_ARRAY(uint32_t, u32)
_MAV_RETURN_ARRAY(uint64_t, u64)
_MAV_RETURN_ARRAY(int16_t, i16)
_MAV_RETURN_ARRAY(int32_t, i32)
_MAV_RETURN_ARRAY(int64_t, i64)
_MAV_RETURN_ARRAY(float, f)
_MAV_RETURN_ARRAY(double, d)
#endif // _MAVLINK_PROTOCOL_H_//作者:恒久力行 qq:624668529
12.其他代码均未修改,详细移植步骤参考网站http://www.cnblogs.com/lovechen/p/5809709.html
那么现在代码基本就能用了,后续在根据自己的项目或者课题需要加上一些代码即可!
二:实验测试代码是否成功移植
将代码下载到stm32f407的开发板中去。
打开串口调试助手,设置波特率115200,16进制显示接收到的数据。不细讲,看图
打开串口调试助手,设置波特率115200,16进制显示接收到的数据。不细讲,看图
1.测试开发板发送功能
然后重启或者复位开发板,会有数据返回(注意:选中16进制显示)。如图收到如图数据表示发送移植成功。复位一次返回一次同样的数据//作者:恒久力行 qq:624668529
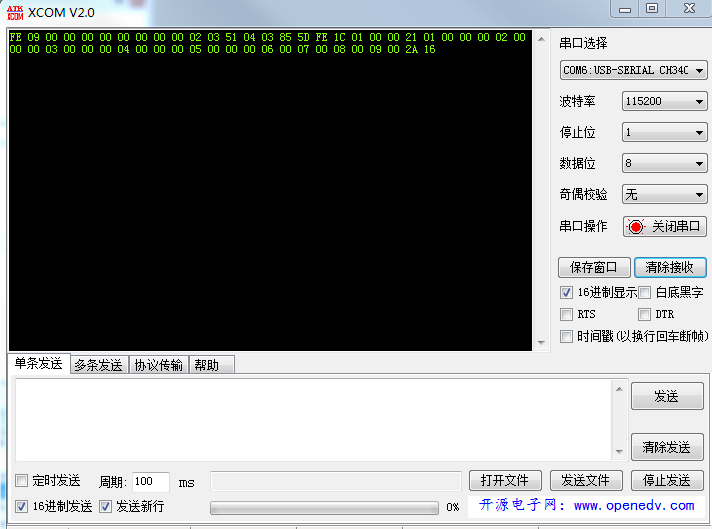
2.测试开发板接收功能
将接收到的数据原封不动的拷贝下来,(复制下来的是16进制的哦,别弄成字符乱码了,注意从FE到结尾的空格都不能少),然后选中16进制发送 同时取消16进制显示。然后将数据粘贴在发送窗(发送窗一定要清空,不能有空格或者回车让光标删除到最前端),先清空接收,点击发送,会有如下字符返回,如图表示接受移植成功。点击一次发送返回一次同样的字符//作者:恒久力行 qq:624668529
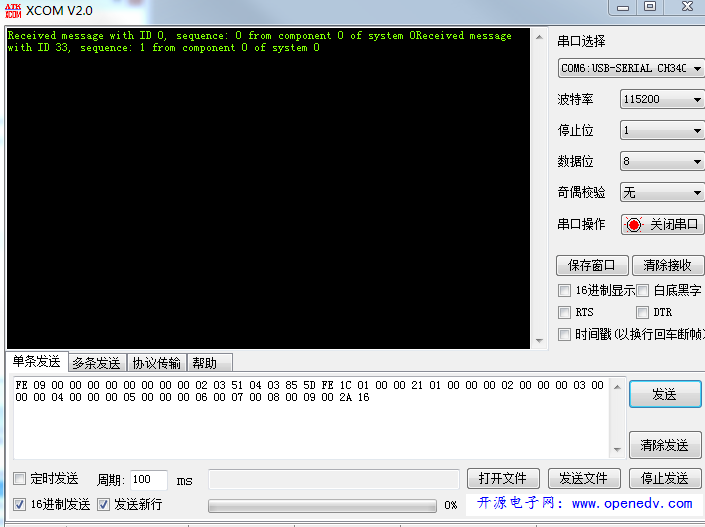
三:分析数据
1.下面是串口助手接收到的开发板发过来的数据
FE 09 00 00 00 00 00 00 00 00 02 03 51 04 03 85 5D FE 1C 01 00 00 21 01 00 00 00 02 00 00 00 03 00 00 00 04 00 00 00 05 00 00 00 06 00 07 00 08 00 09 00 2A 16
2.下图是消息包的发送格式说明
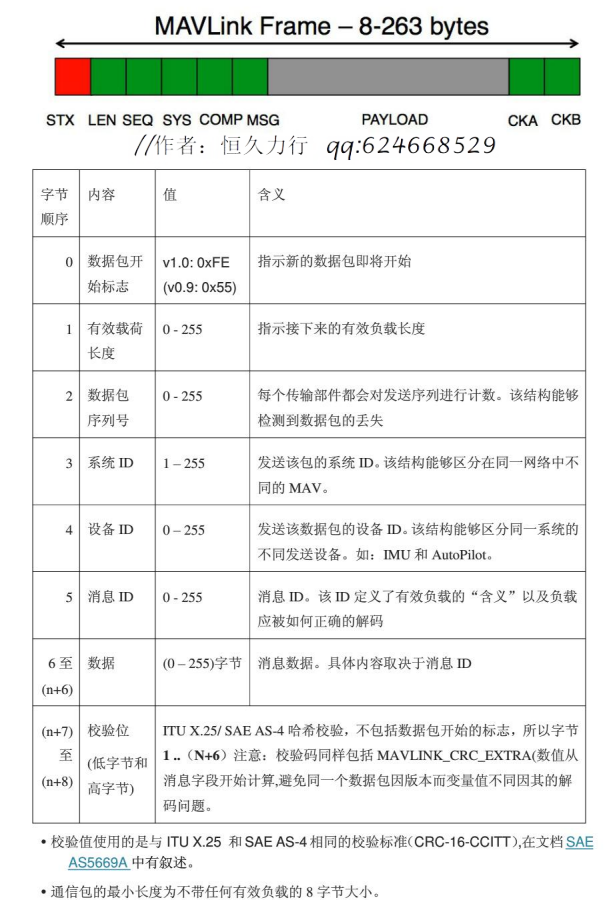
3.将从开发板收到的16进制的数据以FE为分界将两条消息按格式展开如图

4分析
开发板发出的数据,首先都是以FE开头,先看第一帧数据的第二个字节,LEN代表有效载荷PAYLOAD的长度,经自己亲自数数PAYLOAD 确实是9个字节(注意16进制要转换成10进制),同理,再来看第二帧数据的第二个字节1C转换成10进制是28.数一数PAYLOAD的长度确实为28.表示移植数据发送成功。
开发板接收的数据是我们原封不动发回去的数据,其收到后,会对数据进行解析。其对两帧数据解析的结果是(即第二次发回来的字符):
Received message with ID 0, sequence: 0 from component 0 of system 0
Received message with ID 33, sequence: 1 from component 0 of system 0
对比message with ID 即是 MSG (10进制)
sequence 既是SEQ
component 既是COMP
system 既是SYS
对比之后发现数据一一对应。即开发板收到数据后成功的解析了数据。表示移植开发板接收部分成功
移植成功。作者:恒久力行 qq:624668529
然后重启或者复位开发板,会有数据返回(注意:选中16进制显示)。如图收到如图数据表示发送移植成功。复位一次返回一次同样的数据//作者:恒久力行 qq:624668529
2.测试开发板接收功能
将接收到的数据原封不动的拷贝下来,(复制下来的是16进制的哦,别弄成字符乱码了,注意从FE到结尾的空格都不能少),然后选中16进制发送 同时取消16进制显示。然后将数据粘贴在发送窗(发送窗一定要清空,不能有空格或者回车让光标删除到最前端),先清空接收,点击发送,会有如下字符返回,如图表示接受移植成功。点击一次发送返回一次同样的字符//作者:恒久力行 qq:624668529
三:分析数据
1.下面是串口助手接收到的开发板发过来的数据
FE 09 00 00 00 00 00 00 00 00 02 03 51 04 03 85 5D FE 1C 01 00 00 21 01 00 00 00 02 00 00 00 03 00 00 00 04 00 00 00 05 00 00 00 06 00 07 00 08 00 09 00 2A 16
2.下图是消息包的发送格式说明
3.将从开发板收到的16进制的数据以FE为分界将两条消息按格式展开如图
4分析
开发板发出的数据,首先都是以FE开头,先看第一帧数据的第二个字节,LEN代表有效载荷PAYLOAD的长度,经自己亲自数数PAYLOAD 确实是9个字节(注意16进制要转换成10进制),同理,再来看第二帧数据的第二个字节1C转换成10进制是28.数一数PAYLOAD的长度确实为28.表示移植数据发送成功。
开发板接收的数据是我们原封不动发回去的数据,其收到后,会对数据进行解析。其对两帧数据解析的结果是(即第二次发回来的字符):
Received message with ID 0, sequence: 0 from component 0 of system 0
Received message with ID 33, sequence: 1 from component 0 of system 0
对比message with ID 即是 MSG (10进制)
sequence 既是SEQ
component 既是COMP
system 既是SYS
对比之后发现数据一一对应。即开发板收到数据后成功的解析了数据。表示移植开发板接收部分成功
移植成功。作者:恒久力行 qq:624668529
阅读全文
0 0
- STM32控制APM飞控(三)MAVLINK整合并适配stm32串口的收发
- STM32控制APM飞控(五)MAVLINK的C源码的解释及MAVLINK心跳包
- STM32控制APM飞控(二)MAVLINK源码集成到stm32工程中
- STM32控制APM飞控(四)MAVLINK协议深入理解之数据结构
- STM32控制APM飞控(一)研究目的及思路
- stm32串口1收发
- stm32串口收发
- stm32双串口收发
- STM32 CUBE 串口收发
- stm32 485串口数据的收发
- Mavlink协议理解Pixhawk APM(三)
- Stm32串口控制
- stm32串口中断收发数据环形缓冲区的设计
- stm32串口中断收发数据环形缓冲区的设计
- 关于stm32串口2收发问题。
- stm32 串口 DMA变长收发好开心~~
- STM32 串口采用DMA方式收发
- 通过sim900短信收发控制stm32设备
- 如何将Visio绘制的图保存为300dpi的tif图片
- 关于 pip安装的可能错误的排除
- Perl 安装
- SpringMVC基础-1-介绍
- Python selenium自动化测试 登录CSDN实例
- STM32控制APM飞控(三)MAVLINK整合并适配stm32串口的收发
- 欢迎使用CSDN-markdown编辑器
- spring的异常之mybatis与之版本不兼容
- android no debuggable processes
- thinkcmf+PHPExcel实现导入导出功能
- 让小家变得温馨的小诀窍
- 计算机软件概论以及HTML的简单编写
- CSDN Markdown使用
- 2017.11.1第一课


