包围盒算法
来源:互联网 发布:种植牙 知乎 编辑:程序博客网 时间:2024/05/02 00:20
包围体是一个简单的几何空间,里面包含着复杂形状的物体。为物体添加包围体的目的是快速的进行碰撞检测或者进行精确的碰撞检测之前进行过滤(即当包围体碰撞,才进行精确碰撞检测和处理)。包围体类型包括球体、轴对齐包围盒(AABB)、有向包围盒(OBB)、8-DOP以及凸壳。如图1所示。

图1 依次是球体、AABB、OBB
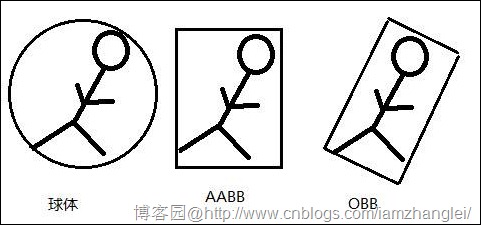
图2 依次是球体、AABB、OBB
包围球碰撞检测方法是用球体包围整个几何体, 无论是几何体还是相交测试都很简单; 但是它的紧密性太差。因为除了在3 个坐标轴上分布得比较均匀的几何体外, 几乎都会留下较大的空隙, 需要花费大量的预处理时间, 以构造一个好的层次结构逼近对象。当物体变形之后,包围球树需要重新计算。因此,它是使用得比较少的一种包围盒。当对象发生旋转运动时, 包围球不需作任何更新, 这是包围球的较优秀特性; 当几何对象进行频繁的旋转运动时, 采用包围球可能得到较好结果。
AABB盒,一个3D的AABB就是一个简单的六面体,每一边都平行于一个坐标平面,矩形边界框不一定都是立方体,它的长、宽、高可以彼此不同。
AABB的重要性质:
Ymin <= Y <= Ymax
Zmin <= Z <= Zmax
特别重要的两个顶点为:Pmin = [Xmin Ymin Zmin],Pmax = [ Xmax Ymax Zmax].
先介绍AABB的表达方法,AABB内的点满足以下条件:
xmin≤x≤xmax
ymin≤y≤ymax
zmin≤z≤zmax
因此只需要知道两个特别重要的顶点(xmin,ymin,zmin)、(xmax,ymax,zmax),记作:
float[] min = new float []{0.0f,0.0f,0.0f}
float[] max = new float []{0.0f,0.0f,0.0f}
中心点是两个顶点的中点,代表了包装盒的质点。
float[] center = new float []{0.0f,0.0f,0.0f}
中心点的计算方法如下:
float [] center(){
center[0] = (min[0] + max[0])*0.5f
center[1] = (min[1] + max[1])*0.5f
center[2] = (min[2] + max[2])*0.5f
return center
通过这两个顶点可以知道以下属性。
float xSize() { return (max[0]-min[0]); }
float ySize() { return (max[1]-min[1]); }
float zSize() { return (max[2]-min[2]); }
float size(){ return (max[0]-min[0])*(max[1]-min[1])*(max[2]-min[2]);}
当添加一个顶点到包装盒时,需要先与这两个顶点进行比较。
void add(float []p) {
if (p[0] < min[0]) min[0] = p[0]
if (p[0] > max[0]) max[0] = p[0]
if (p[1] < min[1]) min[1] = p[1]
if (p[1] > max[1]) max[1] = p[1]
if (p[2] < min[2]) min[2] = p[2]
if (p[2] > max[2]) max[2] = p[2]
检测包装盒是否为空,可以将这两个顶点进行比较。
oolean isEmpty() {
return (min[0] > max[0]) || (min[1] > max[1]) || (min[2] > max[2])
检测某个点是否属于AABB范围之内的代码如下:
oolean contains(float []p){
retur
(p[0] >= min[0]) && (p[0] <= max[0])
(p[1] >= min[1]) && (p[1] <= max[1])
(p[2] >= min[2]) && (p[2] <= max[2])
AABB的静态检测比较简单,检测两个静止包装盒是否相交,它是一种布尔测试,测试结果只有相交或者不相交。这里我们还提供了获取相交范围信息的方法,一般来说,这种测试的目的是为了返回一个布尔值。碰撞的示意如图10-34所示。
图10-34 包装盒的碰撞
检测静态AABB碰撞的方法如下:
oolean intersectAABBs(AABB box2,AABB boxIntersect)
float []box2_min = box2.getMin()
float []box2_max = box2.getMax()
if (min[0] > box2_max[0]) return false
if (max[0] < box2_min[0]) return false
if (min[1] > box2_max[1]) return false
if (max[1] < box2_min[1]) return false
if (min[2] > box2_max[2]) return false
if (max[2] < box2_min[2]) return false
if (boxIntersect != null) {
float []box_intersect_min = new float[3]
float []box_intersect_max = new float[3]
ox_intersect_min[0] = Math.max(min[0], box2_min[0])
ox_intersect_max[0] = Math.min(max[0], box2_max[0])
ox_intersect_min[1] = Math.max(min[1], box2_min[1])
ox_intersect_max[1] = Math.min(max[1], box2_max[1])
ox_intersect_min[2] = Math.max(min[2], box2_min[2])
ox_intersect_max[2] = Math.min(max[2], box2_max[2])
return true
可以利用AABB的结构来加快新的AABB的计算速度,而不用变换8个顶点,再从这8个顶点中计算新AABB。下面简单地回顾4×4矩阵变换一个3D点的过程。
通过原边界框(xmin,ymin,zmin,xmax,ymax,zmax)计算新边界框(,,,,,),现在的任务是计算的速度。换句话说,希望找到m11x+m12y+m13z+m14的最小值。其中[x,y,z]是原8个顶点中的任意一个。
变换的目的是找出这些点经过变换后哪一个的x坐标最小。看第一个乘积m11x,为了最小化乘积,必须决定是用xmin还是xmax来替换其中的x。显然,如果m11>0,用xmin能得到最小化的乘积;如果m11<0,则用xmax能得到最小化乘积。
比较方便的是,不管xmin还是xmax中哪一个被用来计算,都可以用另外一个来计算。可以对矩阵中的9个元素中的每一个都应用这个计算过程(其他元素不影响大小)。
根据变换矩阵和原有的AABB包装盒计算新的AABB包装盒的代码如下:
void setToTransformedBox(Transform t)
if (isEmpty()) { //判断包装盒是否为空
retur
float[] m = new float [16]
t.get(m); //将变换矩阵存入数组
float minx=0,miny=0,minz=0
float maxx=0,maxy=0,maxz=0
minx += m[3]; //x方向上平移
maxx += m[3]; //x方向上平移
miny += m[7]; //y方向上平移
maxy += m[7]; //y方向上平移
minz += m[11]; //z方向上平移
maxz += m[11]; //z方向上平移
if (m[0] > 0.0f) {
minx += m[0] * min[0]; maxx += m[0] * max[0]
} else {
minx += m[0] * max[0]; maxx += m[0] * min[0]
if (m[1] > 0.0f) {
minx += m[1] * min[1]; maxx += m[1] * max[1]
} else {
minx += m[1] * max[1]; maxx += m[1] * min[1]
if (m[2] > 0.0f) {
minx += m[2] * min[2]; maxx += m[2] * max[2]
} else {
minx += m[2] * max[2]; maxx += m[2] * min[2]
if (m[4] > 0.0f) {
miny += m[4] * min[0]; maxy += m[4] * max[0]
} else {
miny += m[4] * max[0]; maxy += m[4] * min[0]
if (m[5] > 0.0f) {
miny += m[5] * min[1]; maxy += m[5] * max[1]
} else {
miny += m[5] * max[1]; maxy += m[5] * min[1]
if (m[6] > 0.0f) {
miny += m[6] * min[2]; maxy += m[6] * max[2]
} else {
miny += m[6] * max[2]; maxy += m[6] * min[2]
if (m[8] > 0.0f) {
minz += m[8] * min[0]; maxz += m[8] * max[0]
} else {
minz += m[8] * max[0]; maxz += m[8] * min[0]
if (m[9] > 0.0f) {
minz += m[9] * min[1]; maxz += m[9] * max[1]
} else {
minz += m[9] * max[1]; maxz += m[9] * min[1]
if (m[10] > 0.0f) {
minz += m[10] * min[2]; maxz += m[10] * max[2]
} else {
minz += m[10] * max[2]; maxz += m[10] * min[2]
min[0] = minx; min[1] = miny; min[2] = minz; //用新的AABB坐标替换原有坐标
max[0] = maxx; max[1] = maxy; max[2] = maxz; //用新的AABB坐标替换原有坐标
为了使用AABB包装盒进行碰撞检测,将这些方法和属性封装为AABB类,代码如下:
import java.lang.Math
import javax.microedition.m3g.Transform
class AABB{
ublic AABB(){}
float [] getMin(){return min;}
float [] getMax(){return max;}
void setMin(float x,float y,float z){min[0]=x;min[1]=y;min[2]=z;}
void setMax(float x,float y,float z){max[0]=x;max[1]=y;max[2]=z;}
void reset(){
for(int i =0;i<3;i++)
min[i]=0
max[i]=0
//其他方法同上
为了检验碰撞检测的使用构造了两个立方体,并各自绑定了一个包装盒。
mesh1 = createCube(); //创建立方体1
mesh1.setTranslation(1.0f, 0.0f,0.0f) ; //平移
mesh1.setOrientation(90,0.0f,1.0f,0.0f); //旋转
mesh1.setScale(0.5f,0.5f,0.5f); //缩放
ox1 = new AABB(); //包装盒
ox1.setMin(-1.0f,-1.0f,-1.0f); //设置包装盒1的最小顶点
ox1.setMax(1.0f,1.0f,1.0f); //设置包装盒1的最大顶点
mesh1.getCompositeTransform(cubeTransform); //获取立方体1的混合矩阵
ox1.setToTransformedBox(cubeTransform); //将变换矩阵应用到包装盒中
world.addChild(mesh1); //将立方体1添加到场景中
mesh2 = createCube(); //创建立方体2
mesh2.setTranslation(-0.5f, 0.0f,0.0f) ; //平移
mesh2.setScale(0.5f,0.5f,0.5f); //缩放
ox2 = new AABB(); //包装盒
ox2.setMin(-1.0f,-1.0f,-1.0f); //设置包装盒2的最小顶点
ox2.setMax(1.0f,1.0f,1.0f); //设置包装盒2的最大顶点
mesh2.getCompositeTransform(cubeTransform); //获取立方体2的混合矩阵
ox2.setToTransformedBox(cubeTransform); //将变换矩阵应用到包装盒2中
world.addChild(mesh2); //将立方体2添加到场景中
检测包装盒1和包装盒2是否碰撞的代码如下:
isCollided = box1.intersectAABBs(box2,null); //检测两个AABB包装盒是否碰撞
编译运行程序,设置两个立方体不同的位置和角度,可以比较精确地检测出它们的碰撞情况,如图10-35所示。
检测两个静止AABB的碰撞情况比较简单,只需要在每一维上单独检查它们的重合程度即可。如果在所有维上都没有重合,那么这两个AABB就不会相交。
AABB间的动态检测稍微复杂一些,考虑一个由顶点smin和smax指定的静态包装盒和一个由顶点mmin和mmax指定的动态包装盒(如果两个都是动态的,可以根据相对运动视作如此)。运动的速度由向量s给出,运动时间t假定为0~1。
图10-35 静态物体碰撞检测示意
移动检测的目标是计算运动AABB碰撞到静态AABB的时刻,因此需要计算出两个AABB在所有维上的第一个点。为了简化起见,可以把上述问题先归结到某一维,然后再将三维结合到一起。假设把问题投影到x轴,如图10-36所示。
图10-36 AABB的动态检测
黑色矩形代表沿坐标轴滑动的AABB,t=0时,运动AABB完全位于静止AABB的左边。当t=1时,运动AABB完全位于静止AABB的右边。当t=tenter时,两个AABB刚刚相交,当t=tleave时,两个AABB脱离碰撞。
对照上图,可以推导出两个AABB接触和离开的时间:
AABB的动态检测有3个要点。
如果速度为0,两个包装盒要么一直相交,要么一直分离。
不管物体从哪个方向运动,碰撞过程中,肯定是先入后出,所以有tenter<tleave。
如果tenter和tleave超出运动时间范围,那么在此范围内它们是不相交的。
检测出某一维的碰撞还不够,还需要进行其他两维的检测,然后取结果的交集。如果交集为空,那么两AABB包装盒没有相交,如果区间范围在时间段[0,1]之外,那么在此区间也不相交。对AABB进行动态检测的方法定义如下:
float intersectMovingAABB(AABB stationaryBox,AABB movingBox,float []s)
float NoIntersection = 1e30f; //没有碰撞则返回大数
float tEnter = 0.0f; //初始化碰撞时间
float tLeave = 1.0f; //初始化离开时间
float Swap = 0.0f; //交换操作中间变量
float [] sBoxmin= stationaryBox.getMin(); //静止包装盒的最小值顶点
float [] sBoxmax= stationaryBox.getMax(); //静止包装盒的最大值顶点
float [] mBoxmin= movingBox.getMin(); //运动包装盒的最小值顶点
float [] mBoxmax= movingBox.getMax(); //运动包装盒的最大值顶点
if (s[0] == 0.0f) { //如果x方向速度为0
if ((sBoxmin[0] >= mBoxmax[0]) ||(sBoxmax[0] <= mBoxmin[0])) {
return NoIntersection; //进行静态检测
} else {
float xEnter = (sBoxmin[0]-mBoxmax[0])/s[0]; //计算碰撞时间
float xLeave = (sBoxmax[0]-mBoxmin[0])/ s[0]; //计算离开时间
if (xEnter > xLeave) { //检查顺序
Swap = xEnter
xEnter = xLeave
xLeave = Swa
if (xEnter > tEnter) tEnter = xEnter; //更新区间
if (xLeave < tLeave) tLeave = xLeave
if (tEnter > tLeave) { //是否导致空重叠区
return NoIntersection; //没有碰撞
if (s[1] == 0.0f) { //y轴速度为0
if ( (sBoxmin[1] >= mBoxmax[1]) || (sBoxmax[1] <= mBoxmin[1])) {
return NoIntersection; //没有相交
} else {
float yEnter = (sBoxmin[1]-mBoxmax[1]) / s[1]
float yLeave = (sBoxmax[1]-mBoxmin[1]) / s[1]
if (yEnter > yLeave) {
Swap = yEnter
yEnter = yLeave
yLeave = Swa
if (yEnter > tEnter) tEnter = yEnter; //更新区间
if (yLeave < tLeave) tLeave = yLeave
if (tEnter > tLeave) {
return NoIntersectio
if (s[2] == 0.0f) { //z方向速度为0
if ((sBoxmin[2] >= mBoxmax[2]) ||(sBoxmax[2] <= mBoxmin[2])) {
return NoIntersectio
} else {
float oneOverD = 1.0f / s[2]
float zEnter = (sBoxmin[2]-mBoxmax[2]) / s[2]
float zLeave = (sBoxmax[2]- mBoxmin[2]) / s[2]
if (zEnter > zLeave) {
Swap = zEnter
zEnter = zLeave
zLeave = Swa
if (zEnter > tEnter) tEnter = zEnter; //更新区间
if (zLeave < tLeave) tLeave = zLeave
if (tEnter > tLeave) {
return NoIntersectio
return tEnter; //返回碰撞时间
为了对移动AABB进行检测,创建两个AABB如图10-37所示。两个包装盒距离0.5,速度为3。
图10-37 移动AABB检测
检测代码如下:
float[] speed = new float []{3.0f,0.0f,0.0f}
float tEnter = intersectMovingAABB(box1,box2,speed)
输出结果为0.16667,完全符合预期的猜测。
前面提到了长条物体在旋转时AABB盒的变化,那么是否有能够在任意方向都更为精确的检测方式,答案是肯定的,这是一种基于OBB即定向包容盒子(Oriented Bounding Box,OBB)的技术,它已经广泛用于光线追踪和碰撞检测中。
OBB这种方法是根据物体本身的几何形状来决定盒子的大小和方向,盒子无须和坐标轴垂直。这样就可以选择最合适的最紧凑的包容盒子。OBB盒子的生成比较复杂。一般是考虑物体所有的顶点在空间的分布,通过一定的算法找到最好的方向(OBB盒子的几个轴)。
一个2D示意图如图10-38所示。
这种技术比AABB技术更精确而且更健壮,但OBB实现起来比较困难,执行速度慢,并且不太适合动态的或柔性的物体。特别注意的是,当把一个物体分得越来越小的时候,事实上是在创建一棵有层次的树,如图10-39所示。
图10-39 OBB树的生成(曲折线为物体)
为任意的网格模型创建OBB树可能是算法里最难的一个部分,而且它还要调整以适合特定的引擎或游戏类型。从图中可以看出,不得不找出包围给定模型的最近似的包装盒(或者其他3D体)。
现在得到了所有的包装盒,下一步将构造一棵树。
从最初的AABB包装盒开始从上至下地反复分割它。另外,还可以用从下至上的方式,逐步地合并小包装盒从而得到最大的包装盒。把大的包装盒分割成小的包装盒,应该遵守以下几条原则。
(1)用一个面(这个面垂直于包装盒中的一条坐标轴)来分割包装盒上最长的轴,然后根据多边形处在分割轴的哪一边把多边形分离开来(如图10-38所示)。
(2)如果不能沿着最长的轴进行分割,那就沿第二长的边分割。持续地分割直到包装盒不能再分割为止。
(3)依据需要的精度(比如,是否真的要判断单个三角形的碰撞),可以按选择的方式(是按树的深度或是按包装盒中多边形的数目)以任意的条件停止分割。
正如读者所看到的,创建阶段相当复杂,其中包括了大量的运算,很明显不能实时地创建树,只能是事先创建。事先创建可以免去实时改变多边形的可能。另一个缺点是OBB要求进行大量的矩阵运算,不得不把它们定位在适当的地方,并且每棵子树必须与矩阵相乘。
现在假设已经有了OBB或者AABB树。那么该怎么进行碰撞检测呢?首先检测最大的包装盒是否相交(AABB级别),如果相交了,它们可能(注意,只是可能)发生了碰撞,接下来将进一步地递归处理它们(OBB级别,不断地递归用下一级进行处理)。
如果沿着下一级,发现子树并没有发生相交,这时就可以停止,并得出结论没有发生碰撞。如果发现子树相交,那么要进一步处理它的子树直到到达叶子节点,并最终得出结论。
碰撞检测最直观的想法是把一个OBB盒子的每个边都和另一个盒子的所有面来比较,如果这个边穿过了另一个OBB盒子的一个面,则两个OBB盒子发生了碰撞。显然这种方法的计算量是比较大的,因为要进行12×6×2=144次边和面的比较。
但是,在考察两个没有碰撞的OBB盒子时,人们发现一些规律来简化比较。
(1)如果两个OBB盒子不互相接触,则应该可以找到一个盒子上的一个面,这个面所在的平面可以把3D空间分为两部分,两个OBB盒子各在两边。
(2)如果没有这样的表面存在,则一定可以在两个OBB盒子上各找出一条边,这两条边所在的平面可以把两个OBB盒子分在两边。有了这个平面,就可以找到垂直于它的分割轴(separating axis),如图10-40所示。
(3)进行相交测试时,可以把包装盒投影到分割轴上,并检查它们是否线性相交。两个OBB盒子在这个分割轴上的投影将是分离的。
如上所述,要判断两个OBB盒子是否碰撞,只需要看两个OBB盒子之间是否有这样的平面和分割轴存在。如果存在,则没有碰撞。如果不存在,则碰撞。 对第一种情况,每个盒子有6个表面(其中每两个平行),可以决定3个分割轴。两个OBB盒子一共有6个可能的分割轴需要考虑。对第二种情况,两个OBB盒 子之间的边的组合可以有3×3=9种情况,也就是有9个可能的分割轴。这样对任意两个OBB盒子,只需要考察15个分割轴就可以了。如果在任一分割轴上的 阴影不重合,则OBB盒子之间没有碰撞。
选择AABB还是选择OBB应该根据所需的精确程度而定。对一个需要快速反应的3D射击游戏来说,可能用AABB来进行碰撞检测更好些——可以牺牲一些精度来换取速度和实现的简单化,因此总能在游戏中看到一些小疏漏。当然随着硬件能力的提高,OBB处理会逐渐被重视起来。
在做碰撞检测时应当遵循以下的优化理论,这样可以改善检测速度。
分两步检验,距离远时看作质点,距离近时采用包装盒。
距离很远的物体不会在短时间内相撞(可以采用BSP树分割空间)。
一个物体不能隔着第二个物体和第三个物体相撞。
一旦一个物体检测到和另一物体碰撞,另一物体对这个物体不再检测。
静止的物体不主动与其他物体碰撞。
以下是另一个博客的OBB解释:
方向包围盒(Oriented bounding box),简称OBB。方向包围盒类似于AABB,但是具有方向性、可以旋转,AABB不能旋转。如图3所示。

图3 矩形和矩形投影检测的四条轴
要计算两个OBB是否碰撞,只需要计算他们在图3上的4个坐标轴上的投影是否有重叠,如果有,则两多边形有接触。这也可以扩展到任意多边形,如图4所示。

图4 矩形和三角形投影检测的五条轴
投影轴来自于多边形自身边的垂线。
判定方式:两个多边形在所有轴上的投影都发生重叠,则判定为碰撞;否则,没有发生碰撞。
OBB存在多种的表达方式,这里使用最常用的一种:一个中心点、2个矩形的边长、两个旋转轴(该轴垂直于多边形自身的边,用于投影计算)。代码如下所示:
(function (window) { var OBB = function (centerPoint, width, height, rotation) { this.centerPoint = centerPoint; this.extents = [width / 2, height / 2]; this.axes = [new Vector2(Math.cos(rotation), Math.sin(rotation)), new Vector2(-1 * Math.sin(rotation), Math.cos(rotation))]; this._width = width; this._height = height; this._rotation = rotation; } window.OBB = OBB;})(window)
其所依赖的Vector2这个类如下所示:
(function (window) { Vector2 = function (x, y) { this.x = x || 0; this.y = y || 0; }; Vector2.prototype = { sub: function (v) { return new Vector2(this.x - v.x, this.y - v.y) }, dot: function (v) { return this.x * v.x + this.y * v.y; } }; window.Vector2 = Vector2;} (window))
然后基于这个数据结构,进行OBB之间的相交测试。为OBB扩展一个方法,即或者在任意轴上的投影半径:
OBB.prototype = { getProjectionRadius: function (axis) { returnthis.extents[0] * Math.abs(axis.dot(this.axes[0])) + this.extents[1] * Math.abs(axis.dot(this.axes[1])); }}
这里你可能需要读者了解Vector2.dot的几何意义:若b为单位矢量,则a与b的点积即为a在方向b的投影。
有了这些,就可以进行相交检测。由上面的判定方式,可以得出,两个矩形之间的碰撞检测需要判断四次(每个投影轴一次)。完整检测代码如下所示:
(function (window) { var CollisionDetector = { detectorOBBvsOBB: function (OBB1, OBB2) { var nv = OBB1.centerPoint.sub(OBB2.centerPoint); var axisA1 = OBB1.axes[0]; if (OBB1.getProjectionRadius(axisA1) + OBB2.getProjectionRadius(axisA1) <= Math.abs(nv.dot(axisA1))) return false; var axisA2 = OBB1.axes[1]; if (OBB1.getProjectionRadius(axisA2) + OBB2.getProjectionRadius(axisA2) <= Math.abs(nv.dot(axisA2))) return false; var axisB1 = OBB2.axes[0]; if (OBB1.getProjectionRadius(axisB1) + OBB2.getProjectionRadius(axisB1) <= Math.abs(nv.dot(axisB1))) return false; var axisB2 = OBB2.axes[1]; if (OBB1.getProjectionRadius(axisB2) + OBB2.getProjectionRadius(axisB2) <= Math.abs(nv.dot(axisB2))) return false; return true; } } window.CollisionDetector = CollisionDetector;})(window)
这里拿两个OBB的中心点连线在坐标轴上的投影长度和两个矩形投影半径之和进行对比,如果半径之后都小于或者等于中心连线之后才判定为碰撞,否则判定为分离状态。
为了更加直观的测试OBB碰撞检测方法,使用Easeljs输出碰撞的状态。当两个矩形没有发生碰撞的时候,两矩形呈现蓝色;当两个矩形发生碰撞的时候,两矩形呈现红色。先引入相关的脚本库以及用于显示的canvas画布:
然后进行OBB初始化以及碰撞检测:
var OBB1, OBB1x = 100, OBB1y = 150, OBB1w = 30, OBB1h = 140, OBB1r = 30;var OBB2, OBB2x = 100, OBB2y = 70, OBB2w = 40, OBB2h = 110, OBB2r = 40;var canvas;var stage;var color;function init() { canvas = document.getElementById("testCanvas"); stage = new Stage(canvas); Ticker.addListener(window);} function tick() { stage.removeAllChildren(); OBB1r += 2; OBB2r += 1; OBB1 = new OBB(new Vector2(OBB1x, OBB1y), OBB1w, OBB1h, OBB1r * Math.PI / 180); OBB2 = new OBB(new Vector2(OBB2x, OBB2y), OBB2w, OBB2h, OBB2r * Math.PI / 180); var r = CollisionDetector.detectorOBBvsOBB(OBB1, OBB2); color=r?"red":"#00F"; OBB1 = new Container(); stage.addChild(OBB1); OBB1.x = OBB1x; OBB1.y = OBB1y; var frame1 = new Shape(); frame1.graphics.beginFill(color).drawRect(0, 0, OBB1w, OBB1h); frame1.rotation = OBB1r; frame1.regX = OBB1w / 2; frame1.regY = OBB1h / 2; OBB1.addChild(frame1); OBB2 = new Container(); stage.addChild(OBB2); OBB2.x = OBB2x; OBB2.y = OBB2y; var frame2 = new Shape(); frame2.graphics.beginFill(color).drawRect(0, 0, OBB2w, OBB2h); frame2.rotation = OBB2r; frame2.regX = OBB2w / 2; frame2.regY = OBB2h / 2; OBB2.addChild(frame2); stage.update();}init()
以上代码定义了两个旋转的OBB包围盒,当他们发生碰撞则改变绘制的颜色,使其成为红色。运行代码,效果图5和6所示。
图5 未发生碰撞
图6 发生碰撞
这里是2D情况下的OBB碰撞检测,对于3D OBB碰撞检测,更为复杂。需要测试15个分离轴以确定OBB的相交状态,两个OBB的坐标轴各3个,以及垂直于每个轴的9个轴。除了坐标轴个数不一样,其相交测试思路和本文一致,本文不再探讨。
阅读全文
0 0
- AABB包围盒算法
- 包围盒算法列表
- 包围盒算法
- 理解AABB包围盒算法
- 理解AABB包围盒算法
- [算法][包围盒]球,AABB,OBB
- 矩形旋转碰撞,OBB方向包围盒算法实现
- 矩形旋转碰撞,OBB方向包围盒算法实现
- 光线与包围盒(AABB)的相交检测算法
- 光线与包围盒(AABB)的相交检测算法
- 矩形旋转碰撞,OBB方向包围盒算法实现
- 光线与包围盒(AABB)的相交检测算法
- OBB包围盒及其碰撞检测算法(一)
- 矩形旋转碰撞,OBB方向包围盒算法实现
- AABB包围盒、OBB包围盒、包围球的比较
- AABB包围盒、OBB包围盒、包围球的比较
- AABB包围盒、OBB包围盒、包围球的比较
- 碰撞检测 包围盒 包围球 XNA
- 地图之美----SuperMap数据产品包展示
- 事件类型(大汇总)
- ReentrantLock
- RF执行用例过程中遇到的问题汇总
- Python在windows下的分布式进程
- 包围盒算法
- spring的applicationContext.xml 两种配置方式
- Unity Shader 学习笔记(3)Unity Shader模板、结构、形式
- #Thinking in Java阅读笔记# 第十一章 持有对象
- ExpressRoute 先决条件和清单
- OSI七层与TCP/IP五层网络架构详解
- jquery 合并两个 json 对象
- python中self,cls
- Go语言发展浅谈


