不同平面直角坐标系之间的转换公式的推导及C#代码实现
来源:互联网 发布:刺客信条大革命1.6优化 编辑:程序博客网 时间:2024/05/16 10:25
本篇讨论的主题是在平面坐标系中如何将一个坐标系(目标坐标系,以下简称目标系)中的所有点投射到另一个坐标系(基坐标系)中。平面坐标系之间的转化一般有三步操作:1、平移;2、旋转;3、拉伸。
在转化的过程中需要的几个已知条件分别是:1、目标系的一个已知点(特征点A)对应于基坐标系中的点(特征点A’)。2、目标系的原点(O)对应于基坐标系中的原点(O')。3、基座标系的原点(O‘’)。
一、坐标系拉伸
①、计算两坐标系X和Y轴分别对应的拉伸比例:


②、将A点按缩放比例映射到基坐标系中(A''):


二、坐标系旋转和平移
①:坐标系旋转
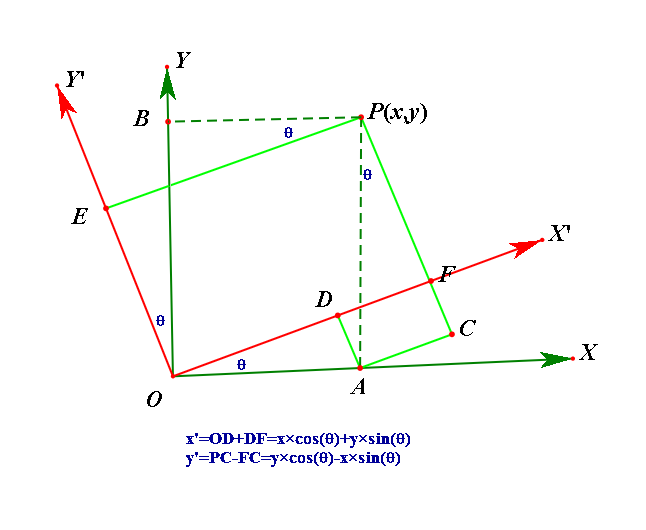
②坐标系平移加旋转
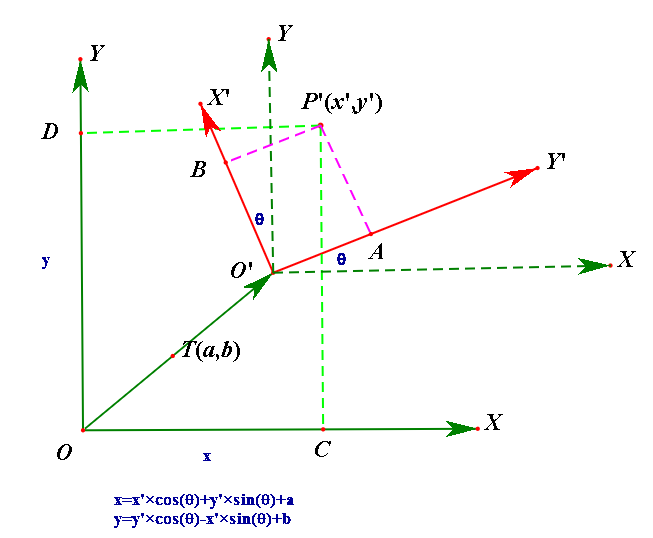
③得出公式
根据坐标系旋转和平移的规则,可以得出公式

我们的目标是求出θ。
设m = cos(θ),n=sin(θ),根据已知量可得出公式:

得出方程组的增广矩阵,根据高斯消除元法即可求得m,n:

再根据反三角函数求得θ,此时θ、a、b、T(坐标系倍数)的值都已经得到。
故任意目标系坐标(x、y)可通过公式映射到基坐标系(f(x)、f(y)):

C#代码:
public class CoorPoint { public double x { get; set; } public double y { get; set; } public CoorPoint() { } public CoorPoint(double x, double y) { this.x = x; this.y = y; } public CoorPoint(CoorPoint pt) { this.x = pt.x; this.y = pt.y; } public static CoorPoint operator +(CoorPoint src, CoorPoint tar) { CoorPoint result = new CoorPoint(src); result.x += tar.x; result.y += tar.y; return result; } public static CoorPoint operator -(CoorPoint src, CoorPoint tar) { CoorPoint result = new CoorPoint(src); result.x -= tar.x; result.y -= tar.y; return result; } public static CoorPoint operator /(CoorPoint src, CoorPoint tar) { CoorPoint result = new CoorPoint(src); result.x /= tar.x; result.y /= tar.y; return result; } public static CoorPoint operator *(CoorPoint src, CoorPoint tar) { CoorPoint result = new CoorPoint(src); result.x *= tar.x; result.y *= tar.y; return result; } } class CoordinateSystemChg { /// <summary> /// 基坐标系:特征点(A') /// </summary> public CoorPoint baseCoor_basePoint { get; set; } /// <summary> /// 基坐标系:原点(O) /// </summary> public CoorPoint baseCoor_originPoint { get; set; } /// <summary> /// 现实坐标系:特征点(A) /// </summary> public CoorPoint realistic_basePoint { get; set; } /// <summary> /// 现实坐标系对应基坐标系拉伸后的点(A'') /// </summary> public CoorPoint realistic_basePointAfterZoom { get; set; } /// <summary> /// 现实坐标系:原点(O) /// </summary> public CoorPoint realistic_originPoint { get; set; } /// <summary> /// 现实坐标系对应基坐标系:原点(O') /// </summary> public CoorPoint realistic_originAsBaseCoorPoint { get; set; } //定义原点时 已经统一缩放比例 //第一步的结果 //位移量:a(x轴),b(y轴) double a = 0; double b = 0; //坐标系倍数 CoorPoint coorTimes; //坐标系夹角 double offsetAngle; //第一步:得到坐标系之间的角度θ /// <summary> /// 计算出两坐标系的X,Y比例 /// </summary> public void GetSale() { coorTimes = (realistic_basePoint - realistic_originPoint) / (baseCoor_basePoint - realistic_originAsBaseCoorPoint); if (coorTimes.x < 0) coorTimes.x = -coorTimes.x; if (coorTimes.y < 0) coorTimes.y = -coorTimes.y; } /// <summary> /// ①按比例缩放(实际坐标系的基点),使之与基坐标系统一 /// </summary> public void DoZoom() { realistic_basePointAfterZoom = realistic_basePoint / coorTimes; } /// <summary> /// ②得到偏移角,入参实际坐标系原点坐标在基坐标系上的坐标 /// </summary> public void GetOffsetAngle() { double[] x = new double[2]; a = (realistic_originAsBaseCoorPoint.x - baseCoor_originPoint.x); b = (realistic_originAsBaseCoorPoint.y - baseCoor_originPoint.y); double[,] g = { { realistic_basePointAfterZoom.x, realistic_basePointAfterZoom.y, (baseCoor_basePoint.x - a) }, { realistic_basePointAfterZoom.y, -realistic_basePointAfterZoom.x, (baseCoor_basePoint.y - b) } }; GaussianElimination(g, x); // x[0]:θ角的余弦值;x[1]:θ角的正弦值 offsetAngle = Math.Acos(x[0]); Console.WriteLine(x[0] + ":" + Math.Acos(x[0])); Console.WriteLine(x[1] + ":" + Math.Asin(x[1])); } //第二步:根据θ角求出在基坐标系中点的映射 /// <summary> /// 将实际坐标系中的点转换到基坐标系中的点 /// </summary> /// <param name="src"></param> /// <param name="rlt"></param> public void GetCoordinateBaseSystem(CoorPoint src, out CoorPoint rlt) { double db1 = Math.Cos(offsetAngle); double db2 = Math.Sin(offsetAngle); rlt = new CoorPoint(); rlt.x = ((src.x / coorTimes.x) * Math.Cos(offsetAngle) + (src.y / coorTimes.y) * Math.Sin(offsetAngle) + a); rlt.y = ((src.y / coorTimes.y) * Math.Cos(offsetAngle) - (src.x / coorTimes.x) * Math.Sin(offsetAngle) + b); } /// <summary> /// 将基坐标系中的点转换到实际坐标系中的点 /// </summary> /// <param name="src"></param> /// <param name="rlt"></param> public void GetCoordinateRealisticSystem(CoorPoint src, out CoorPoint rlt) { double[] x = new double[2]; double[,] g = { { Math.Cos(offsetAngle), Math.Sin(offsetAngle),(src.x - a)*coorTimes.x }, { -Math.Sin(offsetAngle), Math.Cos(offsetAngle),(src.y - b)*coorTimes.y } }; GaussianElimination(g, x); rlt = new CoorPoint(); rlt.x = x[0]; rlt.y = x[1]; } #region 数学方法 //简单的高斯消元法; //输入要求解的扩展矩阵g[m,n];和存放结果的数组x[n]; //返回值为计算结果数组x[n]; public static double[] GaussianElimination(double[,] g, double[] x) { int m = g.GetLength(0);//获得扩展矩阵的行(方程个数); int n = g.GetLength(1);//获得扩展矩阵的列(未知数个数+1); //======================================================== //消元过程; for (int i = 1; i < m; i++) { for (int j = i; j < m; j++) { for (int k = n - 1; k > i - 2; k--) { g[j, k] = g[j, k] - (g[j, i - 1] / g[i - 1, i - 1]) * (g[i - 1, k]); } } } //回代过程; //第一步:翻转; //换行; double tem; for (int i = 0; i < m / 2; i++) for (int j = 0; j < n; j++) { tem = g[i, j]; g[i, j] = g[m - i - 1, j]; g[m - i - 1, j] = tem; } //倒序 for (int i = 0; i < m; i++) for (int j = 0; j < n / 2; j++) { tem = g[i, j]; g[i, j] = g[i, n - 2 - j]; g[i, n - 2 - j] = tem; } //第二步:消元; for (int i = 1; i < m; i++) { for (int j = i; j < m; j++) { for (int k = n - 1; k > i - 2; k--) { g[j, k] = g[j, k] - (g[j, i - 1] / g[i - 1, i - 1]) * (g[i - 1, k]); } } } //第三步:翻回; //重新换行; for (int i = 0; i < m / 2; i++) for (int j = 0; j < n; j++) { tem = g[i, j]; g[i, j] = g[m - i - 1, j]; g[m - i - 1, j] = tem; } //重新倒序; for (int i = 0; i < m; i++) for (int j = 0; j < n / 2; j++) { tem = g[i, j]; g[i, j] = g[i, n - 2 - j]; g[i, n - 2 - j] = tem; } //取结果(这里是正序结果哦); for (int i = 0; i < m; i++) x[i] = g[i, n - 1] / g[i, i]; return x;//返回计算结果; } #endregion }阅读全文
1 0
- 不同平面直角坐标系之间的转换公式的推导及C#代码实现
- 不同平面直角坐标系之间的坐标转换公式
- 直角坐标系的旋转公式
- 不同坐标系之间的转换
- 平面的坐标系转换
- C# 实验五--平面直角坐标系
- PID公式的推导过程及实现代码
- 任意三维直角坐标系变换矩阵的推导
- 平面直角坐标系内两点间的距离
- untiy 2d游戏平面直角坐标系的旋转应用
- 世界坐标系到UVN Camera模型视图坐标系的转换公式的推导
- 平面内直角坐标系中坐标旋转变换公式
- 点到平面的距离公式推导
- 点到平面的距离公式推导
- 《点到平面的距离公式》推导
- 任意两空间直角坐标系的转换的数学模型和算法实现
- 坐标系之间的转换
- 平面坐标系之间点坐标的换算
- 第11周 项目2 数据结构实践——操作用邻接表存储的图
- 第12周 【项目二】 Dijkstra算法的验证
- 函数实现两个数交换
- jquery实现表格全选反选案例
- 结构体定义 typedef struct 用法详解和用法小结
- 不同平面直角坐标系之间的转换公式的推导及C#代码实现
- 特殊密码锁
- kettle再次启动无法启动解决
- 期权交易所巨头CBOE公布其比特币期货规格
- 福布斯:区块链可能改善房地产市场的五种方式
- Systemverilog中的并发
- DTW算法
- 【重磅】新加坡金管局发布《数字代币发行指引》,澄清代币发行的法律适用和监管问题
- Blockstream联合Digital Garage推动日本的区块链发展


