nao机器人学习笔记3
来源:互联网 发布:淘宝二手下载 编辑:程序博客网 时间:2024/04/27 14:22
一、闭环控制
从内存中取得 ”Device/SubDeviceList/LFoot/FSR/CenterofPressure/X/Sensor/Value” 的值,这个值也就是左脚底中心压力的值的X方向,中心压力值,X方向是向前的
Y方向是左右的的。在自己的模块中申明如下的变量AL::ALPtr<AL::ALMemoryProxy> memProxy (成员变量,取内存的一个代理)。取得这个值以后将它用来设置脚的平衡性。
void ClimbStair::keepBalance(){enableStiffness();AL::ALValue LAnkleRoll = "LAnkleRoll"; AL::ALValue LAnkleRollAngle = 0.0f; float fractionMaxSpeed = 0.1f; std::string pressureX = std::string("Device/SubDeviceList/LFoot/FSR/CenterOfPressure/X/Sensor/Value");std::string pressureY = std::string("Device/SubDeviceList/LFoot/FSR/CenterOfPressure/Y/Sensor/Value");// enter the loopwhile (true){AL::ALValue x = mMemory->getData(pressureX);AL::ALValue y = mMemory->getData(pressureY);LAnkleRollAngle = computeAngleFromPressure(x, y);mMotion->changeAngles(LAnkleRoll, LAnkleRollAngle, fractionMaxSpeed);}}AL::ALValue ClimbStair::computeAngleFromPressure(AL::ALValue x, AL::ALValue y){return y;}
这其中CenterOfPressure是一只脚上受力的位置,“CenterOfPressure”的值计算每只脚上FRS的重心(使用各自的重量和位置)X和Y的返回值以m为单位,来自足部参数。请参见“硬件”说明书。使用“centerOfPressure”和来自两只脚的重量,可以计算机器人上所有重量的重心。
操作步骤:
利用目录:
D:\naoqi\Software\Windows\vs2008\naoqi-sdk-1.10.10-windows-vs2008\naoqi-sdk-1.10.10-windows-vs2008\modules\src
下的module_generator.py产生自己的module,输入相关信息后,产生一个模块。然后利用cmake交叉编译(选择为远程执行模块),设置启动项,调试IP设置。然后添加自己的成员变量,成员函数,将要调用的成员函数绑定到模块上。 在Choregraphe中添加指令盒—编辑指令盒:
添加以下指令:
class MyClass(GeneratedClass):def __init__(self):GeneratedClass.__init__(self)def onLoad(self):#~ puts code for box initialization hereself.proxy = ALProxy("ClimbStair ")#这里添加的是自己的module名passdef onUnload(self):#~ puts code for box cleanup herepassdef onInput_onStart(self):#~ self.onStopped() #~ activate output of the boxself.proxy.start()#调用module函数passdef onInput_onStop(self):self.onUnload() #~ it is recommanded to call onUnload of this box in a onStop method, as the code written in onUnload is used to stop the box as wellpass二、利用API单目测距
订阅ALRedBallDetection事件后可以在Memory里变量名 ”redBallDetected” 里得到关于红球目标的信息包括红球的夹角,红球在图像中的距离中心位置的偏角。这些信息里包括时间、球的偏角夹角、摄像机在NAO_SPACE中的位置。(NAO_SPACE的原点在双脚的中心位置)如何订阅事件:
mMemory->subscribeToEvent ("redBallDetected", getName(), "redBallDetectedCallback");
参数1:事件名;参数二:模块名;参数三回调函数,每当检测到红球就去调用redBallDetectedCallback()这个函数。
Tag time_info = [timestamp_seconds, timestamp_microseconds]
The time Stamp when image was take.
Tag ball_info = [u, v, centerX, centerY, radius, score]
u and v are the average u and v components in the YUV color
spacecenterX and centerY are the angular coordinates in camera angles.
radius is the ball radius in pixel and score is 1.0 if red ball detected and 0.0 else.
Tag camera_info = [x, y, z, wx, wy, wz] in NAO_SPACE (see motion documentation)
Subscribe to this module with a minimum of 60ms period.
利用如下代码就可以获得球距离nao的距离:
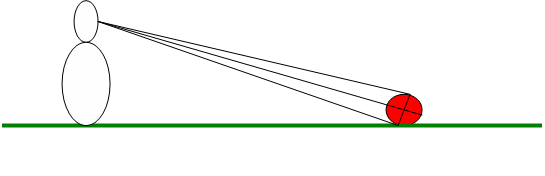
AL::ALValue redBallData = mMemory->getData("redBallDetected");AL::ALValue ballInfo = (*(redBallData.getArrayPtr()))[1];const float BALL_RADIUS = 0.03f;float solidAngle = (float)((*(ballInfo.getArrayPtr()))[2]);solidAngle /= 2.0f;float distance = BALL_RADIUS / sinf(solidAngle);已知半径已知夹角可以求出摄像头到球的距离,在通过三角形定理可以求出红球到nao的距离。
下图是上面计算的一个简单表示
三、全身控制
开启了全身控制后,在做动作的过程中,nao会试着自己保持平衡。将上面所求的球的距离作为一个目标点,控制右手臂到达目标点。在这里wbSetEffectorControl()函数就隐含的开启了全身控制。
float angleX = (float)((*(ballInfo.getArrayPtr()))[0]);float angleY = (float)((*(ballInfo.getArrayPtr()))[1]);float x = BALL_RADIUS / tanf(angleX);float y = BALL_RADIUS / tanf(angleY);std::cout << x << " " << y << std::endl;std::string effectorName = "RArm"; AL::ALValue targetCoordinate = AL::ALValue::array(distance, x, 0.5f); mMotion->wbSetEffectorControl(effectorName, targetCoordinate);
- nao机器人学习笔记3
- nao机器人学习笔记1
- nao机器人学习笔记2
- nao机器人学习笔记4
- nao机器人学习笔记5
- Nao机器人学习笔记:Nao机器人接收邮件并读取邮件内容
- nao机器人学习笔记6:深层开发的环境搭建
- ROS学习--nao机器人开发
- Nao机器人学习(二)
- 机器人NAO
- NAO学习笔记1--获取nao本地图片并展示
- nao机器人学习——hello world(1)
- NAO机器人连接网络
- nao机器人使用
- Nao机器人Any ball detect
- Nao机器人之刷新USBKey
- python 程序控制NAO机器人行走
- NAO机器人代码编译总结
- C++到底能不能快速编程?(看这个桌面天气预报例子,附源码)
- 关于gets()的问题
- "" 与null有什么区别
- 中文化问题
- 免费VIP
- nao机器人学习笔记3
- MFC 执行过程
- c#经典代码(短小精悍的)
- MFC框架如何创建的过程
- Windows Update 第3阶段 循环重新启动问题 解决方案
- 网络连接错误代码大全及解决方法
- 集合中最大的那个数
- 从C++到C——我的C语言学习笔记
- ASP.NET MVC 尝鲜


