数字图像处理之空间域图像增强
来源:互联网 发布:光伏产业数据 编辑:程序博客网 时间:2024/05/01 10:28
滤波过程就是在图像f(x,y)中逐点移动模板(即滤波器),使模板中心和点(x,y)重合,滤波器在每一点的响应是根据模板的具体内容并通过预先定义的关系计算的。
将图像的模板在图像中逐像素移动,并对每个像素进行指定数量的计算的过程就是卷积过程。
包括图像的平滑和锐化。平滑用于去除噪声,锐化用于加强边缘。
在平滑处理中平滑的对象是噪声而不是边缘,在锐化处理中锐化的对象是边缘而不是噪声。
包括平滑滤波器(低通滤波器)和锐化滤波器(高通滤波器) p171
、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、
5.3图像平滑
imfilter滤波
平均模板滤波器
高斯模板:由于平均模板对邻域内的像素一视同仁,为了减少平滑处理中的模糊,得到更自然的平滑效果,则会很自然的想到适当加大模板中点的权重,随着远离中心点,权重迅速减少,从而可以确保中心点看起来更接近与他距离更近的点,基于这种考虑的模板是高斯模板。
高斯模板的名字由来是二维高斯函数,即二维正态分布函数。方差是sigma。
sigma过小,偏离中心的所有像素的权重将会非常小,相当于没有滤波效果。反之相反。
中值滤波

、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、
5.5图像锐化
图像锐化主要用于增强图像中的灰度跳变部分,这一点与图像平滑对灰度跳变的抑制作用刚好相反。事实上从平滑与锐化的两种运算算子上也能看出,线性平滑都是基于对图像邻域的加权求和或积分运算,而锐化则是其逆运算导数(梯度)或有限差分来实现。
噪声和边缘都会使图像产生灰度跳变,需要将噪声和边缘区分。
在平滑处理中平滑的对象是噪声而不是边缘,在锐化处理中锐化的对象是边缘而不是噪声。
5.5.2.基于一阶导数的图像增强--梯度算子
1.robert交叉梯度--需要两次滤波,然后求和
2.sobel梯度
5.5.3.基于2阶微分的图像增强--拉普拉斯算子。由于各向同性,所以只需一次滤波。
5.5.5高频提升滤波机器实现
无论是基于一阶微分的robert还是基于二阶微分的拉普拉斯的模板,其中各系数和均为0。这说明算子在灰度恒定的区域响应为0,即在锐化处理后的图像中,源图像的平滑区近乎于黑色,而原图中所有的边缘,细节,和灰度跳变点都在黑背景中显示出来。在基于锐化的图像增强中,我们常常希望在增强边缘和细节的同时,仍然保留原图像中的信息,而不是将平滑区域的灰度信息丢失。因此可以将源图像加上锐化后的图像以得到比较理想的图像。p171
5.5.6高斯-拉普拉斯变换 LoG
、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、
将图像的模板在图像中逐像素移动,并对每个像素进行指定数量的计算的过程就是卷积过程。
包括图像的平滑和锐化。平滑用于去除噪声,锐化用于加强边缘。
在平滑处理中平滑的对象是噪声而不是边缘,在锐化处理中锐化的对象是边缘而不是噪声。
包括平滑滤波器(低通滤波器)和锐化滤波器(高通滤波器) p171
、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、
5.3图像平滑
imfilter滤波
>> help imfilter IMFILTER Multidimensional image filtering. B = IMFILTER(A,H) filters the multidimensional array A with the multidimensional filter H. A can be logical or it can be a nonsparse numeric array of any class and dimension. The result, B, has the same size and class as A. Each element of the output, B, is computed using double-precision floating point. If A is an integer or logical array, then output elements that exceed the range of the given type are truncated, and fractional values are rounded. B = IMFILTER(A,H,OPTION1,OPTION2,...) performs multidimensional filtering according to the specified options. Option arguments can have the following values: - Boundary options X Input array values outside the bounds of the array are implicitly assumed to have the value X. When no boundary option is specified, IMFILTER uses X = 0. 'symmetric' Input array values outside the bounds of the array are computed by mirror-reflecting the array across the array border. 'replicate' Input array values outside the bounds of the array are assumed to equal the nearest array border value. 'circular' Input array values outside the bounds of the array are computed by implicitly assuming the input array is periodic. - Output size options (Output size options for IMFILTER are analogous to the SHAPE option in the functions CONV2 and FILTER2.) 'same' The output array is the same size as the input array. This is the default behavior when no output size options are specified. 'full' The output array is the full filtered result, and so is larger than the input array. - Correlation and convolution 'corr' IMFILTER performs multidimensional filtering using correlation, which is the same way that FILTER2 performs filtering. When no correlation or convolution option is specified, IMFILTER uses correlation. 'conv' IMFILTER performs multidimensional filtering using convolution. Example ------------- rgb = imread('flowers.tif'); h = fspecial('motion',50,45); rgb2 = imfilter(rgb,h); imshow(rgb), title('Original') figure, imshow(rgb2), title('Filtered') rgb3 = imfilter(rgb,h,'replicate'); figure, imshow(rgb3), title('Filtered with boundary replication') See also CONV2, CONVN, FILTER2. 平均模板滤波器
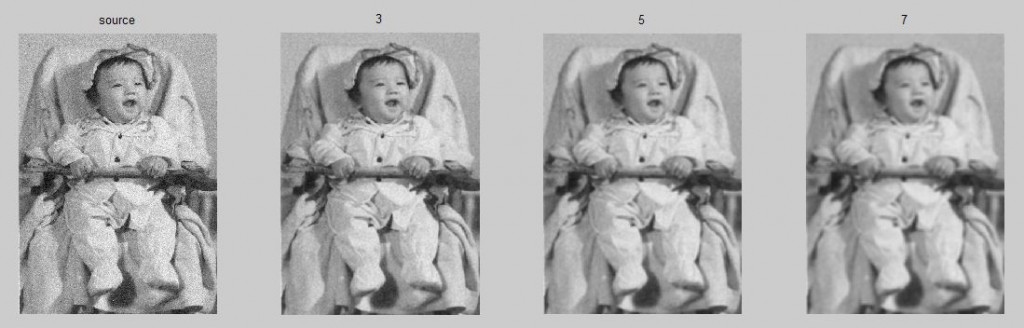
I=imread('baby_noise.bmp'); subplot(1,4,1);;imshow(I);title('source'); h=fspecial('average',3);%3x3模板 I3=imfilter(I,h,'corr','replicate');%执行滤波,replicate重复 subplot(1,4,2);;imshow(I3);title('3'); h=fspecial('average',5);%5x5模板 I5=imfilter(I,h,'corr','replicate'); subplot(1,4,3);;imshow(I5);title('5'); h=fspecial('average',7);%7x7模板 I7=imfilter(I,h,'corr','replicate'); subplot(1,4,4);;imshow(I7);title('7'); 高斯模板:由于平均模板对邻域内的像素一视同仁,为了减少平滑处理中的模糊,得到更自然的平滑效果,则会很自然的想到适当加大模板中点的权重,随着远离中心点,权重迅速减少,从而可以确保中心点看起来更接近与他距离更近的点,基于这种考虑的模板是高斯模板。
高斯模板的名字由来是二维高斯函数,即二维正态分布函数。方差是sigma。
sigma过小,偏离中心的所有像素的权重将会非常小,相当于没有滤波效果。反之相反。
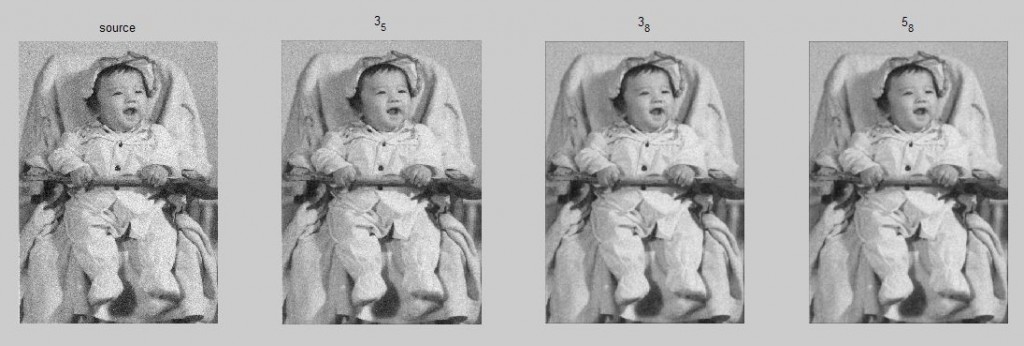
I=imread('baby_noise.bmp'); subplot(1,4,1);imshow(I);title('source'); h=fspecial('gaussian',3,0.5);%3是板数0.5是sigma I3_5=imfilter(I,h); subplot(1,4,2);imshow(I3_5);title('3_5'); h=fspecial('gaussian',3,0.8); I3_8=imfilter(I,h); subplot(1,4,3);imshow(I3_8);title('3_8'); h=fspecial('gaussian',5,0.8); I5_8=imfilter(I,h); subplot(1,4,4);imshow(I5_8);title('5_8');中值滤波
I=imread('lena.gif');%灰度图像 subplot(1,4,1);imshow(I3);title('I'); J=imnoise(I,'salt & pepper');%添加椒盐噪声。黑点同胡椒,白点同盐粒。 subplot(1,4,2);imshow(J);title('J'); h=fspecial('average',3);%3x3模板 I3=imfilter(I,h,'corr','replicate');%执行滤波,replicate重复 subplot(1,4,3);imshow(I3);title('3X3平均'); J=medfilt2(J,[3,3]);%中值滤波 subplot(1,4,4);imshow(I3);title('medfilt2'); 、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、
5.5图像锐化
图像锐化主要用于增强图像中的灰度跳变部分,这一点与图像平滑对灰度跳变的抑制作用刚好相反。事实上从平滑与锐化的两种运算算子上也能看出,线性平滑都是基于对图像邻域的加权求和或积分运算,而锐化则是其逆运算导数(梯度)或有限差分来实现。
噪声和边缘都会使图像产生灰度跳变,需要将噪声和边缘区分。
在平滑处理中平滑的对象是噪声而不是边缘,在锐化处理中锐化的对象是边缘而不是噪声。
5.5.2.基于一阶导数的图像增强--梯度算子
1.robert交叉梯度--需要两次滤波,然后求和
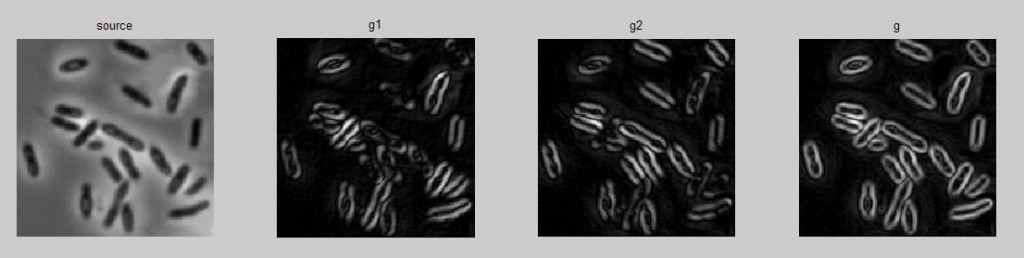
i=imread('bacteria.BMP'); subplot(1,4,1);imshow(i); title('source') ; i=double(i); w1=[-1,0;0,1]; %对正45度方向的边缘有较强响应,从图g1可以看出 w2=[0,-1;1,0]; %对负45度方向的边缘有较强响应,从图g2可以看出 g1=imfilter(i,w1,'corr','replicate');%正45度滤波 g2=imfilter(i,w2,'corr','replicate');%负45度滤波 g=abs(g1)+abs(g2); subplot(1,4,2);imshow(abs(g1),[]);title('g1') ; subplot(1,4,3);imshow(abs(g2),[]);title('g2'); subplot(1,4,4);imshow(g,[]);title('g') ;2.sobel梯度
5.5.3.基于2阶微分的图像增强--拉普拉斯算子。由于各向同性,所以只需一次滤波。
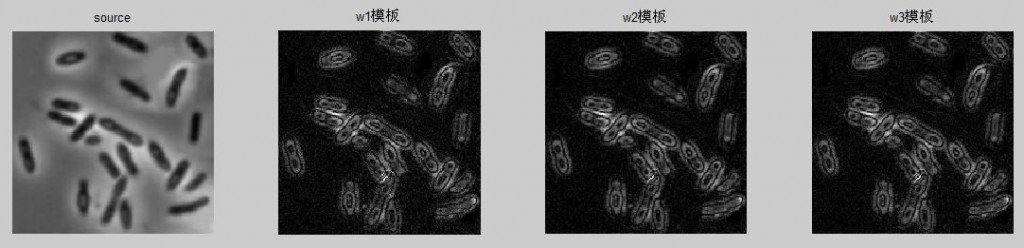
I=imread('bacteria.BMP'); subplot(1,4,1);imshow(I); title('source') ; I=double(I); w1=[0 -1 0;-1 4 -1;0 -1 0]; L1=imfilter(I,w1,'corr','replicate'); subplot(1,4,2);imshow(abs(L1),[]); title('w1模板') ; w2=[-1 -1 -1;-1 8 -1;-1 -1 -1]; L2=imfilter(I,w2,'corr','replicate'); subplot(1,4,3);imshow(abs(L2),[]); title('w2模板') ; w3=[1 4 1;4 -20 4;1 4 1];%加权模板 L3=imfilter(I,w3,'corr','replicate'); subplot(1,4,4);imshow(abs(L3),[]); title('w3模板') ;5.5.5高频提升滤波机器实现
无论是基于一阶微分的robert还是基于二阶微分的拉普拉斯的模板,其中各系数和均为0。这说明算子在灰度恒定的区域响应为0,即在锐化处理后的图像中,源图像的平滑区近乎于黑色,而原图中所有的边缘,细节,和灰度跳变点都在黑背景中显示出来。在基于锐化的图像增强中,我们常常希望在增强边缘和细节的同时,仍然保留原图像中的信息,而不是将平滑区域的灰度信息丢失。因此可以将源图像加上锐化后的图像以得到比较理想的图像。p171
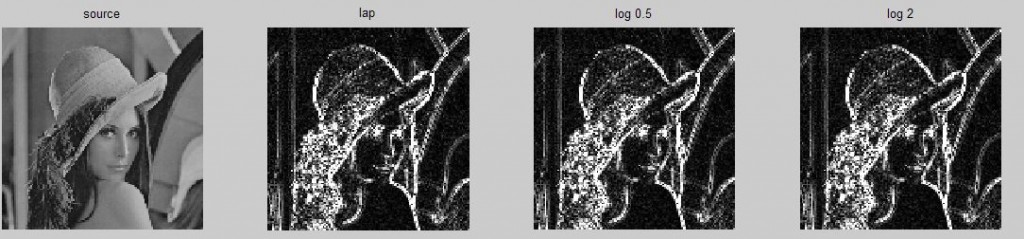
5.5.6高斯-拉普拉斯变换 LoG
I=imread('lena.gif'); subplot(1,4,1);imshow(I); title('source') ; I_double=double(I); %滤波前转化为双精度 h_lap=[-1 -1 -1;-1 8 -1;-1 -1 -1];%拉普拉斯算子 I_lap=imfilter(I_double,h_lap,'corr','replicate');%拉普拉斯锐化 subplot(1,4,2);imshow(uint8(abs(I_lap)),[]); title('lap'); h_log=fspecial('log',5,0.5);%log模板,sigma=0.5 I_log=imfilter(I_double,h_log,'corr','replicate');%log滤波 subplot(1,4,3);imshow(uint8(abs(I_lap)),[]); title('log 0.5') ; h_log=fspecial('log',5,2);%log模板,sigma=2 I_log=imfilter(I_double,h_log,'corr','replicate');%log滤波 subplot(1,4,4);imshow(uint8(abs(I_lap)),[]); title('log 2') ;、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、
- 数字图像处理之空间域图像增强
- 数字图像处理之频率域图像增强
- 数字图像处理之图像增强
- 数字图像处理学习笔记--图像空间域增强
- 《数字图像处理》学习笔记(三)--空间域图像增强
- 数字图像处理-空间域图像增强(二)(直方图)
- 图像处理之空间域图像增强
- 数字图像处理-空间域增强(三)(图像的算数与逻辑运算)
- 数字图像处理图像增强技术
- 数字图像处理 预处理 图像增强
- 数字图像处理图像增强技术
- 数字图像处理-空间域图像增强(一)(图像反转,对数变换,幂次变换、分段线性变换)
- 冈萨雷斯数字图像处理学习4:频率域图像增强1
- 数字图像处理实践[3]---夜间图像增强
- [数字图像处理]模糊算法用于图像增强
- 数字图像处理1--图像增强技术
- 数字图像处理-频域增强
- 数字图像处理---图像空间域变化--灰度变化
- Win 7下使用DNW方法(个人总结)
- [gpu pro2]pre integrated skin shading
- asp.net权限控制
- 数字图像处理之点运算
- 数字图像处理之几何变换
- 数字图像处理之空间域图像增强
- 11.5 完整的服务: 雅虎开发人员网络以及 YUI
- 数字图像处理之频率域图像增强
- 股票买卖
- jQuery基础
- 超轻量级的Gow,替代cgwin
- cin,cout,以及其返回值
- UNIX网络编程学习(8)--服务器端显示客户端的IP地址和端口号
- [gpu pro3]CryEngine3:ThreeYearsOfWorkInReview


