主曲率和主方向
来源:互联网 发布:plc显示屏编程 编辑:程序博客网 时间:2024/05/04 07:57
转自维基百科
在微分几何中,在曲面给定点的两个主曲率(principal curvatures)衡量了在给定点一个曲面在这一点的不同方向怎样不同弯曲的程度。
在三维欧几里得空间中可微曲面的每一点p,可选取一个单位法向量。在 p 的一个法平面是包含该法向量以及与曲面相切的惟一一个方向的平面,在曲面上割出一条平面曲线。这条曲线在p 的不同法平面上一般有不同曲率。在p 的主曲率,记作 k1 与 k2,是这些曲率的最大与最小值。
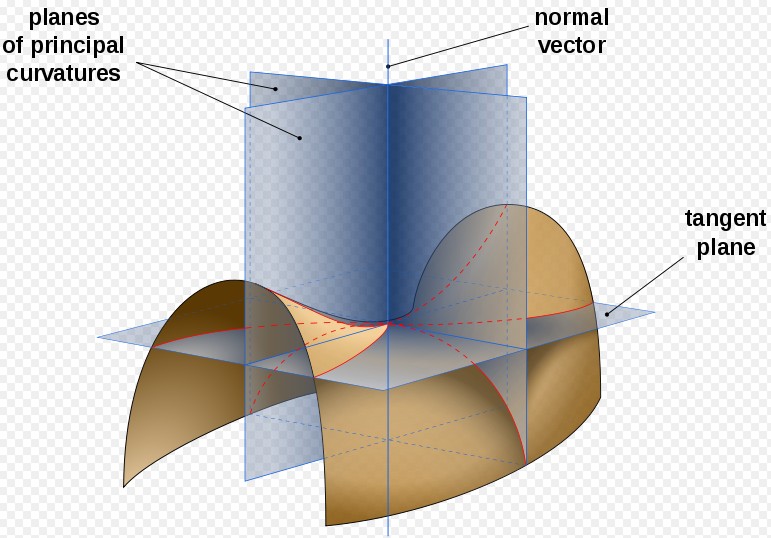
这里一条曲线的曲率由定义是密切圆半径的倒数。当曲线转向与平面给定法向量相同方向时,曲率取正值,否则取负值。当曲率取最大与最小值的两个法平面方向总是垂直的,这是欧拉在1760年的一个结论,称之为主方向。从现代的观点来看,这个定理来自谱定理因为它们可以作为对应于高斯映射微分的一个对称矩阵的本征向量。对主曲率和主方向的系统研究由达布使用达布标架完成。
两个主曲率的乘积 k1k2 是高斯曲率K,而平均值 (k1+k2)/2 是平均曲率H。
如果在每一点至少有一个主曲率是零,则高斯曲率是零,这种曲面是可展曲面。对极小曲面,平均曲率在每一点是零。
- 主曲率和主方向
- 曲面的渐近方向和共轭方向、主方向、曲率线网
- 法曲率、主曲率、平均曲率和高斯曲率
- 主曲率
- 圖像曲率問題(高斯曲率,主曲率,平均曲率)
- 曲面的主曲率与高斯曲率计算
- 曲率
- 曲率
- 摇杆的死区和曲率
- 曲率的计算和曲率图的采样
- 曲率滤波的理论基础和应用
- PCA 图像主方向和圆度
- 图像主方向
- 曲率半径
- 使用自适应阈值和支持动态区域的曲率尺度空间角点检测(分析)
- 使用自适应阈值和支持动态区域的曲率尺度空间角点检测(理论)
- 微积分 —— 曲率与曲率半径
- 曲率卷积核提取图像曲率
- std::string
- RRD起步——通过例子理解RRD(译)
- 掌握 Linux 调试技术
- Android 开发之 字符串-数字 转化
- PHPMailer邮件类的使用教程
- 主曲率和主方向
- transient vs volatile
- jvm
- 优先队列(链表实现)
- 【关于 A^x = A^(x % Phi(C) + Phi(C)) (mod C)(x>=phi(c)) 的若干证明】【指数循环节】
- TransPhone: 手机变平板,爱怎样就怎样
- javascript
- 黑马程序员-HTML表单元素
- hdu 1507 Uncle Tom's Inherited Land* (二分匹配)


