观察者模式
来源:互联网 发布:网络写手的收入 编辑:程序博客网 时间:2024/04/29 09:35
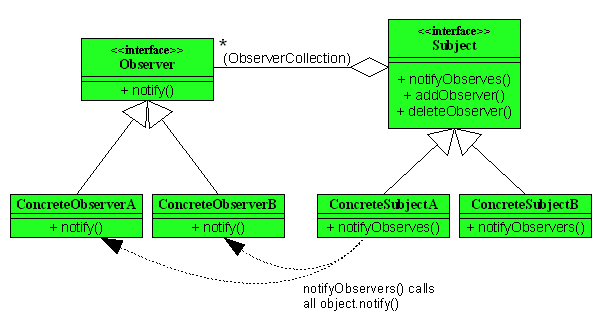
观察者模式(有时又被称为发布/订阅模式)是软件设计模式的一种。在此种模式中,一个目标物件管理所有相依于它的观察者物件,并且在它本身的状态改变时主动发出通知。这通常透过呼叫各观察者所提供的方法来实现。此种模式通常被用来实作事件处理系统。
参与本模式的各类别列出如下。成员函式以模拟的方式列出。
抽象目标类别
此抽象类别提供一个接口让观察者进行添附与解附作业。此类别内有个不公开的观察者串炼,并透过下列函式(方法)进行作业
- 添附(Attach):新增观察者到串炼内,以追踪目标物件的变化。
- 解附(Detach):将已经存在的观察者从串炼中移除。
- 通知(Notify):利用观察者所提供的更新函式来通知此目标已经产生变化。
添附函式包涵了一个观察者物件参数。也许是观察者类别的虚拟函式(即更新函式),或是在非面向对象的设定中所使用的函式指标(更广泛来讲,函式子或是函式物件)。
目标类别
此类别提供了观察者欲追踪的状态。也利用其源类别(例如前述的抽象目标类别)所提供的方法,来通知所有的观察者其状态已经更新。此类别拥有以下函式
- 取得状态(GetState):回传该目标物件的状态。
抽象观察者接口
抽象观察者类别是一个必须被实做的抽象类别。这个类别定义了所有观察者都拥有的更新用接口,此接口是用来接收目标类别所发出的更新通知。此类别含有以下函式
- 更新(Update):会被实做的一个抽象(虚拟)函式。
观察者类别
这个类别含有指向目标类别的参考(reference),以接收来自目标类别的更新状态。此类别含有以下函式
- 更新(Update):是前述抽象函式的实做。当这个函式被目标物件呼叫时,观察者物件将会呼叫目标物件的取得状态函式,来其所拥有的更新目标物件资讯。
每个观察者类别都要实做它自己的更新函式,以应对状态更新的情形。
当目标物件改变时,会通过呼叫它自己的通知函式来将通知送给每一个观察者物件,这个通知函式则会去呼叫已经添附在串炼内的观察者更新函式。通知与更新函式可能会有一些参数,好指明是目前目标物件内的何种改变。这么作将可增进观察者的效率(只更新那些改变部份的状态)。
用途
- 当抽象个体有两个互相依赖的层面时。封装这些层面在单独的物件内将可允许程式设计师单独地去变更与重复使用这些物件,而不会产生两者之间交互的问题。
- 当其中一个物件的变更会影响其他物件,却又不知道多少物件必须被同时变更时。
- 当物件应该有能力通知其他物件,又不应该知道其他物件的实做细节时。
python代码示例:
class AbstractSubject(object): def register(self, listener): raise NotImplementedError("Must subclass me") def unregister(self, listener): raise NotImplementedError("Must subclass me") def notify_listeners(self, event): raise NotImplementedError("Must subclass me") class Listener(object): def __init__(self, name, subject): self.name = name subject.register(self) def notify(self, event): print self.name, "received event", event class Subject(AbstractSubject): def __init__(self): self.listeners = [] self.data = None def getUserAction(self): self.data = raw_input('Enter something to do:') return self.data # Implement abstract Class AbstractSubject def register(self, listener): self.listeners.append(listener) def unregister(self, listener): self.listeners.remove(listener) def notify_listeners(self, event): for listener in self.listeners: listener.notify(event) if __name__=="__main__": # make a subject object to spy on subject = Subject() # register two listeners to monitor it. listenerA = Listener("<listener A>", subject) listenerB = Listener("<listener B>", subject) # simulated event subject.notify_listeners ("<event 1>") # outputs: # <listener A> received event <event 1> # <listener B> received event <event 1> action = subject.getUserAction() subject.notify_listeners(action) #Enter something to do:hello # outputs: # <listener A> received event hello # <listener B> received event helloC++代码
#include <list>#include <vector>#include <algorithm>#include <iostream>using namespace std; // The Abstract Observerclass ObserverBoardInterface{public: virtual void update(float a,float b,float c) = 0;}; // Abstract Interface for Displaysclass DisplayBoardInterface{public: virtual void show() = 0;}; // The Abstract Subjectclass WeatherDataInterface{public: virtual void registerob(ObserverBoardInterface* ob) = 0; virtual void removeob(ObserverBoardInterface* ob) = 0; virtual void notifyOb() = 0;}; // The Concrete Subjectclass ParaWeatherData: public WeatherDataInterface{public: void SensorDataChange(float a,float b,float c) { m_humidity = a; m_temperature = b; m_pressure = c; notifyOb(); } void registerob(ObserverBoardInterface* ob) { m_obs.push_back(ob); } void removeob(ObserverBoardInterface* ob) { m_obs.remove(ob); }protected: void notifyOb() { list<ObserverBoardInterface*>::iterator pos = m_obs.begin(); while (pos != m_obs.end()) { ((ObserverBoardInterface* )(*pos))->update(m_humidity,m_temperature,m_pressure); (dynamic_cast<DisplayBoardInterface*>(*pos))->show(); ++pos; } } private: float m_humidity; float m_temperature; float m_pressure; list<ObserverBoardInterface* > m_obs;}; // A Concrete Observerclass CurrentConditionBoard : public ObserverBoardInterface, public DisplayBoardInterface{public: CurrentConditionBoard(WeatherDataInterface& a):m_data(a) { m_data.registerob(this); } void show() { cout<<"_____CurrentConditionBoard_____"<<endl; cout<<"humidity: "<<m_h<<endl; cout<<"temperature: "<<m_t<<endl; cout<<"pressure: "<<m_p<<endl; cout<<"_______________________________"<<endl; } void update(float h, float t, float p) { m_h = h; m_t = t; m_p = p; } private: float m_h; float m_t; float m_p; WeatherDataInterface& m_data;}; // A Concrete Observerclass StatisticBoard : public ObserverBoardInterface, public DisplayBoardInterface{public: StatisticBoard(WeatherDataInterface& a):m_maxt(-1000),m_mint(1000),m_avet(0),m_count(0),m_data(a) { m_data.registerob(this); } void show() { cout<<"________StatisticBoard_________"<<endl; cout<<"lowest temperature: "<<m_mint<<endl; cout<<"highest temperature: "<<m_maxt<<endl; cout<<"average temperature: "<<m_avet<<endl; cout<<"_______________________________"<<endl; } void update(float h, float t, float p) { ++m_count; if (t>m_maxt) { m_maxt = t; } if (t<m_mint) { m_mint = t; } m_avet = (m_avet * (m_count-1) + t)/m_count; } private: float m_maxt; float m_mint; float m_avet; int m_count; WeatherDataInterface& m_data;}; int main(int argc, char *argv[]){ ParaWeatherData * wdata = new ParaWeatherData; CurrentConditionBoard* currentB = new CurrentConditionBoard(*wdata); StatisticBoard* statisticB = new StatisticBoard(*wdata); wdata->SensorDataChange(10.2, 28.2, 1001); wdata->SensorDataChange(12, 30.12, 1003); wdata->SensorDataChange(10.2, 26, 806); wdata->SensorDataChange(10.3, 35.9, 900); wdata->removeob(currentB); wdata->SensorDataChange(100, 40, 1900); delete statisticB; delete currentB; delete wdata; return 0;}- 观察者模式
- 观察者模式
- 观察者模式
- 观察者模式
- 观察者模式
- 观察者模式
- 观察者模式
- 观察者模式
- 观察者模式
- 观察者模式
- 观察者模式
- 观察者模式
- 观察者模式
- 观察者模式
- 观察者模式
- 观察者模式
- 观察者模式
- 观察者模式
- 我要学ASP.NET MVC 3.0(十四): MVC 3.0 实例系列之创建数据表格
- python实现网络爬虫
- SQL Server数据库,必须启动项
- Android 部分内容设置颜色、字体、超链接、图片
- 一道有趣的笔试题( 水杯量水问题 )
- 观察者模式
- 阻塞与非阻塞I/O
- python中线程的使用
- 深入C++的new【好文转载】
- jsp---->jsp执行过程
- linux socket 编程(C语言)
- 新手:Struts2.0.9部署后启动Tomcat6报错解决
- Android 中的menu以及自定义menu
- C# .NET对通用泛型进行快速排序


