最大流问题
来源:互联网 发布:金融科技 知乎 编辑:程序博客网 时间:2024/05/28 03:02
最近又复习了下最大流问题,每次看这部分的内容都会有新的收获。可以说最大流问题的资料网上一搜一大把,根本没有必要自己写;但是大部分资料上的专业术语太多了,初学很难理解,至少我当年学这部分的时候前几次就没有看懂。所以我准备备份一点个人的理解。
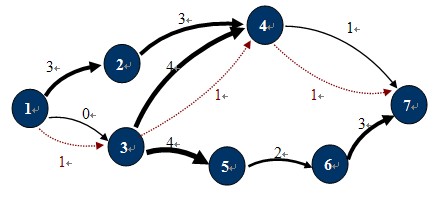 图-1
图-1
如图-1所示,在这个运输网络中,源点S和汇点T分别是1,7,各边的容量为C(u,v)。图中红色虚线所示就是一个可行流。标准图示法如图-2所示:
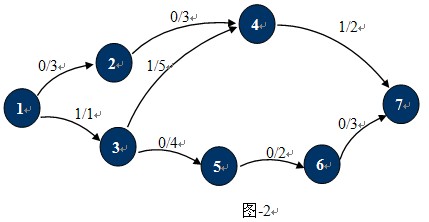
其中p(u,v) / c(u,v)分别表示该边的实际流量与最大容量。
关于最大流
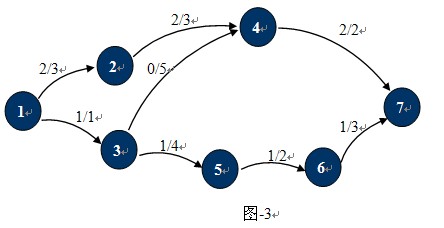
熟悉了什么是网络流,最大流也就很好理解了。就是对于任意的u∈V-{s},使得p(s,u)的和达到最大。上面的运输网络中,最大流如图-3所示:MaxFlow=p(1,2)+p(1,3)=2+1=3。
在介绍最大流问题之前,先介绍几个概念:残余网络,增广路径,反向弧,最大流定理以及求最大流的Ford-Fulkerson方法。
一、残留网络
顾名思义,残留网络是指给定网络和一个流,其对应还可以容纳的流组成的网络。具体说来,就是假定一个网络G=(V,E),其源点s,汇点t。设f为G中的一个流,对应顶点u到顶点v的流。在不超过C(u,v)的条件下(C代表边容量),从u到v之间可以压入的额外网络流量,就是边(u,v)的残余容量(residual capacity),定义如下:
r(u,v)=c(u,v)-f(u,v)
举个例子,假设(u,v)当前流量为3/4,那么就是说c(u,v)=4,f(u,v)=3,那么r(u,v)=1。
我们知道,在网络流中还有这么一条规律。从u到v已经有了3个单位流量,那么从反方向上看,也就是从v到u就有了3个单位的残留网络,这时r(v,u)=3。可以这样理解,从u到v有3个单位流量,那么从v到u就有了将这3个单位流量的压回去的能力。
我们来具体看一个例子,如下图所示一个流网络

其对应的残留网络为:

二、增广路径
在了解了残留网络后,我们来介绍增广路径。已知一个流网络G和流f,增广路径p是其残留网络Gf中从s到t的一条简单路径。形象的理解为从s到t存在一条不违反边容量的路径,向这条路径压入流量,可以增加整个网络的流值。上面的残留网络中,存在这样一条增广路径:

其可以压入4个单位的流量,压入后,我们得到一个新的流网络,其流量比原来的流网络要多4。这时我们继续在新的流网络上用同样的方法寻找增广路径,直到找不到为止。这时我们就得到了一个最大的网络流。
最大流定理
如果残留网络上找不到增广路径,则当前流为最大流;反之,如果当前流不为最大流,则一定有增广路径。
三、流网络的割
上面仅仅是介绍了方法,可是怎么证明当无法再寻找到增广路径时,就证明当前网络是最大流网络呢?这就需要用到最大流最小割定理。
首先介绍下,割的概念。流网络G(V,E)的割(S,T)将V划分为S和T=V-S两部分,使得s属于S,t属于T。割(S,T)的容量是指从集合S到集合T的所有边(有方向)的容量之和(不算反方向的,必须是S-àT)。如果f是一个流,则穿过割(S,T)的净流量被定义为f(S,T)(包括反向的,SàT的为正值,T—>S的负值)。将上面举的例子继续拿来,随便画一个割,如下图所示:

割的容量就是c(u,w)+c(v,x)=26
当前流网络的穿过割的净流量为f(u,w)+f(v,x)-f(w,v)=12+11-4=19
显然,我们有对任意一个割,穿过该割的净流量上界就是该割的容量,即不可能超过割的容量。所以网络的最大流必然无法超过网络的最小割。
可是,这跟残留网络上的增广路径有什么关系呢?
首先,我们必须了解一个特性,根据上一篇文章中讲到的最大流问题的线性规划表示时,提到,流网络的流量守恒的原则,根据这个原则我们可以知道,对网络的任意割,其净流量的都是相等的。具体证明是不难的,可以通过下图形象的理解下,

和上面的割相比,集合S中少了u和v,从源点s到集合T的净流量都流向了u和v,而在上一个割图中,集合S到集合T的流量是等于u和v到集合T的净流量的。其中w也有流流向了u和v,而这部分流无法流向源点s,因为没有路径,所以最后这部分流量加上s到u和v的流量,在u和v之间无论如何互相传递流,最终都要流向集合T,所以这个流量值是等于s流向u和v的值的。将s比喻成一个水龙头,u和v流向别处的水流,都是来自s的,其自身不可能创造水流。所以任意割的净流量都是相等的。
万事俱备,现在来证明当残留网络Gf中不包含增广路径时,f是G的最大流。
假设Gf中不包含增广路径,即Gf不包含从s到v的路径,定义S={v:Gf中从s到v存在一条通路},也就是Gf中s能够有通路到达的点的集合,显然这个集合不包括t,因为s到t没有通路。这时,我们令T=V-S。那么(S,T)就是一个割。如下图所示:

那么,对于顶点u属于S,v属于T,有f(u,v)=c(u,v)。否则(u,v)就存在残余流量,因而s到u加上u到v就构成了一条s到v的通路,所以v就必须属于S,矛盾。因此这时就表明当前流f是等于当前的割的容量的,因此f就是最大流。
Ford-Fulkson算法
在算法导论中对求解最大流问题给出了一般性的解决方法,但并没有涉及到具体的实现。在这里我还是重新的对求解最大流的思想进行一般性的描述,然后再给出具体的实现。
Ford-Fulkerson方法依赖于三种重要思想,这三个思想就是在上一篇网络流基础中提到的:残留网络,增广路径和割。Ford-Fulkerson方法是一种迭代的方法。开始时,对所有的u,v∈V有f(u,v)=0,即初始状态时流的值为0。在每次迭代中,可通过寻找一条“增广路径”来增加流值。增广路径可以看成是从源点s到汇点t之间的一条路径,沿该路径可以压入更多的流,从而增加流的值。反复进行这一过程,直至增广路径都被找出来,根据最大流最小割定理,当不包含增广路径时,f是G中的一个最大流。在算法导论中给出的Ford-Fulkerson实现代码如下:
FORD_FULKERSON(G,s,t)
1 for each edge(u,v)∈E[G]
2 do f[u,v] <— 0
3 f[v,u] <— 0
4 while there exists a path p from s to t in the residual network Gf
5 do cf(p) <— min{ cf(u,v) : (u,v) is in p }
6 for each edge(u,v) in p
7 do f[u,v] <— f[u,v]+cf(p) //对于在增广路径上的正向的边,加上增加的流
8 f[v,u] <— -f[u,v] //对于反向的边,根据反对称性求
第1~3行初始化各条边的流为0,第4~8就是不断在残留网络Gf中寻找增广路径,并沿着增广路径的方向更新流的值,直到找不到增广路径为止。而最后的最大流也就是每次增加的流值cf(p)之和。在实际的实现过程中,我们可以对上述代码做些调整来达到更好的效果。如果我们采用上面的方法,我们就要保存两个数组,一个是每条边的容量数组c,一个就是上面的每条边的流值数组f,在增广路径中判断顶点u到v是否相同时我们必须判断c[u][v]-f[u][v]是否大于0,但是因为在寻找增广路径时是对残留网络进行查找,所以我们可以只保存一个数组c来表示残留网络的每条边的容量就可以了,这样我们在2~3行的初始化时,初始化每条边的残留网络的容量为G的每条边的容量(因为每条边的初始流值为0)。而更新时,改变7~8行的操作,对于在残留网络上的边(u,v)执行c[u][v]-=cf(p),而对其反向的边(v,u)执行c[v][u]+=cf(p)即可。
现在剩下的最关键问题就是如何寻找增广路径。而Ford-Fulkerson方法的运行时间也取决于如何确定第4行中的增广路径。如果选择的方法不好,就有可能每次增加的流非常少,而算法运行时间非常长,甚至无法终止。对增广路径的寻找方法的不同形成了求最大流的不同算法,这也是Ford-Fulkerson被称之为“方法”而不是“算法”的原因。下面将给出Ford-Fulkerson方法的具体实现细节:
int c[MAX][MAX]; //残留网络容量
int pre[MAX]; //保存增广路径上的点的前驱顶点
bool visit[MAX];
int Ford_Fulkerson(int src,int des,int n){ //src:源点 des:汇点 n:顶点个数
int i,_min,total=0;
while(true){
if(!Augmenting_Path(src,des,n))return total; //如果找不到增广路就返回,在具体实现时替换函数名
_min=(1<<30);
i=des;
while(i!=src){ //通过pre数组查找增广路径上的边,求出残留容量的最小值
if(_min>c[pre[i]][i])_min=c[pre[i]][i];
i=pre[i];
}
i=des;
while(i!=src){ //再次遍历,更新增广路径上边的流值
c[pre[i]][i]-=_min;
c[i][pre[i]]+=_min;
i=pre[i];
}
total+=_min; //每次加上更新的值
}
}
Edmonds-Karp算法实际上就是采用广度优先搜索来实现对增广路径的p的计算,代码如下:
bool Edmonds_Karp(int src,int des,int n){int v,i;
for(i=0;i<n;i++)visit[i]=false;
front=rear=0; //初始化
que[rear++]=src;
visit[src]=true;
while(front!=rear){ //将源点进队后开始广搜的操作
v=que[front++];
//这里如果采用邻接表的链表实现会有更好的效率,但是要注意(u,v)或(v,u)有任何一条
//边存在于原网络流中,那么邻接表中既要包含(u,v)也要包含(v,u)
for(i=0;i<n;i++){
if(!visit[i]&&c[v][i]){ //只有残留容量大于0时才存在边
que[rear++]=i;
visit[i]=true;
pre[i]=v;
if(i==des)return true; //如果已经到达汇点,说明存在增广路径返回true
}
}
}
return false;
}
- 网络最大流问题
- 最大流问题
- 最大流问题
- 最大流问题
- 最大流问题
- 最大流问题
- 最大流问题
- 最大流问题
- 最大流问题
- 最大流问题
- 最大流问题
- 最大流问题
- 网络最大流问题
- 最大流问题
- 最大流问题
- 最大流问题
- 最大流问题
- 最大流问题
- Zookeeper集群搭建
- 2014华为机试题---字符压缩
- 网站RSS的使用
- A. Boredom
- 基于Grunt构建一个JavaScript库
- 最大流问题
- GDB 内存断点
- “E576: viminfo: 缺少 '>' 位于行: ” 或者是“ E576: viminfo: Missing '>' in line: ”
- 链式前向星以及代码实现
- Spring-SpringMVC-Hibernate整合
- 安慰
- matlab保存figure中的图片去掉白边
- 像素碰撞检测
- 都这样了,还要不要再争取一下


