PCL—综述—三维图像处理
来源:互联网 发布:linux classpath 编辑:程序博客网 时间:2024/09/21 09:03
PCL—综述—三维图像处理
点云模型与三维信息
三维图像是一种特殊的信息表达形式,其特征是表达的空间中三个维度的数据。和二维图像相比,三维图像借助第三个维度的信息,可以实现天然的物体-背景解耦。除此之外,对于视觉测量来说,物体的二维信息往往随射影方式而变化,但其三维特征对不同测量方式具有更好的统一性。与相片不同,三维图像时对一类信息的统称,信息还需要有具体的表现形式。其表现形式包括:深度图(以灰度表达物体与相机的距离),几何模型(由CAD软件建立),点云模型(所有逆向工程设备都将物体采样成点云)。可见,点云数据是最为常见也是最基础的三维模型。点云模型往往由测量直接得到,每个点对应一个测量点,未经过其他处理手段,故包含了最大的信息量。然而,这些信息隐藏在点云中需要以其他提取手段将其萃取出来,提取点云中信息的过程则为三维图像处理。
点云处理的三个层次
与图像处理类似,点云处理也存在不同层次的处理方式。或者说,根据任务的需求,需要组合不同的处理方式,而这些处理在过程上有先后之分。Marr将图像处理分为三个层次,低层次包括图像强化,滤波,边缘检测等基本操作。中层次包括连通域标记(label),图像分割等操作。高层次包括物体识别,场景分析等操作。工程中的任务往往需要用到多个层次的图像处理手段,在传统的图像处理方法中(传统就是不包括CNN神经网络和大数据集),图像处理的过程需要递增的使用不同层次图像处理来完成任务。
PCL官网对点云处理方法给出了较为明晰的层次划分,如图所示。
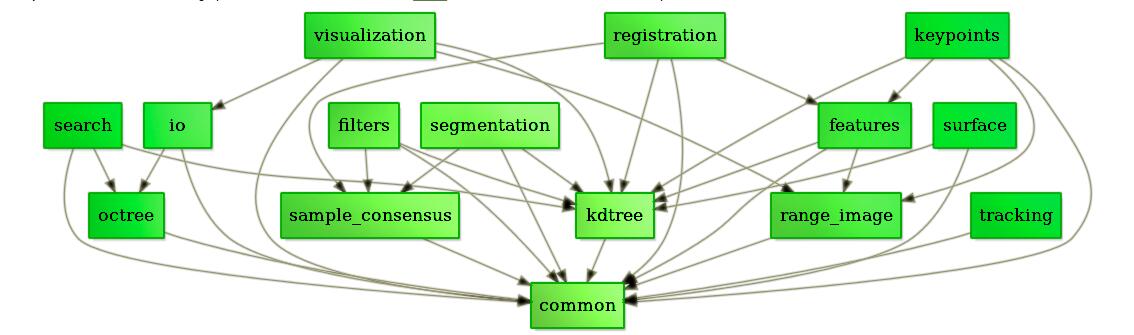
此处的common指的是点云数据的类型,包括XYZ,XYZC,XYZN,XYZG等很多类型点云,归根结底,最重要的信息还是包含在point<pcl::point::xyz>中。可以看出,低层次的点云处理主要包括滤波(filters),关键点(keypoints),分割(segmention)。分别对应图像处理中的滤波,边缘检测,分割。显然,在图像处理中还是中层次的分割操作,由于点云的特性被简化到了低层次的水平,本质上与滤波和关键点提取难度相当了。点云的中层次处理则是特征描述(feature)。高层次处理包括配准(registration),识别(recognition)。可见,点云在分割的难易程度上比图像处理更有优势。准确的分割也为识别打好了基础。
- PCL—综述—三维图像处理
- PCL—综述—三维图像处理
- Windows下三维处理库——PCL点云库安装教程
- 图像处理库综述
- 图像处理综述总结
- PCL系列——三维重构之泊松重构
- 灰度图像--图像分割 阈值处理综述
- 医学图像分割综述—学习
- PCL系列——如何可视化深度图像
- 开源三维点云平台——PCL(Point Cloud Library)
- PCL系列——三维重构之贪婪三角投影算法
- PCL系列——三维重构之移动立方体算法
- PCL 6 综述
- 三维计算机视觉(一)--点云处理综述
- 三维计算机视觉(一)--点云处理综述
- IOS 三维图像处理(九)--CATransform3D
- 关于PCL以及PCL 从一到五综述
- pcl:三维模型obj格式转成pcl常用点云处理格式.pcd+matlab:.ply<->.pcd+其他.stl,.obj,.ply等三维格式互相转化方法
- 解除 wordpress 上传文件大小限制的最新方法
- ORACLE数据库迁移中文乱码问题
- Android spinner点击相同选项处理无法响应事件问题,暴力反射
- 我在csdn的第一个博客
- 手机对话中的语音处理(一)
- PCL—综述—三维图像处理
- AutoCAD界面移植到VB.net应用程序窗体中
- Android代码模拟按下Home键
- 仅用递归函数和栈操作逆序一个栈
- hdu 3466Proud Merchants(01背包 单机调度问题)
- Recovery添加从U盘升级功能
- Android Studio中导入第三方库工程的方法
- is-a, is-like-a, has-a
- jquery 表单 清空


