局部特征(2)——Harris角点
来源:互联网 发布:冰川网络股票股吧 编辑:程序博客网 时间:2024/04/29 06:52
局部特征系列:
局部特征(1)——入门篇
局部特征(2)——Harris角点局部特征(3)——SURF特征总结局部特征(4)——SIFT和SURF的比较局部特征(5)——如何利用彩色信息 Color Descriptors局部特征(6)——局部特征描述汇总
--------------------------------------------------------------
Highlight: 感谢9L同学的推荐,有更优秀的文章讲解检测子:http://www.cnblogs.com/ronny/p/4009425.html 另外本人很久没再研究检测子了,本专题不再update。
在入门篇中偶尔谈到了Harris Corner,在这里我们就重点聊一聊Harris Corner。
Harris Corner是最典型的角点检测子Corner Detector。角点经常被检测在边缘的交界处、被遮挡的边缘、纹理性很强的部分。满足这些条件一般都是稳定的、重复性比较高的点,所以实际上他们是不是角点并不重要(因为我们的目标就是找一些稳定、重复性高的点以作为特征点)。
Harris Corner基于二阶矩阵:
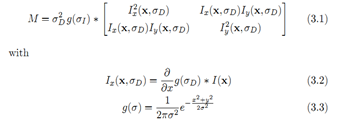
这个矩阵描述了局部邻域内梯度的分布情况。矩阵的两个特征值可以用来描述两个主要方向上信号的变化,因此特征值可以用来判决是否为特征点。Harris采用的判别方法是:
![]()
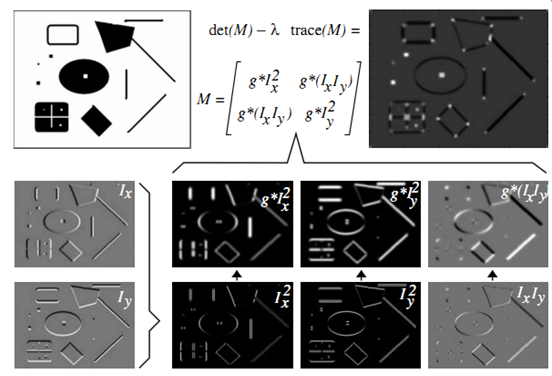
显而易见,cornerness的值越大,对应的两个特征值都应该很大,其中λ取0.04,是为了抑制比较明显的直线。最后对整幅图像得到的cornerness做一个非极大抑制,得到最后的特征点。Harris角点具有的优点是平移不变、旋转不变,能克服一定光照变化。可以先从一个例子上观察Harris Corner实现的过程:
现在有几个问题:首先3.1式矩阵是如何推导出现的;另外一个问题是为什么3.4式用来决定是否为角点(即为何3.1式的两个特征值可以用来描述两个主要方向上信号的变化强度)。
- 第一个问题的解答要知道为什么3.1可以作为这个矩阵,我们了解一下具体怎么推出这个式子的,那这又要从Moravec算子说起,步骤如下:
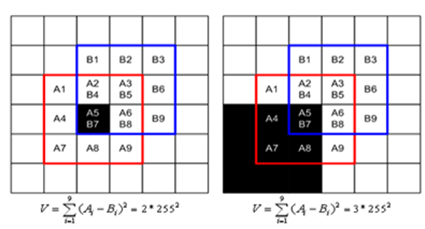
- 将要判断的点置于一个3*3或5*5的图像块的中心,如下图用红色的线环绕的图像块。
- 将红色的框朝8个方向移动一格,得到蓝色的框(下图为向右上角移动)。导致一个缺点:响应是各向异性的(啥意思?)
- 将红色的框和蓝色的框的相同坐标值的点的像素值相减,并求平方和,可以得到8个值。
- 将8个值中的最小的值作为角点像素的变化值。(因为角点应该在x、y方向上变化都比较大;而在边缘上只可能一个方向大、另一个方向小)
- 求出每一个像素点的角点像素变化值,在局部图像块中,该值最大的点为角点。
Harris算子将Moravec算子做了两个推广:
1)用像素的变化梯度代替像素值相减并引入高斯窗函数(举个x方向上变化的例子为证)。
引入高斯窗是为了滤除噪声的干扰。
[-1,0,1]:x方向上的偏导,[-1,0,1]T:y方向上的偏导。
2)推广出了一个公式这样可以计算任意方向上的像素值变化,而不在是8个固定的方向。
(这里的u、v表示x/y方向的位移)
因为Vuv(x,y)的最大值才是这个点需要被考虑的值,因此我们重写以上表达式:
 (3.5)
(3.5)
看到M矩阵的形式了么?这就是Harris算子的那个原始矩阵,我想推到这里,你也就应该了解Harris矩阵为什么是这样子的了。
- 第二个问题:为什么3.4可以用来描述是否为角点。
那么为什么3.1式的两个特征值能够反映数据在两个方向的变化程度?
注意(3.5)式的目标函数(最大化Vuv)。而这个目标函数与PCA的目标函数(通过最大化变化推导PCA的投影方程时)完全一致(如果你记不清这个过程,请你看这里,重点看公式2及之后的文字描述。另外我在这里的留言板中也回答了类似的问题)。特征值是十分重要的概念,不仅在这里以及PCA上,在Laplacian Eigenmaps,LDA上也相应地被使用到。
那么又为什么3.4式取值较大时能保证α和β的取值都很大呢?
a) α和β一个大而另一个小时,det小而trace大,‘-’号就能使cornerness小(而‘+’号却使cornerness依然很大,所以必须是减号而不是加号);
b) α和β都很小时,显然cornerness很小;
c) α和β都很大时(比参数λ更大),此时det会更大于trace从而使cornerness很大。
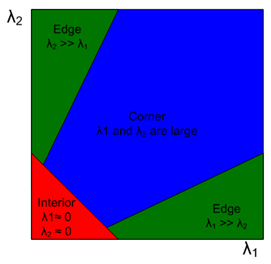
可以参考这样一个图:描述了不同纹理下α和β的取值情况(其中α和β是矩阵M的两个特征值):
- 没有什么纹理的情况下,两个值都很小(很小的正值)
- 边缘的点,一个值大,另外一个值小(由于k取了很小的值,所以3.4的结果为一个小负值)
- 角点:两个值都比较大(比较大的正值)
这样,当我们把目标函数定义为3.4式的时候,得到的结果就会尽力满足两个特征值都比较大了。当然,除此之外,还有Harmonic mean等方式实现更理想的组合方式达到检测出的两个特征值都尽可能大。
最后附上检测效果图(右图进行了旋转)
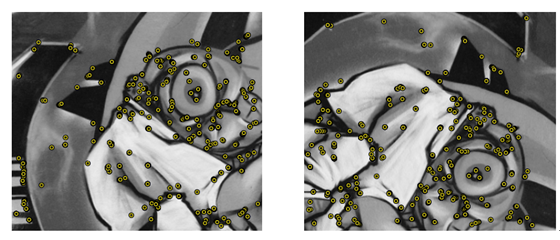
两个图可以看出来Harris corner是rotation invariant,但是不是scale invariant。
------------------------------
jiang1st2010
原文地址:http://blog.csdn.net/jiang1st2010/article/details/7628665
- 局部特征——Harris角点
- 局部特征(2)——Harris角点
- 局部特征(2)——Harris角点
- 局部特征(2)——Harris角点
- 局部特征(2)——Harris角点
- 【局部特征】二、Harris角点
- 图像局部特征(二)--Harris角点检测子
- 图像局部特征学习(笔记1之Harris角点)
- 图像局部特征学习(笔记1之具有尺度不变性的Harris角点)
- 《python+opencv实践》四、图像特征提取与描述——30Harris 角点检测
- 特征检测器-Harris角点检测
- 图像特征之harris角点
- 目标检测之Harris角点特征
- 特征检测:白话Harris角点检测
- 图像特征之Harris角点检测
- 【局部特征】(二)Harris算子
- 图像局部显著性—点特征
- 图像局部显著性—点特征
- LinkedHashMap的介绍
- android布局动画实现方法
- 局部特征(1)——入门篇
- 那些可以整除的数字
- JDBC_数据库连接池(二) DNCP与C3P0的使用方法及代码演示
- 局部特征(2)——Harris角点
- 同行列对角线的格子
- hibernate.hbm2ddl.auto配置
- 局部特征(3)——SURF特征总结
- HUD4010 Query on The Trees
- 学会”融会贯通”简易脱某So壳
- 使用windows内存-内存映射文件
- Android性能优化----图片三级缓存
- c#总结——数据类型与运算符


