关于Quaternion
来源:互联网 发布:淘宝搜索宝贝显示地址 编辑:程序博客网 时间:2024/05/01 09:54
Quaternion.LookRotation 参见 http://blog.csdn.net/lijing_hi/article/details/7272089
quaternion * vector3 参见 http://www.cnblogs.com/88999660/articles/2893126.html 或见下文
在unity3d中,用四元数来表示旋转,四元数英文名叫quaternion . 比如 transform.rotation 就是一个四元数,其由四个部分组成
Quaternion = (xi + yj + zk + w ) = (x,y,z,w)
1. http://en.wikipedia.org/wiki/Quaternion 有四元数的定义
2. http://en.wikipedia.org/wiki/Quaternions_%26_spatial_rotation 有关四元数旋转方面的基本概念和用法
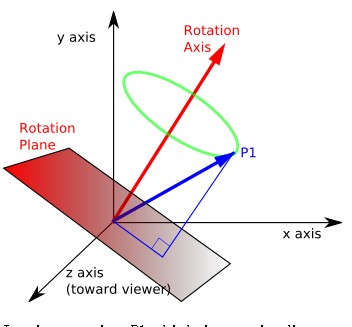
quaternion 中 (x,y,z) 跟旋转轴有关, w 与绕旋转轴旋转的角度有关,因为它们都要经过代数运算才能得出旋转轴和旋转角度
在unity3d中, quaternion 的乘法操作 (operator * ) 有两种操作:
(1) quaternion * quaternion , 例如 q = t * p; 这是将一个点先进行t 操作旋转,然后进行p操作旋转.
(2) Quaternion * Vector3, 例如 p : Vector3, t : Quaternion , q : Quaternion; q = t * p; 这是将点p 进性t 操作旋转;
我进行的是第2种操作,即对一个向量进行旋转;
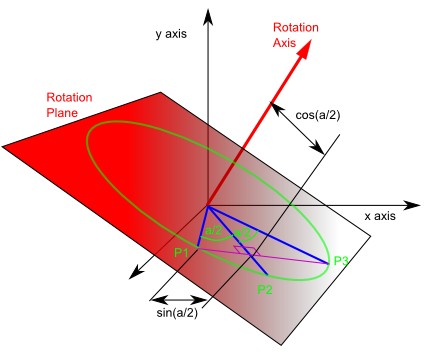
首先 ,Quaternion 的基本数学方程为 : Q = cos (a/2) + i (x * sin(a/2)) + j (y * sin(a/2)) + k(z * sin(a/2)) (a 为旋转角度)
Q.w = cos (angle / 2)
Q.x = axis.x * sin (angle / 2)
Q.y = axis.y * sin (angle / 2)
Q.z = axis.z * sin (angle / 2)
我们只要有角度就可以给出四元数的四个部分值,例如我想要让点M=Vector3(o,p,q) 绕x轴顺时针旋转90度;那么对应的quaternion数值就应该为:
Q : Quaternion;
Q.x = 1 * sin(90度/2) = sin(45度) = 0.7071
Q.y = 0;
Q.z = 0;
Q.w = cos(90度/2) = cos (45度) = 0.7071
Q = (0.7071, 0 , 0 , 0.7071);
m = Q * m; (将点m 绕 x轴(1,0,0) 顺时针旋转了90度)
0 0
- 关于Quaternion
- 关于 Quaternion 的一点心得
- Quaternion
- Quaternion
- Quaternion
- unity 关于四元数Quaternion(原)
- Quaternion Multiply:
- unity3d Quaternion
- unity3d Quaternion
- Quaternion.cpp
- Unity3D Quaternion
- Quaternion.LookRotation
- Quaternion.LookRotation
- Quaternion.Slerp
- Quaternion 四元数
- Quaternion类
- Quaternion.LookRotation
- Quaternion.Lerp
- spring中MessageSource的配置使用方法2--ReloadableResourceBundleMessageSource
- lucene index 锁
- spring-data-redis用配置类连接时,抛异常Cannot get Jedis connection; nested exception is java.lang.NullPointerEx
- 74.深拷贝和完全拷贝对比的探究
- 回文字符串
- 关于Quaternion
- PopUpWindow显示在某个View之上,同时使用动画
- 前端工作总结
- 实现三列布局
- c++实验2
- Visual Studio 2013安装提示"此版本的Visual Studio需要安装了更新版本的windows的计算机"解决
- 算法竞赛前 准备文档
- 自己用python写的性能专项小脚本原理和使用
- 安卓简单手电筒开发


