步进电机
来源:互联网 发布:九州天空城虐心网络帖 编辑:程序博客网 时间:2024/04/28 10:56
两相4线步进电机脉冲的分配用下图示意。
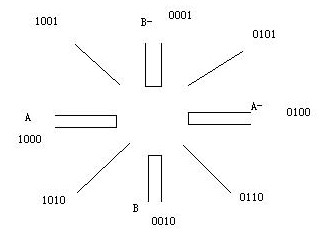
这个图是我自己画的,从图中可以看出来,要实现步进电机的转动,可以用以下两种方式:
(1)8拍的方式
八个状态:1、在A与A-正电压,B与B-不给电悬空;2、在A与A-正电压,B与B-也给正电压;3、A与A-不给电压悬空,B与B-正电压;4、A与A-给负电压,B与B-给正电压;5、A与A-给负电压,B与B-不给悬空;6、A与A-给负电压,B与B-给负电压;7、A与A-不
给电悬空,B与B-给负电压;8、A与给正电压,B与B-给负电压;按以上八个状态轮流供电,控制一下脉宽应该就可以了。
四个引脚各一根控制线:A~H表示各线时序
A B C D E F G H
A 1 1 0 0 0 0 0 1
A- 0 0 0 1 1 1 0 0
B 0 1 1 1 0 0 0 0
B- 0 0 0 0 0 1 1 1
.........
(2)4拍的方式
我的方法
一般是电流驱动的。 我下面的a~ 和b~ 表示反向电流。
两相双二拍:
ab - a~b - a~b~ - ab~ 为一个转向。
ab - ab~ - a~b~ - a~b 为反向。
自己的一点体会:偶觉得两相4线电机 和 四相4线电机 差不多.(这从上面我画的图)也可以看出来,只不过物理上绕线的方式不同(这也导致编程上脉冲表的不同),在功能上是一样的.
四相步进电机有两种运行方式,一、四相四拍;二、四相八拍。要想搞清楚四相八拍运行方式下步进电机的转速如果计算,需要先清楚两个基本概念。1、拍数:完成一个磁场周期性变化所需脉冲数或导电状态用n表示,或指电机转过一个齿距角所需脉冲数,以四相电机为例,有四相四拍运行方式即AB-BC-CD-DA-AB,四相八拍运行方式即 A-AB-B-BC-C-CD-D-DA-A.2、步距角:对应一个脉冲信号,电机转子转过的角位移用θ表示。θ=360度(转子齿数J*运行拍数),以常规二、四相,转子齿为50齿电机为例。四拍运行时步距角为θ=360度/(50*4)=1.8度(俗称整步),八拍运行时步距角为θ=360度/(50*8)=0.9度(俗称半步)。这两个概念清楚后,我们再来计算转速,以基本步距角1.8°的步进电机为例(现在市场上常规的二、四相混合式步进电机基本步距角都是1.8°),四相八拍运行方式下,每接收一个脉冲信号,转过0.9°,如果每秒钟接收400个脉冲,那么转速为每秒400X0.9°=360°,相当与每秒钟转一圈,每分钟60转。其他情况同理可以计算得出
个人总结:
基本原理是:不管几相步进电机,各相分别通”相对磁极的正电”(按顺序通电),则电机每次转动一个步进角,如果相邻两相通电则每次转半个步进角。一个磁场周期性变化,走一个齿。1.8度步进角电机有50个齿。
- 步进电机
- 步进电机
- 步进电机
- 步进电机
- 步进电机
- 步进电机
- 步进电机
- 步进电机
- 步进电机
- 步进电机
- 步进电机
- 步进电机
- 步进电机、步进电机驱动器常见问题解答
- 步进电机控制和步进电机原理
- 直流电机 步进电机 伺服电机
- 步进电机与伺服电机
- 伺服电机步进电机区别
- 步进电机控制器总结
- 【hdu 2087】 剪花布条
- jsp页面中获取session方法
- 自制一个九宫格解锁控件
- rsyslog 日志服务器接收日志权限问题
- 【codevs 2598】编辑距离问题
- 步进电机
- 腾讯游戏一面回忆
- POJ 2431 Expedition 贪心 + 优先队列
- 【NOIP1999】拦截导弹
- Google Hack
- 【NOIP2008】传纸条
- [LeetCode]--3. Longest Substring Without Repeating Characters
- 第50篇 Chrome扩展开发及PHP研究
- 数组排序


