spfa、Dijkstra、Floyd算法最短路算法详解
来源:互联网 发布:淘宝店铺怎么解开 编辑:程序博客网 时间:2024/06/06 06:32
本文章为转载,这里找点哪里找点凑齐的,这样可以方便进行了解几种算法相同点和不同点
spfa部分转自:http://blog.csdn.net/maxichu/article/details/45309463
spfa:适用范围:给定的图存在负权边,这时类似Dijkstra等算法便没有了用武之地,而Bellman-Ford算法的复杂度又过高,SPFA算法便派上用场了。 我们约定有向加权图G不存在负权回路,即最短路径一定存在。当然,我们可以在执行该算法前做一次拓扑排序,以判断是否存在负权回路,但这不是我们讨论的重点。
算法思想:我们用数组d记录每个结点的最短路径估计值,用邻接表来存储图G。我们采取的方法是动态逼近法:设立一个先进先出的队列用来保存待优化的结点,优化时每次取出队首结点u,并且用u点当前的最短路径估计值对离开u点所指向的结点v进行松弛操作,如果v点的最短路径估计值有所调整,且v点不在当前的队列中,就将v点放入队尾。这样不断从队列中取出结点来进行松弛操作,直至队列空为止
期望的时间复杂度O(ke), 其中k为所有顶点进队的平均次数,可以证明k一般小于等于2。
实现方法:
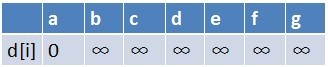
建立一个队列,初始时队列里只有起始点,再建立一个表格记录起始点到所有点的最短路径(该表格的初始值要赋为极大值,该点到他本身的路径赋为0)。然后执行松弛操作,用队列里有的点作为起始点去刷新到所有点的最短路,如果刷新成功且被刷新点不在队列中则把该点加入到队列最后。重复执行直到队列为空。
判断有无负环:
如果某个点进入队列的次数超过N次则存在负环(SPFA无法处理带负环的图)
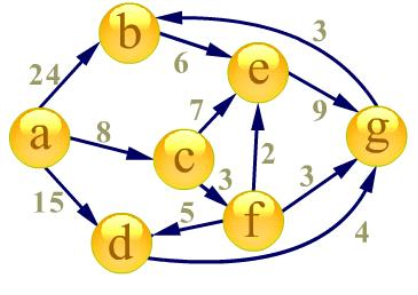
首先建立起始点a到其余各点的最短路径表格
首先源点a入队,当队列非空时:
1、队首元素(a)出队,对以a为起始点的所有边的终点依次进行松弛操作(此处有b,c,d三个点),此时路径表格状态为:
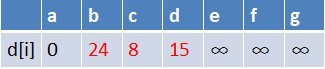
在松弛时三个点的最短路径估值变小了,而这些点队列中都没有出现,这些点
需要入队,此时,队列中新入队了三个结点b,c,d
队首元素b点出队,对以b为起始点的所有边的终点依次进行松弛操作(此处只有e点),此时路径表格状态为:
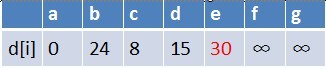
在最短路径表中,e的最短路径估值也变小了,e在队列中不存在,因此e也要
入队,此时队列中的元素为c,d,e
队首元素c点出队,对以c为起始点的所有边的终点依次进行松弛操作(此处有e,f两个点),此时路径表格状态为:
在最短路径表中,e,f的最短路径估值变小了,e在队列中存在,f不存在。因此
e不用入队了,f要入队,此时队列中的元素为d,e,f
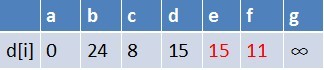
队首元素d点出队,对以d为起始点的所有边的终点依次进行松弛操作(此处只有g这个点),此时路径表格状态为:
队首元素为e,f,g。然后e点出对队,e只指向g,然后此时g的最短路径估值没有变小(松弛不成功),没有新结点入队,队列中元素为f,g,表格状态仍然为:
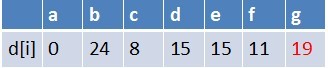
队首元素f点出队,对以f为起始点的所有边的终点依次进行松弛操作(此处有d,e,g三个点),此时路径表格状态为:

在最短路径表中,e,g的最短路径估值又变小,队列中无e点,e入队,队列中存在g这个点,g不用入队,此时队列中元素为g,e
队首元素g点出队,对以g为起始点的所有边的终点依次进行松弛操作(此处只有b点),此时路径表格状态为:
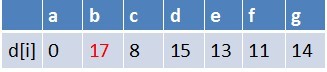
在最短路径表中,b的最短路径估值又变小,队列中无b点,b入队,此时队列中元素为e,b
队首元素e点出队,对以e为起始点的所有边的终点依次进行松弛操作(此处只有g这个点),此时路径表格状态为:
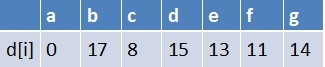
在最短路径表中,g的最短路径估值没变化(松弛不成功),此时队列中元素为b
队首元素b点出队,对以b为起始点的所有边的终点依次进行松弛操作(此处只有e这个点),此时路径表格状态为:
在最短路径表中,e的最短路径估值没变化(松弛不成功),此时队列为空了
最终a到g的最短路径为14。
代码;
#include<iostream>
#include<deque>
#include<cstdio>
#include<algorithm>
using namespace std;
const int MAXN = 110;
const int MAXM = 10100;
const int INF = 0x3f3f3f3f;
struct Edge
{
int from, to, cap, next;
};
Edge edge[MAXM];
int head[MAXN];
int path[MAXN];
int inqueue[MAXN];
int dist[MAXN];
int viscnt[MAXN];
int cnt;
void addedge( int from, int to, int cap )
{
edge[cnt].from = from;
edge[cnt].to = to;
edge[cnt].cap = cap;
edge[cnt].next = head[from];
head[from] = cnt++;
}
int relax(int u,int v,int c)
{
if (dist[u] + c < dist[v])
{
dist[v] = dist[u] + c;
return 1;
}
return 0;
}
bool SPFA( int src, int n )
{
deque<int> dq;
memset( viscnt, 0, sizeof viscnt );
memset( inqueue, 0, sizeof inqueue );
memset( dist, INF, sizeof dist );
memset( path, -1, sizeof path );
inqueue[src] = 1;
viscnt[src]++;
dist[src] = 0;
dq.push_back( src );
while (!dq.empty())
{
int u = dq.front();
dq.pop_front();
inqueue[u] = 0;
for(int i = head[u]; i != -1; i = edge[i].next)
{
int v = edge[i].to;
if(dist[u] < INF&&relax( u, v, edge[i].cap ))
{
path[v] = u;
if(!inqueue[v])
{
inqueue[v] = 1;
viscnt[v]++;
if(viscnt[v] == n) return false;
if(!dq.empty() && dist[v] <= dist[dq.front()])
dq.push_front( v );
else
dq.push_back( v );
}
}
}
}
return true;
}
int main()
{
int n,m;
while(cin >> n >> m &&n&&m)
{
memset( head, -1, sizeof head );
cnt = 0;
for(int i = 1; i <= m; i++)
{
int a, b, c;
cin >> a >> b >> c;
addedge( a, b, c );//在a->b添加一条负载为c的边
addedge( b, a, c );
}
SPFA( 1, n );
cout << dist[n] << endl;
}
return 0;
}
注意:听说下面代码部分未经过测试
以下转自:http://www.cnblogs.com/biyeymyhjob/archive/2012/07/31/2615833.html
Dijkstra算法
1.定义概览
Dijkstra(迪杰斯特拉)算法是典型的单源最短路径算法,用于计算一个节点到其他所有节点的最短路径。主要特点是以起始点为中心向外层层扩展,直到扩展到终点为止。Dijkstra算法是很有代表性的最短路径算法,在很多专业课程中都作为基本内容有详细的介绍,如数据结构,图论,运筹学等等。注意该算法要求图中不存在负权边。
问题描述:在无向图 G=(V,E) 中,假设每条边 E[i] 的长度为 w[i],找到由顶点 V0 到其余各点的最短路径。(单源最短路径)
2.算法描述
1)算法思想:设G=(V,E)是一个带权有向图,把图中顶点集合V分成两组,第一组为已求出最短路径的顶点集合(用S表示,初始时S中只有一个源点,以后每求得一条最短路径 , 就将加入到集合S中,直到全部顶点都加入到S中,算法就结束了),第二组为其余未确定最短路径的顶点集合(用U表示),按最短路径长度的递增次序依次把第二组的顶点加入S中。在加入的过程中,总保持从源点v到S中各顶点的最短路径长度不大于从源点v到U中任何顶点的最短路径长度。此外,每个顶点对应一个距离,S中的顶点的距离就是从v到此顶点的最短路径长度,U中的顶点的距离,是从v到此顶点只包括S中的顶点为中间顶点的当前最短路径长度。
2)算法步骤:
a.初始时,S只包含源点,即S={v},v的距离为0。U包含除v外的其他顶点,即:U={其余顶点},若v与U中顶点u有边,则<u,v>正常有权值,若u不是v的出边邻接点,则<u,v>权值为∞。
b.从U中选取一个距离v最小的顶点k,把k,加入S中(该选定的距离就是v到k的最短路径长度)。
c.以k为新考虑的中间点,修改U中各顶点的距离;若从源点v到顶点u的距离(经过顶点k)比原来距离(不经过顶点k)短,则修改顶点u的距离值,修改后的距离值的顶点k的距离加上边上的权。
d.重复步骤b和c直到所有顶点都包含在S中。
执行动画过程如下图

3.算法代码实现:

const int MAXINT = 32767;const int MAXNUM = 10;int dist[MAXNUM];int prev[MAXNUM];int A[MAXUNM][MAXNUM];void Dijkstra(int v0){ bool S[MAXNUM]; // 判断是否已存入该点到S集合中 int n=MAXNUM; for(int i=1; i<=n; ++i) { dist[i] = A[v0][i]; S[i] = false; // 初始都未用过该点 if(dist[i] == MAXINT) prev[i] = -1; else prev[i] = v0; } dist[v0] = 0; S[v0] = true; for(int i=2; i<=n; i++) { int mindist = MAXINT; int u = v0; // 找出当前未使用的点j的dist[j]最小值 for(int j=1; j<=n; ++j) if((!S[j]) && dist[j]<mindist) { u = j; // u保存当前邻接点中距离最小的点的号码 mindist = dist[j]; } S[u] = true; for(int j=1; j<=n; j++) if((!S[j]) && A[u][j]<MAXINT) { if(dist[u] + A[u][j] < dist[j]) //在通过新加入的u点路径找到离v0点更短的路径 { dist[j] = dist[u] + A[u][j]; //更新dist prev[j] = u; //记录前驱顶点 } } }}
4.算法实例
先给出一个无向图

用Dijkstra算法找出以A为起点的单源最短路径步骤如下

Floyd算法
1.定义概览
Floyd-Warshall算法(Floyd-Warshall algorithm)是解决任意两点间的最短路径的一种算法,可以正确处理有向图或负权的最短路径问题,同时也被用于计算有向图的传递闭包。Floyd-Warshall算法的时间复杂度为O(N3),空间复杂度为O(N2)。
2.算法描述
1)算法思想原理:
Floyd算法是一个经典的动态规划算法。用通俗的语言来描述的话,首先我们的目标是寻找从点i到点j的最短路径。从动态规划的角度看问题,我们需要为这个目标重新做一个诠释(这个诠释正是动态规划最富创造力的精华所在)
从任意节点i到任意节点j的最短路径不外乎2种可能,1是直接从i到j,2是从i经过若干个节点k到j。所以,我们假设Dis(i,j)为节点u到节点v的最短路径的距离,对于每一个节点k,我们检查Dis(i,k) + Dis(k,j) < Dis(i,j)是否成立,如果成立,证明从i到k再到j的路径比i直接到j的路径短,我们便设置Dis(i,j) = Dis(i,k) + Dis(k,j),这样一来,当我们遍历完所有节点k,Dis(i,j)中记录的便是i到j的最短路径的距离。
2).算法描述:
a.从任意一条单边路径开始。所有两点之间的距离是边的权,如果两点之间没有边相连,则权为无穷大。
b.对于每一对顶点 u 和 v,看看是否存在一个顶点 w 使得从 u 到 w 再到 v 比己知的路径更短。如果是更新它。
3).Floyd算法过程矩阵的计算----十字交叉法
方法:两条线,从左上角开始计算一直到右下角 如下所示
给出矩阵,其中矩阵A是邻接矩阵,而矩阵Path记录u,v两点之间最短路径所必须经过的点

相应计算方法如下:



最后A3即为所求结果
3.算法代码实现
typedef struct { char vertex[VertexNum]; //顶点表 int edges[VertexNum][VertexNum]; //邻接矩阵,可看做边表 int n,e; //图中当前的顶点数和边数 }MGraph; void Floyd(MGraph g){ int A[MAXV][MAXV]; int path[MAXV][MAXV]; int i,j,k,n=g.n; for(i=0;i<n;i++) for(j=0;j<n;j++) { A[i][j]=g.edges[i][j]; path[i][j]=-1; } for(k=0;k<n;k++) { for(i=0;i<n;i++) for(j=0;j<n;j++) if(A[i][j]>(A[i][k]+A[k][j])) { A[i][j]=A[i][k]+A[k][j]; path[i][j]=k; } } }
算法时间复杂度:O(n3)
- spfa、Dijkstra、Floyd算法最短路算法详解
- 最短路算法详解(Dijkstra/Floyd/SPFA/A*算法)
- 最短路算法详解(Dijkstra/SPFA/Floyd)
- 最短路算法详解(Dijkstra/SPFA/Floyd)
- 最短路算法详解(Dijkstra/SPFA/Floyd)
- 最短路算法详解(Dijkstra/SPFA/Floyd)
- 最短路算法详解(Dijkstra/SPFA/Floyd)
- 最短路算法详解(Dijkstra/SPFA/Floyd)
- 【最短路三算法】Floyd,Dijkstra,SPFA.
- 最短路算法 :Bellman-ford算法 & Dijkstra算法 & floyd算法 & SPFA算法 详解
- 最短路算法 :Bellman-ford算法 & Dijkstra算法 & floyd算法 & SPFA算法 详解
- 最短路算法 :Bellman-ford算法 & Dijkstra算法 & floyd算法 & SPFA算法 详解
- 最短路算法 :Bellman-ford算法 & Dijkstra算法 & floyd算法 & SPFA算法详解&BFS
- 最短路之Dijkstra算法、Floyd算法、SPFA算法
- 图论:最短路问题 Floyd Dijkstra SPFA算法
- 最短路 Dijkstra Floyd SPFA 三种算法
- 三个最短路算法Dijkstra's;floyd;SPFA
- 最短路的三种算法(Floyd、Dijkstra、SPFA)
- 飞花的糖果
- Latex数学公式表
- 用VS写代码时,出现\vc\include\cmath的情况
- Red5 启动闪退
- Python语言特点
- spfa、Dijkstra、Floyd算法最短路算法详解
- 多线程(线程的状态转换图及常见执行情况)
- 复数的运算(类和对象)
- web.xml执行顺序
- 1002 数塔取数问题
- Javascript获取浏览器类型和版本
- java的形参,返回值,修饰符,内部类的详解
- 网易2017春招 魔力手环 矩阵快速幂
- 关于mybatis批量保存 Parameter '__frch_item_0' not found. Available parameters are [list]的错误


