ORB_SLAM2 with kinect-v1
来源:互联网 发布:mac重复照片清理软件 编辑:程序博客网 时间:2024/05/18 00:19
ORB-SLAM2 with Kinect V1
https://www.cnblogs.com/zengcv/p/6021512.html
因为手上只有kinect V1 没有V2,而网上关于ORB-SLAM2的实现都是基于Kinect2,最著名的是高博进行实现的 http://www.cnblogs.com/gaoxiang12/p/5161223.html。通过查阅部分资料,用Kinect1实现了ORB-SLAM2,这里总结一下具体步骤。
1.我的系统:
Ubuntu14.04, ROS indigo,Lenovo Z485, Kinect V1.
2. 依赖项安装,参照ORB-SLAM2的Prerequisites (dependencies) 部分
2.1 ROS 安装的是indigo(http://wiki.ros.org/indigo/Installation/Ubuntu) sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list' sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116 sudo apt-get update sudo apt-get install libgl1-mesa-dev-lts-utopic sudo apt-get install ros-indigo-desktop-full sudo rosdep init rosdep update echo "source /opt/ros/indigo/setup.bash" >> ~/.bashrc source ~/.bashrc 安装完后,ctrl+alt+t打开终端,执行roscore,测试ROS是否成功安装。2.2 Boostsudo apt-get install libboost-all-dev
2.3 Pangolin安装 (下载地址 https://github.com/stevenlovegrove/Pangolin)git clone https://github.com/stevenlovegrove/Pangolin.git cd Pangolin mkdir build cd build cmake .. make -j2.4 OpenCV (安装的是OpenCV2.4.11,参考网站http://blog.csdn.net/tb_huge/article/details/51784625)
2.5 Eigen3安装 sudo apt-get install libeigen3-dev cd /usr/include/eigen3 (ls查看,含有3个文件: Eigen signature_of_eigen3_matrix_library unsupported) sudo cp Eigen/ .. -R (将Eigen文件夹放在 /usr/include 下面)
2.6DBoW2和g2o (included in Thirdparty) 在ORB-SLAM2的Thirdparty文件夹里面,无需安装。3. 安装ORB-SLAM2 参照ORB-SLAM2的Installation部分 3.1 下载git clone https://github.com/raulmur/ORB_SLAM.git (可以直接放在home下,然后解压) 3.2 修改.bashrc,加入export ROS_PACKAGE_PATH=${ROS_PACKAGE_PATH}:PATH_TO_PARENT_OF_ORB_SLAM (红色字体是需要修改的内容,改为ROS文件夹下的ORB-SLAM2路径)gedit .bashrcexport ROS_PACKAGE_PATH=${ROS_PACKAGE_PATH}:/home/zfy/ORB-SLAM2/Examples/ROS (根据需要,红色字体改为对应的路径) 3.3 cd到Examples/ROS/ORB_SLAM2,然后执行: mkdir build cd build cmake .. -DROS_BUILD_TYPE=Release make -j 编译得到RGBD节点。(ps:新版本的ORB_SLAM2增加了build_ros.sh,里面的内容就是上面4行命令) 3.4 cd到/home/zfy/ORB-SLAM2,执行: chmod +x build.sh ./build.sh 编译完成ORB-SLAM2。 (build.sh中包含编译DBOW2和g2o,编译过程很占用计算资源,电脑会很卡,稍微等等)
4. 安装Kinect V1 驱动
sudo apt-get install libfreenect-dev
sudo apt-get install ros-indigo-freenect-launch
可以通过roslaunch freenect_launch freenect.launch 验证kinect驱动是否安装成功; rostopic list查看ORB-SLAM2需要的两个topic: /camera/rgb/image_raw /camera/depth_registered/image_raw5. 配置launch文件 在解压后的ORB-SLAM2的根目录下新建文件kinect_orbslam2.launch , 其内容为(根据需要,红色字体改为对应的路径,其他的无需修改):
<launch> <param name="orb_use_viewer" value="false"/> <node pkg="ORB_SLAM2" type="RGBD" name="ORB_SLAM2" args="/home/zfy/ORB_SLAM2/Vocabulary/ORBvoc.txt /home/zfy/ORB_SLAM2/Examples/RGB-D/TUM1.yaml" cwd="node" output="screen"/> <include file="$(find freenect_launch)/launch/freenect.launch"> <!-- use device registration --> <arg name="depth_registration" value="true" /> <arg name="rgb_processing" value="true" /> <arg name="ir_processing" value="false" /> <arg name="depth_processing" value="false" /> <arg name="depth_registered_processing" value="true" /> <arg name="disparity_processing" value="false" /> <arg name="disparity_registered_processing" value="false" /> <arg name="sw_registered_processing" value="false" /> <arg name="hw_registered_processing" value="true" /> </include> </launch> 6. 运行ORB-SLAM2 cd ORB-SLAM2 ./build.sh roslaunch kinect_orbslam2.launch
结果如下图: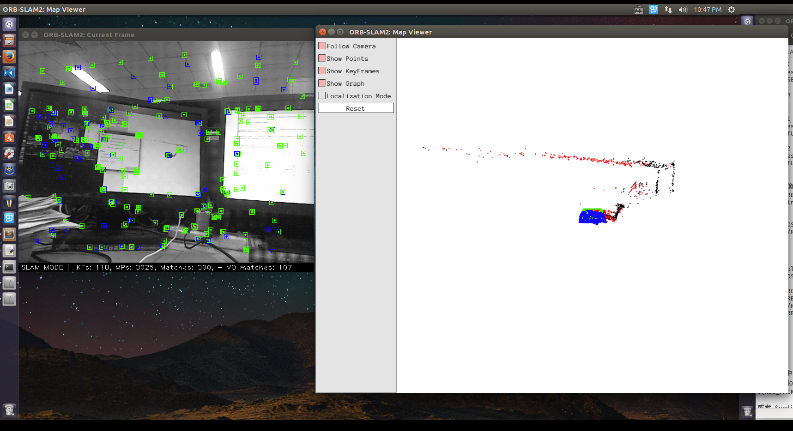
阅读全文
0 0
- ORB_SLAM2 with kinect-v1
- Kinect v1和Kinect v2的比较
- ubuntu 14.04 use Kinect v1
- ROS Indigo安装Kinect v1
- Kinect SDK v1.5--Kinect+Unity3D 体感游戏开发
- 【翻译】Kinect v1和Kinect v2的彻底比较
- 安装kinect v1驱动和kinect v2驱动,适合新手入门
- Kinect + Cursor + Source = Kinecursor v1.1.1
- Kinect SDK V1.7 开发工具包概览
- ubuntu12.04 安装kinect V1驱动
- Ubuntu 16.04驱动Kinect V1笔记
- ROS视觉和图像-Kinect V1使用
- ubuntu 16.04+kinect v1配置运行 Kintinuous
- Kinect v1配置运行Github-mp3guy/Logger2
- Kinect on Ubuntu with OpenNI
- Kinect桥接OpenCV代码简介Kinect Bridge With OpenCV
- Kinect桥接Matlab代码简介Kinect Bridge With Matlab
- Kinect For Windows SDK v1.0 - 底座马达移动
- linux 批量转换GBK到UTF-8编码的方法
- ReactNative0.44之后不能使用Navigator
- 启动web项目时报网页cookie重定向多次解决方法
- 好文索引
- Redis持久化存储(AOF与RDB两种模式)
- ORB_SLAM2 with kinect-v1
- [译]Android Application启动流程分析
- 简单实现美团城市切换
- Xilisoft Photo Slideshow Maker for Mac(电子相册制作)附注册机 V1.0.2中文破解版
- 我所了解的IT行业风险投资
- python最简单的小爬虫
- eclipse 一些实用快捷键
- 51汇编指令集详解
- EASYUI DATAGRID 多列复选框CheckBox


