Harris角点检测: Harris Corner Detector
来源:互联网 发布:淘宝买家信誉查询工具 编辑:程序博客网 时间:2024/04/30 09:11

Harris Corner Detector
The Harris Corner Detector is a mathematical operator that finds features (what are features?) in an image. It is simple to compute, and is fast enough to work on computers. Also, it is popular because it is rotation, scale and illumination variation independent. However, the Shi-Tomasi corner detector, the one implemented in OpenCV, is an improvement of this corner detector.
The mathematics
To define the Harris corner detector, we have to go into a bit of math. We'll get into a bit of calculus, some matrix math, but trust me, it won't be tough. I'll make everything easy to understand!
Our aim is to find little patches of image (or "windows") that generate a large variation when moved around. Have a look at this image:
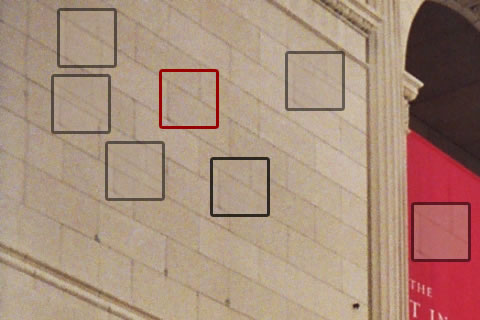
Marked areas have a lot variation
The red square is the window we've chosen. Moving it around doesn't show much of variation. That is, the difference between the window, and the original image below it is very low. So you can't really tell if the window "belongs" to that position.
Of course, if you move the window too much, like onto the reddish region, you're bound to see a big difference. But we've moved the window too much. Not good.
Now have a look at this:
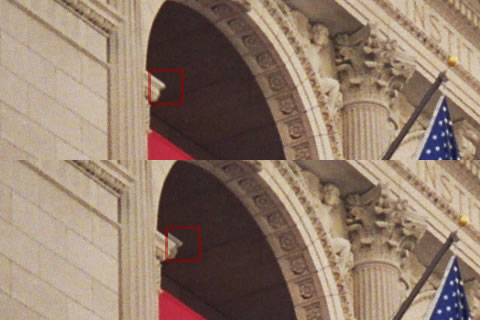
Regions with extremely high variation
See? Even the little movement of the window produces a noticeable difference. This is the kind of window we're looking for. Here's how it translates mathematically:

The equation
- E is the difference between the original and the moved window.
- u is the window's displacement in the x direction
- v is the window's displacement in the y direction
- w(x, y) is the window at position (x, y). This acts like a mask. Ensuring that only the desired window is used.
- I is the intensity of the image at a position (x, y)
- I(x+u, y+v) is the intensity of the moved window
- I(x, y) is the intensity of the original
We've looking for windows that produce a large E value. To do that, we need to high values of the terms inside the square brackets.
(Note: There's a little error in these equations. Can you figure it out? Answer below!)
So, we maximize this term:
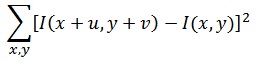
Then, we expand this term using the Taylor series. Whats that? It's just a way of rewriting this term in using its derivatives.

See how the I(x+u, y+v) changed into a totally different form ( I(x,y)+uIx + vIy )? Thats the Taylor series in action. And because the Taylor series is infinite, we've ignored all terms after the first three. It gives a pretty good approximation. But it isn't the actual value.
Next, we expand the square. The I(x,y) cancels out, so its just two terms we need to square. It looks like this:

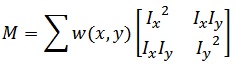
Now this messy equation can be tucked up into a neat little matrix form like this:
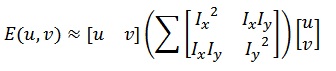
See how the entire equation gets converted into a neat little matrix!
(The error: There's no w(x, y) in these errors :P )
Now, we rename the summed-matrix, and put it to be M:
 So the equation now becomes:
So the equation now becomes:
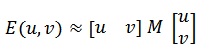
Looks so neat after all the clutter we did above.
Interesting windows
It was figured out that eigenvalues of the matrix can help determine the suitability of a window. A score, R, is calculated for each window:
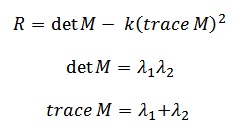
All windows that have a score R greater than a certain value are corners. They are good tracking points.
Summary
The Harris Corner Detector is just a mathematical way of determining which windows produce large variations when moved in any direction. With each window, a score R is associated. Based on this score, you can figure out which ones are corners and which ones are not.
OpenCV implements an improved version of this corner detector. It is called the Shi-Tomasi corner detector.
from: http://aishack.in/tutorials/harris-corner-detector/
- Harris角点检测: Harris Corner Detector
- Harris角点检测(Harris Corner Detector)
- Harris Corner 角点检测
- A COMBINED CORNER AND EDGE DETECTOR(Harris 角点检测子)
- Harris corner detector algorithm
- 角点检测harris corner公式推导详解
- Harris corner detector数学理解
- harris corner detector java实现
- Harris 角点检测
- Harris角点检测
- Harris角点检测
- Harris角点检测
- Harris角点检测
- harris角点检测
- Harris角点检测
- Harris角点检测
- Harris角点检测
- Harris角点检测
- Websocket判断逻辑Bug
- 猫猫学iOS 之广告轮播图,collectionView制作(源码)
- [IOS]几种按钮失效的情况
- nginx+uwsgi+flask小例子
- 欢迎使用CSDN-markdown编辑器
- Harris角点检测: Harris Corner Detector
- Linux下把项目部署到tomcat
- postgre- 常用基本sql 语句
- 霍夫变换基础知识-- The Hough Transform: Basics
- Android自定义九宫格图案解锁
- 数据结构与算法——提供一个单词,在字典中找到它的兄弟
- OC中数组的基本操作
- Android 源码编译遇到的几个错误
- 霍夫变换的标准形式--The Hough Transform: Normal form


