Kalman Filter
来源:互联网 发布:外国诗歌流派 知乎 编辑:程序博客网 时间:2024/05/21 11:28
Kalman 滤波
摘自博客
知乎来源
卡尔曼原第一手论文
Understanding the Basis of the Kalman Filter
Via a Simple and Intuitive Derivation
Kalman滤波算法的本质就是利用两个正态分布的融合仍是正态分布这一特性进行迭代而已
在著名的阿波罗导航计算机中就试用了卡尔曼滤波,带着阿姆斯特朗在月球和地球之间穿梭。
简单的说 ,卡尔曼滤波器是一个最优化自回归数据处理算法。最优依赖于评价性能的判据,递归式是指卡尔曼不需要保存先前的数据。
卡尔曼滤波器的介绍:
生活实例:在海图作业中,船长通常以前一小时的船位为基准,根据航向、船速和海流等一些列因素推算下一个船位,但是他并不轻易认为船位就一定在推算船位上,还要选择适当的方法,通过仪器得到另一个推算船位。观测和推算这两个船位一般不重合,船长需要通过分析和判断选择一个可靠的船位,作为船的当前位置。
基本原理:以
下面以室内温度道来:
以小时为单位,假设要估算k时刻的室内温度,现在我们依据k-1时刻的温度(23℃)及其偏差(±3℃),我们猜测k时刻的温度也应为23℃(自己对自己预测的不确定度假定为±4℃),则预测值(23℃)的高斯噪声为
下面,我们就可以根据以上预测值和观测值得到最优估计值
Question: 我们究竟相信预测值(23℃)多一点还是观测值(25℃)多一点?
一、需用到均方误差公式
二、最优估计温度值
三、计算最优估计值的误差
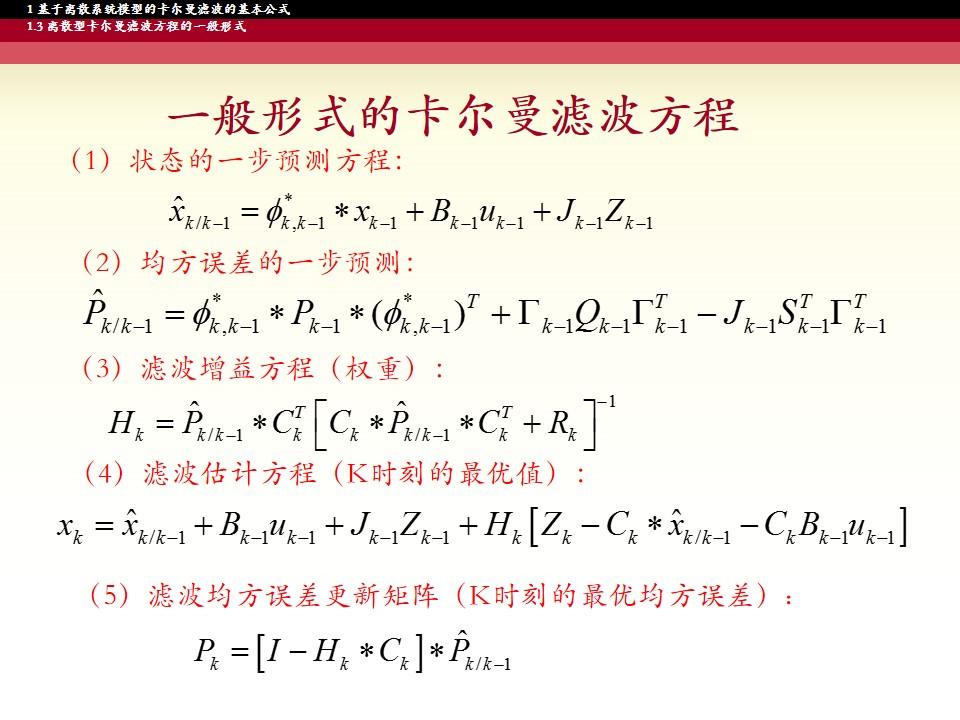
一般卡尔曼滤波公式
- Kalman filter
- Kalman filter
- Kalman Filter
- Kalman Filter
- kalman filter
- Kalman Filter
- 有关Kalman Filter
- Kalman Filter笔记(1)
- Kalman Filter笔记(2)
- The Kalman Filter
- The Kalman Filter
- 【MATLAB】Extended Kalman Filter
- Kalman Filter介绍
- Kalman filter Intro - wiki
- Kalman Filter算法入门
- Learning Kalman filter
- Kalman filter 使用经验总结
- opencv kalman filter
- R语言使用RJDBC包连接MySql、Oracle数据库
- sklearn PCA使用
- 详解值传递和引用传递
- HDU-1213 How Many Tables
- 特性---封装
- Kalman Filter
- Activity launch mode
- 普通索引 唯一索引 主键索引 候选索引
- 数据结构——树(3):二叉树的前中后层序遍历,Morris遍历比较试验
- DBCP1.3连接泄露问题
- 集合 反复器
- Proteus仿真AT89C52——定时器
- 【题解】Luogu 骑马修栅栏 Riding the Fences (欧拉回路+搜索)
- 用express搭建一个简单的博客系统